
Оглавление:

Линейные задачи с параметром в правых частях ограничений
- Линейная задача с параметрами справа ограничение Вам нужно найти вектор X = (xx, x29 .. функция z (x) = £ <**, Под ограничениями ηψ Vm = при + tdi% i = 1, 2, …, м \ t * Qt / = 1, 2, Решения этой проблемы могут быть сведены к исследованиям Двойное задание с параметрами в целевой функции: поиск м Минимальное значение функции F (Y) = £] (a, + taj yι м Σβί / ^ ί> c /, / = 1, 2, …, η \ tn 0 (r = 1, 2, …, m). (5)
- Найти границу множества из этой системы неравенств. Псевдо-план оптимальности / = ι ( Максимум я — Копье и Минуту / = J, если xSi> 0 существует. Для всех xn <0; если существует xSi <0; Для всех xc> 0. Следовательно, псевдоплан оптимален для / Г (ана- Логично сделать то же самое для / t, база ASi9 ASt, ..-, A Соответствующий вектор X остается псевдопланом задачи. *
Поскольку расчетное значение Δ,> Q не зависит от параметра /. Людмила Фирмаль
Гадать Кроме того, вектор ASf (Αι) из основ и введен вместо Вектор ab / А. \ Λ. (7) минут <0 \ Xrl) xrk Здесь предполагается, что хотя бы один Χη <0. В противном случае проблема не может быть решена. При переходе на новую инфраструктуру компоненты инфраструктуры Псевдопланы трансформируются по формуле полного исключения. xSi (t) = xs. + tx4 = xh + txSi- £ (xSr + tx «Sr), iφ гк ~, V ** ·· ~ «x \ x \ (p) Xrk XRK.
Оценка псевдоплана пересчитывается по формуле Δ, = Δ, -5th Δ *, / = 1,2 …., с. (9) гк Указывает, что новый псевдоплан оптимален для /> t. Фактически, подставьте значение / в (6) в уравнение (8). Из уравнения (8) новый псевдоплан χ имеет вид хз х х xSr It) Только оптимально при условиях = — + / -> 0. Xrk * rk Учитывая, что x2 * <0, * s * <0, получаем от последнего xsr- Неравенство t> η = t. хз г
- Далее предположим, что f 0, Ограничения вопроса (1) — (3) противоречивы. В противном случае Выведите вектор ASr из базы и получите новый псевдоплан. Левый конец набора оптимизации — t. Далее возьмем второй случай. Далее это Отрицательный компонент xs (tB) = xs. + / HxSi, для всех х £ ф> 0.
Например, xSr (tH) = xSr + UxSf <0 и все xri> 0. Кроме того, если xSf = 0, проблема не может быть решена в целом Числовая ось. Если x $ r <0, проблема t> t \ = не может быть решена = —Если Xsrfxsr9 и g £ r> 0, ί <), / = 1, 2, 3, 4. Заполните симплексную таблицу и введите столбец вместо одного столбца A0 A0 и Aq.
Реализуй неотрицательность по симплексному правилу Оценка Δ. = Zf-s. (Вкладка 0; 1). Людмила Фирмаль
В таблице. 1, базовый ASA2 и соответствующий план X * = (0; G 1Ί 4 + /; 2 -} — 4 /; 0). Большая часть его оптимальности я- # оо | где T = oof, потому что все x «> 0. Затем вектор A3 выводится из базиса и вводится вектор A ^ 9. • ίΜ * ■ 3 часа мм — = — = — ct = 3 Исключение выбранного элемента управления χ3ι- *, в результате Tab.
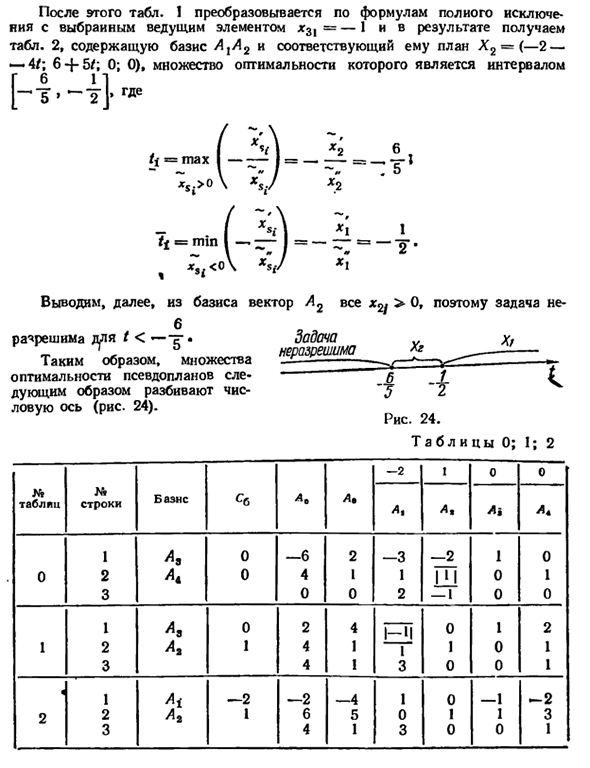
План X2 = (- 2- -4 /; 6 + 5f; 0; 0) Оптимальным является интервал G5 ‘^} где max | —-—! = —! =, _— Я Кроме того, чтобы вывести вектор A2 все x2> 0 из базиса, проблема б Решение с t <α — £ — проблема νχ, ^ «L ° нерастворим ** ** — Поэтому установите -уу ^ — * — ^ ^ Псевдо-план оптимальности jj «77.ί Разбейте числа следующим образом: «~ 2 Рыболовный вал (Рисунок 24). ‘Рисунок 24.
Смотрите также:
Решение задач по математическому программированию
| Параметрическое линейное программирование | Динамическое программирование |
| Линейные задачи с параметром в целевой функции | Стохастическое программирование. Постановка задачи |
