
Оглавление:

Коэффициент полезного действия механизмов
- Механизм эффективности С точки зрения потери энергии, механизм оценивается и сравнивается с точки зрения эффективности. Механическая эффективность механизма G | называется отношением (3.1) полезной работы сопротивления tVnc (сила Rps) к движущей силе работы Wd (сила Rd). Механические потери для преодоления вредного сопротивления определяются соотношением между движущей силой (силой), а не абсолютной величиной (силой) потерянной работы. Эта величина называется коэффициентом потерь механизма: = wW «V Это мера полноты механизма.
С устойчивым движением механизма Или 1 = r | + f. Для всех механизмов эффективность составляет менее 1. Значения эффективности для многих механизмов определены экспериментально. Это также описано в справочнике. Вы можете улучшить эффективность следующими способами: • Снижение кинематических потерь на трение. • Использование механизма при полной нагрузке. • Выбор разумной схемы механизма.
Для многих механизмов эффективность можно рассчитать, зная основные параметры. Людмила Фирмаль
В большинстве случаев механический привод состоит из ряда отдельных механизмов, соединенных вместе для передачи движения последовательно, параллельно или смешанно. Эффективность привода зависит от эффективности каждого механизма и характера его расположения. Рассмотрим определение общей эффективности привода для различных типов соединений в механизме, включенном в привод.
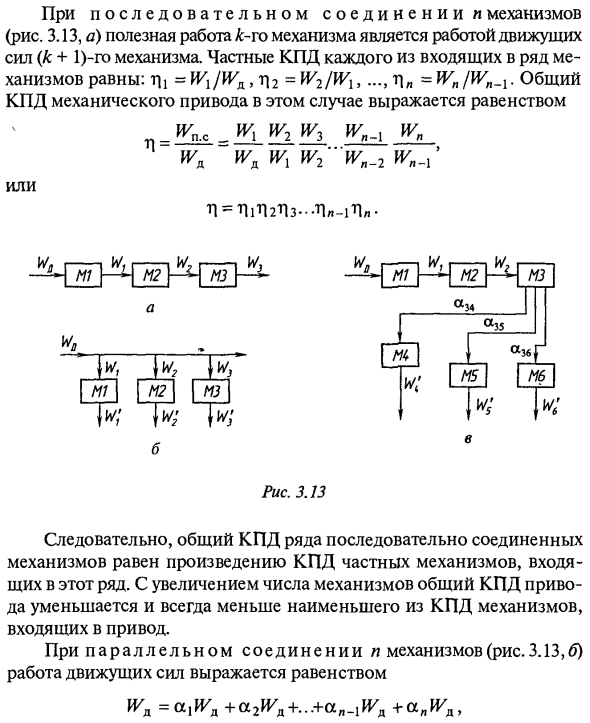
Если n механизмов соединены последовательно (рис. 3.13, а), полезной работой k-го механизма является работа движущей силы (k + 1) -го механизма. Частичная эффективность каждого механизма в серии заключается в следующем: -, M [2 -W2jWX1 …, r | A = Wn / Wn_x. Общая эффективность механического привода в этом случае выражается уравнением W * -1 Wn А / д шх w2 «wn_2 или W1 -K A11 M2 MZ Wn От M1 до M2 «f MH 34 «35 к к К? M1 M2 MZ R шп 36 ф м JV5 M6 ш; к к 5 Ai 3.13 В результате общая эффективность многих последовательно соединенных механизмов равна произведению эффективности частных механизмов, включенных в эту серию.
- По мере увеличения количества механизмов общая эффективность привода уменьшается и всегда ниже минимальной эффективности механизмов, содержащихся в приводе. При параллельном соединении n механизмов (рис. 3.13.6) движущая сила выражается уравнением. Wa = a, WR + a + … + A „h WA + a„ WA, Где ot |, a2 и a — коэффициенты, которые указывают, какая часть работы движущей силы передается первому, второму и последующим механизмам. Следовательно, aj + a2 + a3 + … + a „= 1. Полезная сила сопротивления, действующая на выход соответствующего механизма, равна
K.C = cc ^ dL W (= a2WaT) 2; …; Wi = anW ^ n. Общая эффективность механизма в этом случае определяется следующим образом: L- ———- a, rii + a2r | 2 + … + awri N-механизм смешанного соединения со схемой, показанной на рисунке 3.13, Здесь a34, a35 и a36 — коэффициенты, указывающие, какая часть движущей силы от механизма L / 3 связана с механизмом L / 4, M5yМv. Эффективность механизма и многие другие фактические механизмы обычно устанавливаются или определяются экспериментально.
Смотрите также:
| Приведение масс и моментов инерции | Ошибки механизмов и их деталей |
| Уравнения движения приведенного механизма | Допуски линейных размеров |
