
Оглавление:

Моменты инерции относительно осей, проходящих через заданную точку
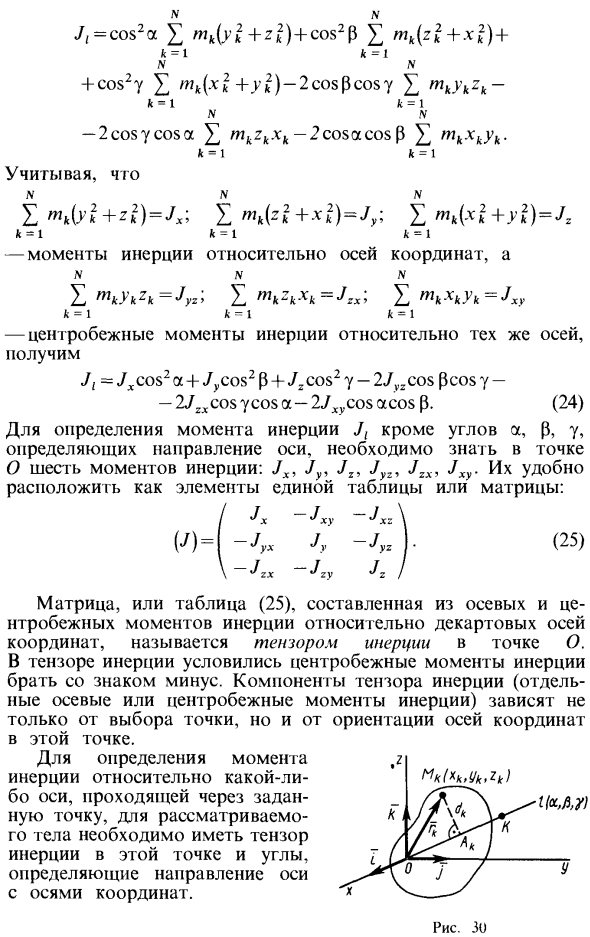
- Выбирает декартову систему координат Oxyz в указанной точке O. Ось 01 образует углы a, p и y с осями координат (рисунок 30). Определяя момент инерции вокруг оси 01, (20) или для твердого тела J = jd2dm. Далее используется определение (20). Твердое тело считается разделенным на N мелких частей в виде точек. Из прямоугольного треугольника получается OAkMk ) 2, (21) Где rk = xk + yk + zk, xk, yk, zk — координаты точки Mk.
Вместе с теорией аппроксимации добавляется теория регулярной прецессии и движения высокоскоростного вращающегося гироскопа под действием силы тяжести, что позволяет обосновать предположения теории аппроксимации. Людмила Фирмаль
Отрезок OAk — это проекция вектора радиуса rk = xki + Yk / + zklc на ось 01. Чтобы получить проекцию вектора rk на ось 01, нам нужно умножить единичный вектор этой оси T ° = icosa + / cosP + £ cosy на скаляр. У нас есть OAk = rkT ° = (xki + yj + zk £) (Fcosa + ycosp + ^ cosy) = = XjCosa + ykcosp + Z | kcosy. (22) (21) Умножьте на gk, выраженную в координатах точки Mk, в единицах вида cos2a + cos2p + cos2y = 1, используя значение OAK (22) dk = (* + yl + z *) (cos2a + cos2P + cos2y) — — (XjCosa + j’jCosP + zjCosy) ^^ * + z *) cos2a + (zk + x *) cos2p ++ (x * + y «) cos2y-2ytzkcospcosy-2zkxkcosycosa- -2xkykcosacosp. (23).
- Подставляя (23) в (20) и беря косинус угла, который превышает знак суммы, Jl = cx> s2a Y, mk (yl + zl) + cos2V £ m * (z * + x »2) + cos2 y ^ mk (xl + yi) -2 cos P cos y mkyk zk- -cos a £ mkzkxk и 2 cos-2cosacosp £ mkxkyk. Учитывая, что Я «. (» + ■ -. =) — • /. : I-Ф1ki ~ .t «i -I n’H -Момент инерции относительно координатных осей Y mky ^ k = J, z; Y. mkzkxk = JIX; Y, mkxkyk = JIf -Центробежный момент инерции относительно одной оси, Jt ~ Jxcos2 a + J ,, cos2 p + Jz cos2у-2Jyxcos pcos y— -2Jzxcosycosa — 2JXJ, cosacosp. (24).
Чтобы определить моменты инерции J, помимо углов a, P и y, определяющих направление оси, необходимо знать шесть моментов инерции Jx, Jy, Jx, Jyz, Jxx, Jxy в точке O. Их удобно расположить как единый элемент таблицы или матрицы. / Jx -Jxy -J „\ (■ /) = -Lx L -Az • (25) -Lu L / Матрица или таблица (25), состоящая из осевых и центробежных моментов инерции для декартовых осей, называется тензором инерции в точке O. Тензор инерции согласился принять отрицательный момент инерции.
Потенциальное силовое поле и силовая функция силовое поле определяется как точка, в которой определенная сила действует на материальную точку, в зависимости от координат точки и времени. Людмила Фирмаль
Компонент тензора инерции (индивидуальное осевое направление или центробежный момент инерции) зависит не только от выбора точки, но и от направления осей координат в этой точке. Чтобы определить момент инерции вокруг оси, проходящей через данную точку, рассматриваемому телу требуется тензор инерции под углом, который определяет направление оси в этой точке и ось координат. Рисунок Jeu
Смотрите также:
Задачи по теоретической механике
| Круглый цилиндр | Эллипсоид инерции |
| Шар | Свойства главных осей инерции |
