
Оглавление:

Кинематический анализ кулачковых механизмов
- Определение скоростей и ускорений при кинематическом анализе кулачковых механизмов можно производить или путем графического дифференцирования, или путем построения планов скоростей и
ускорений. Фиг. НО. При построении планов скоростей и ускорений кулачковый механизм, как и всякий механизм с высшей парой, должен быть заменяем механизмом, содержащим только низшие пары. При замене высшей пары одним звеном с двумя низшими парами необходимо знать
радиусы кривизны профилей звеньев Людмила Фирмаль
высшей пары в точках их соприкосновения; в тех случаях, когда профили очерчены нематематическими кривыми, приходится пользоваться приближенными величинами радиусов кривизны. При замене кулачковых механизмов механизмами с низшими парами необходимо исходить из кинематических схем механизмов. На кинематической схеме каждого из них должен быть изображен
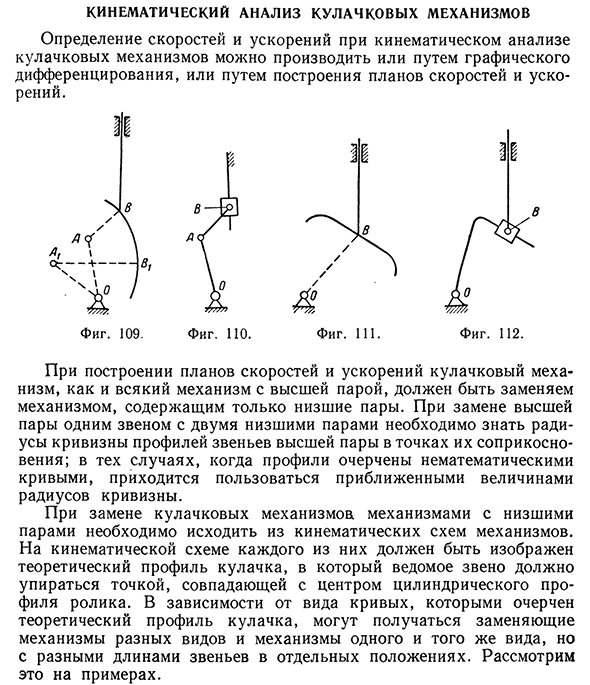
теоретический профиль кулачка, в который ведомое звено должно упираться точкой, совпадающей с центром цилиндрического профиля ролика. В зависимости от вида кривых, которыми очерчен теоретический профиль кулачка, могут получаться заменяющие механизмы разных видов и механизмы одного и того же вида, но с разными длинами звеньев в отдельных положениях. Рассмотрим это на примерах.94 Кулачковые механизмы На фиг. 109 изображен
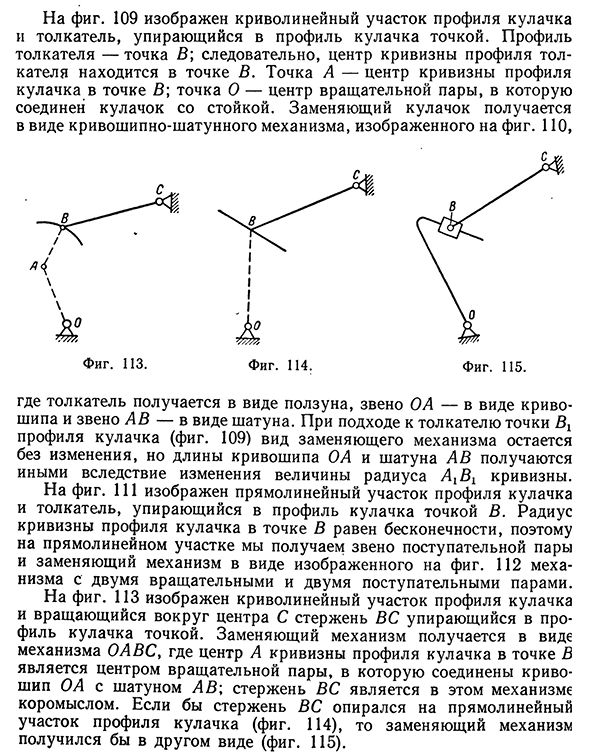
- криволинейный участок профиля кулачка и толкатель, упирающийся в профиль кулачка точкой. Профиль толкателя — точка В; следовательно, центр кривизны профиля толкателя находится в точке В. Точка А — центр кривизны профиля кулачка в точке В; точка О — центр вращательной пары, в которую соединен кулачок со стойкой. Заменяющий кулачок получается в виде кривошипно-шатунного механизма, изображенного на фиг. 110, \ \ к Фиг. 113. Фиг. 114. I I где толкатель получается в виде ползуна, звено О А — в виде криво шипа и звено АВ — в виде шатуна. При подходе к толкателю
точки BY профиля кулачка (фиг. 109) вид заменяющего механизма остается без изменения, но длины кривошипа ОА и шатуна АВ получаются иными вследствие изменения величины радиуса А ^ кривизны. На фиг. 111 изображен прямолинейный участок профиля кулачка и толкатель, упирающийся в профиль кулачка точкой В. Радиус кривизны профиля кулачка в точке
В равен бесконечности, поэтому на прямолинейном участке мы получаем звено Людмила Фирмаль
поступательной пары и заменяющий механизм в виде изображенного на фиг. 112 меха низма с двумя вращательными и двумя поступательными парами. На фиг. ИЗ изображен криволинейный участок профиля кулачка и вращающийся вокруг центра С стержень ВС упирающийся в про филь кулачка точкой. Заменяющий механизм получается в виде механизма ОАВС, где центр А кривизны профиля кулачка в точке В является центром вращательной пары, в которую соединены криво шип ОА с шатуном АВ\ стержень ВС является в этом механизме коромыслом. Если бы стержень ВС опирался на прямолинейный участок профиля кулачка (фиг. 114), то заменяющий механизм получился бы в другом виде (фиг. 115).
Смотрите также:
| Ременная передача | Кинетостатический расчет плоских механизмов предварительные сведения |
| Проектирование кулачковых механизмов | Определение сил инерции |
