
Оглавление:

Обруч
- Представьте себе тяжелое твердое тело. Выполняются следующие условия: тело на 1 заканчивается ребром в виде окружности K радиуса A. Центр тяжести G тела на 2 совпадает с центром K окружности, а эллипс инерции G на 3 центра тяжести представляет собой сфероид с центром на Gz, перпендикулярный плоскости окружности. Кроме того, предположим, что это тело заставляет его вращаться, не скользя по неподвижной горизонтальной плоскости II. Введение гауссовой гипергеометрической функции в качестве аналитического элемента может свести. Интеграл этой задачи механики к quadrature. В этой ситуации, в частности, есть место для перемещения обруча.
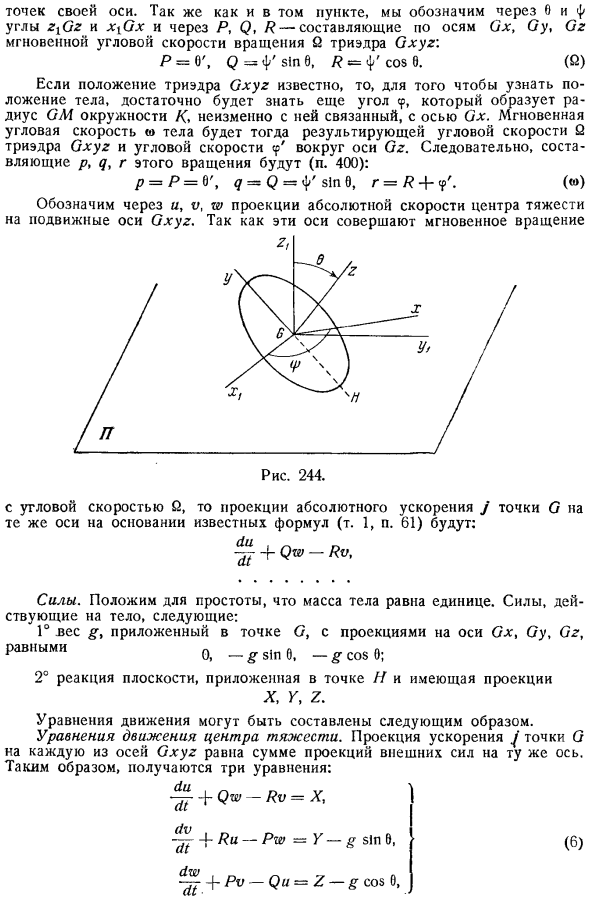
Пусть H точка контакта окружности K с неподвижной поверхностью рис. 244. для изучения движения объекта вокруг центра тяжести G сначала используют 3 оси Gx , Gyx, Gz и ось Gz в постоянном направлении, а затем направляют их вертикально вверх. Затем используйте следующие 3 подвижные оси.1 ось GZ перпендикулярна плоскости окружности K , а ось GX перпендикулярна плоскости zGzj. Ось 3 Gy вертикальная bc Gx горизонтальный диаметр окружности A. ось Gy это линия наибольшего восходящего наклона плоскости окружности. Точка H находится в отрицательной части основания Gy. Эти оси движения идентичны тем, которые используются в разделе 1 для изучения движения вращающегося тела, закрепленного в одном. 400.
Может случиться, что для Т получится отрицательное значение. В этом случае элемент 8Х будет испытывать сжатие, а не растяжение. Людмила Фирмаль
Corteweg и Аппель, Rendlcontl дель клуб matem tico Ди Палермо, август 1899, вып. XIV, стр. Увидеть 1 7. Суть его axis. As в этом пункте показаны 2 трехгранные составляющие вдоль оси Gx, Gy, Gz мгновенной угловой скорости вращения gxz под углами zlGz и xiGx и P, Q, R 6 и Phi. Р = 0, = Ф 81pv, ф = ф, потому что.9. 2 Если известно положение трехгранника Gxyz, то для нахождения положения тела достаточно знать угол G. угол 9 образует радиус GM окружности K.
