
Оглавление:

Кинематический способ построения линий влияния
- Кинематический Способ построения влиятельной линии Статический метод построения линии влияния основан на принципе возможного смещения, в зависимости от объема работ, которые на нее воздействуют, поэтому для системы, находящейся в равновесном состоянии.、 В любой статически определимой геометрически
неизменной системе степени свободы равны нулю и не допускают движения ее элементов. Таким образом, такая система преобразуется в переменную (механизм с определенной степенью свободы) путем снятия определенной связи, в которой сила рассматривается в ее направлении. Механизм результирующей движущей силы F —
=1 прикладывается к исследуемой силе, механизм которой сообщается Людмила Фирмаль
как можно более бесконечно малыми движениями. На основе принципа возможных перемещений создается равновесное состояние механизма,которое определяется из решения уравнений, полученных неизвестной силой. Рассматриваемая конструкция линий влияния кинематически поддерживает реакцию, изгибающий момент и боковую силу в одной пролетной балке. Линия влияния опорной
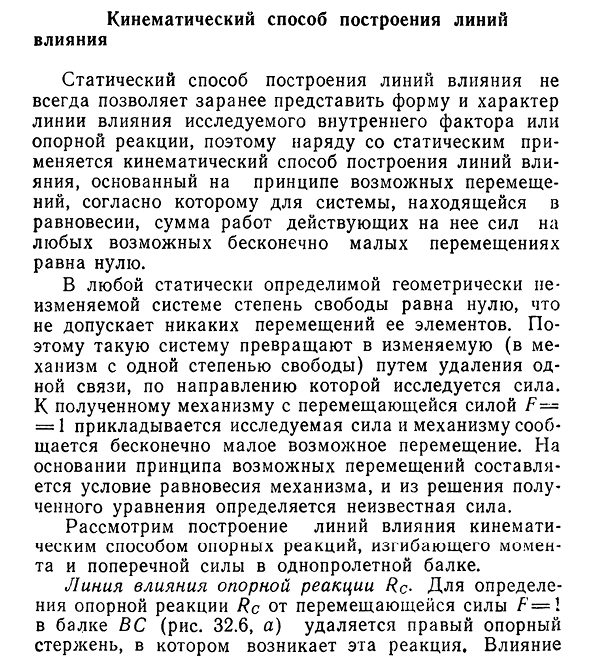
реакции Rc-определить опорную реакцию Rc от движущей силы F=l в пучке BC(рис. 32.6, а) эта реакция возникает при удалении правого опорного стержня. Влияние £ 370 h-g-gttp TSH T Рис 32,7 Шесть. Рис 32,6 qfo Jrv & lL Для других целей см. » l.^ Рис 32.8 Рис. 32.9 Отброшенный стержень на балке заменяется на Rc-секцию (рис.32.6, б). Скажем, Луч в направлении Rc микро движется в направлении BS-соответственно, вертикальная ось движения силы F-1 показана(рис. 32.6, б). Из-за
- малости их перемещений они берутся перпендикулярно к исходному положению балочной пары. Поскольку механизм под действием приложенной к нему силы равен F=l, а опорные реакции Rc и Rb находятся в равновесии, необходимо рассчитать Rc8c-FdF=0 исходя из принципа возможного смещения. В полученной формуле смещение БС является постоянной величиной, так как ее значение задано. Смещение BR-переменная величина, зависящая от положения
движущей силы F=l, Следова- Двадцать четыре* 371 значение эталонной реакции/?< 6f зависит от хода.Тогда 6P=0/?C=0,8 F=8cRc=1 (Рис. 32.6, б). Поскольку 6F представляет собой вертикальную ось вытесняющей силы F=l, то модель ударной линии опорного реакционного участка механизма вытеснения Rc,масштаб ударной линии, построенной в масштабе заданного вытеснения 8s, определяется из равновесного состояния механизма с использованием принципа возможного вытеснения.
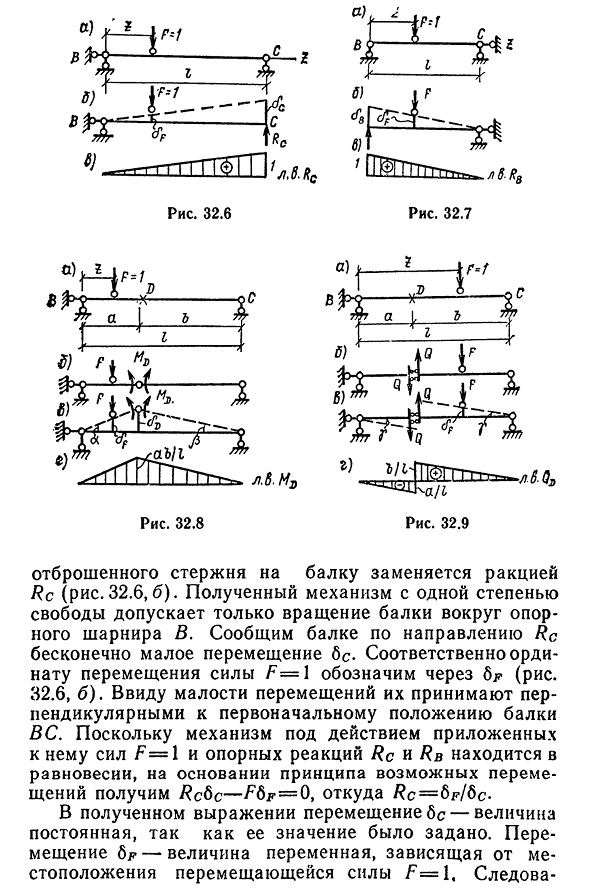
Линия влияния эталонной реакции RB-для определения эталонной реакции RB в Людмила Фирмаль
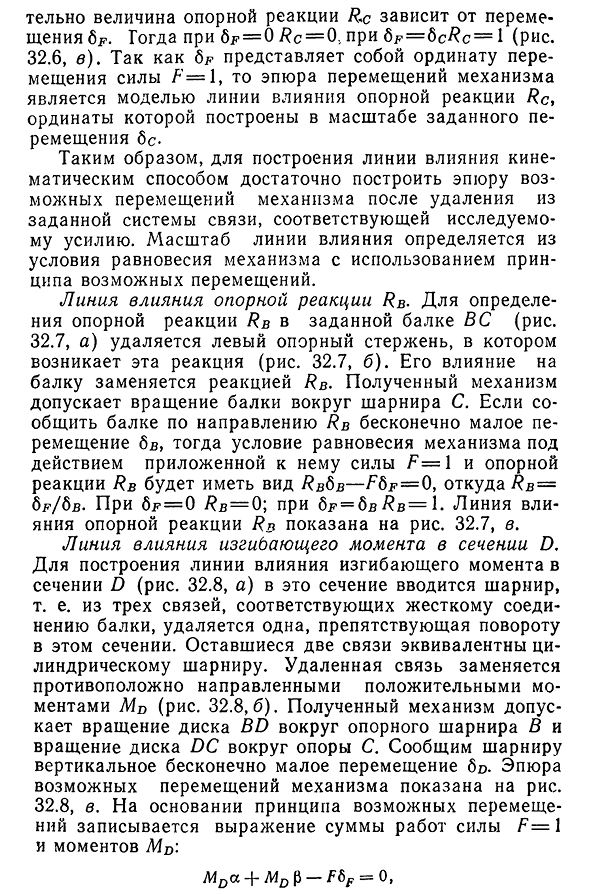
заданном пучке BC(рис. 32.7, а) эта реакция возникает при удалении левого опорного стержня(рис. 32.7, б). Его воздействие на пучок заменяется реакцией RB. Если сказать лучу бесконечно малое направление движения BV RB, то равновесное состояние механизма под действием приложенной к нему силы F=1 и опорная реакция RB равна RB8B-F8f=0 при BG=0/?b=0; 8F=8B RB=1. Также линия влияния эталонной реакции Rn показана на рисунке. 32.7, ст. Линия влияния изгибающего момента в сечении D. Линии, на которые влияет изгибающий момент, могут быть включены в D-член. 32.8, а) в этой секции шарнир является входным, т. е. из трех связей, соответствующих жесткому соединению балки, один
интерференционный поворот в этой секции снимается,остальные два соединения эквивалентны цилиндрическим шарнирам. Удаленные коммуникации сменяются положительными противоположными моментами. 32.8, 6). Полученный механизм допускает вращение диска BD вокруг опорного шарнира B и вращение диска DC вокруг опоры C. назовем минимальное вертикальное перемещение 8D шарниров-график возможного перемещения механизма показан на рисунке. Исходя из принципа возможных перемещений, записывается представление суммы силы f=1 и момента MD:MDa+MD p-F8f=O, 372 из любого места Поскольку углы поворота диска BD и DC бесконечно малы, их значения заменяются соответствующими
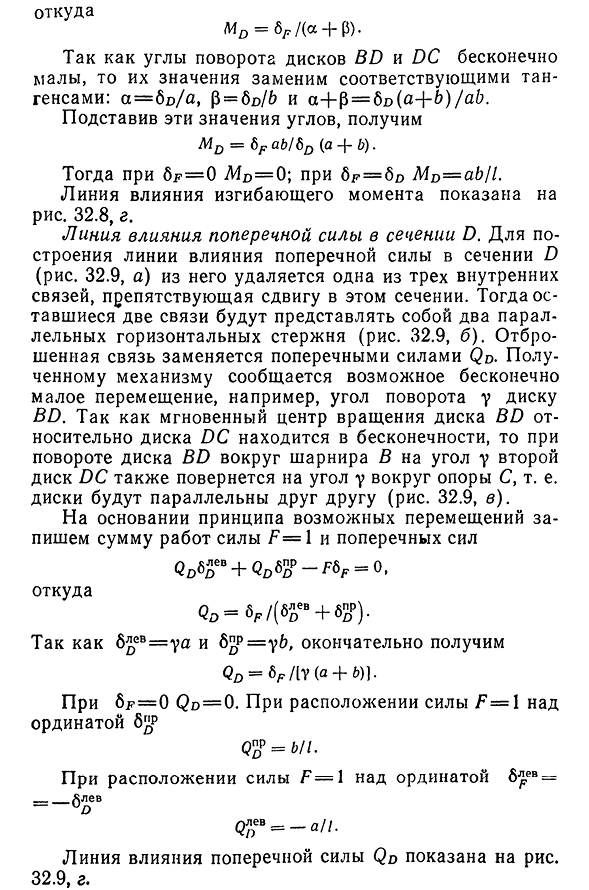
касательными: a=b o/a, 0=6ol>и a+0=6o (A4 -&)/AI-это касательные линии. Итак, 6j?=0AfD=O; 6F = 6D MD = abll. Линия влияния изгибающего момента показана на рисунке. 32,8 г Боковая линия силовых воздействий, в разделе D построить боковую линию силового воздействия в раздел D(фиг. 32.9, а) из него удаляется одно из трех внутренних соединений, препятствующих этому сдвигу секции. После этого оставшиеся два соединения представляют собой два параллельных горизонтальных стержня(рис. 32.9, б). Отброшенные звенья будут заменены поперечной силой Qd-результирующим механизмом, например, возможно микродвижение угла поворота
диска BD, сообщенного BD даже при повороте BD вокруг шарнира на второй приводной угол DC так, что мгновенный центр вращения BD относительно диска DC будет бесконечным, опора 32,. Исходя из принципа возможного смещения, запишите сумму силы f=1 и боковой силы QD6£eB+ -=°>. КТ=СФ/нет. b + ^ ) — &$=Y так как мы наконец-то <???d=M I v («+ *))• В 6f=0Qd=0. При усилии на вертикальное положение F=1 b=P QnJ=b/l. При положении силы F=1 по вертикали b=EV= = — ^EV QpeB= — a//. Линия влияния боковой силы QD показана на рисунке. 32,9 г
Смотрите также:
Примеры решения задач технической механике
| Прогибы при косом изгибе | Линии влияния при узловой передаче нагрузки |
| Расчет рамы на тепловое воздействие | Линии влияния продольных сил в стержнях фермы |
Если вам потребуется помощь по технической механике вы всегда можете написать мне в whatsapp.