Мгновенная угловая скорость в теле gxyz будет равна трехграннику результирующей угловой скорости 2 и угловой скорости tp вокруг оси GZ. Таким образом, компоненты Р, Q, оборотов п. 400. м = м = грех в, р = р + ф Если угловая скорость равна 2, то известная формула Т. 1, с. 61, основанная на проекции абсолютного ускорения точки G на ту же ось J, выглядит следующим образом: + Кя РВ Сила. Для простоты предположим, что вес единичен.
Силы, действующие на тело, являются: Масса g g slnO, где проекция на ось Gx, Gy, Gz применяется в точке G, равной 0. 1 г г слно, г косо 2 реакция плоскости с проекцией, приложенной в точке H X, Y, Z Уравнение движения можно построить следующим образом: Уравнение движения центра тяжести. Проекция ускорения точки O каждой оси gxz равна сумме проекций внешних сил на одну и ту же axis. So мы получаем следующие 3 уравнения: +Ру ПВ = г г Sin в Ф + ПВ КУ = з ffcos9 Вам нужно поставить P = P, Q = 4 Р = м КГН 9. Уравнение движения вокруг центра тяжести. A, B и C указывают момент инерции обруча для оси Gxyz.
Относительное движение вокруг точки b, будем считать, что вектор ba является главным моментом импульса относительно точки G. этот вектор Ge имеет проекцию на ось Gxyz. =Год С другой стороны, основным моментом внешней силы относительно G является момент веса, равный нулю, и момент реакции, приложенный к точке H в координатах 0, a, 0 X, y. Z .Поэтому главный момент GS предсказывает время реакции для оси Gxyz. ЗХ = аз, Св = 0, С2 = топор.
Чтобы представить теорему о моменте в относительном движении вокруг точки b, запишем, что относительная скорость точки o относительно оси bx1y1r1 в определенном направлении через точку b равна вектору GS. In таким образом, получается уравнение пункт 386. И P = p, Q = q, R = q ctg 9 А Ф кр р р КГН 0 м = в З, А СГ Ак КТГ 9 Р = 0,С = топор. 7 Геометрический conditions. To выразив, что окружность K катится по плоскости, необходимо описать, что скорость касательной точки H равна нулю.
- Эта скорость является геометрической суммой скорости u, v, w поступательного движения оси 6xiyt i, которая равна скорости точки b и является скоростью, вызванной вращением вокруг точки B. Эта последняя скорость включает в себя qz yy вдоль оси Gxyz … существуют компоненты, равные x, y. d координаты точки H 0, a, 0. Так как мы написали, что проекция скорости точки H на ось Gxyz равна нулю, то получим следующее уравнение: 8 Полусистема из 6 уравнений 6 и 7, которые определяют 6 p, , X, r, Z, находя из этих уравнений и подставляя их в уравнение 6. Исключите из них X, Y, Z и функцию t 9, Вы получите 3 уравнения, которые определяют.
Таким образом, вы получаете 2 уравнения, которые помогут вам определить q и r функции 0.In факт, замените эти p на: коэффициент dt исчезает, и мы получаем 2 уравнения + q2 ae9 = 0 С СГ + р р ctg9 = 0 П образуют систему линейных однородных уравнений, определяющую q и функцию 0.Найдите q из первого уравнения и введите 2 е уравнение, чтобы получить 2 е уравнение для определения r РГД 12 Из этого уравнения r определяется функцией 0.Первое уравнение 11 помогает определить q.
Если эту формулу применить к случаю винтовой линии, то сразу видно, что Т всюду равно нулю. Поэтому каждая из точек цепи движется так, как если бы она была изолирована. Людмила Фирмаль
Присоедините уравнение энергии tP + v2 + r 8 A p8 + q2 4 Cr8 = IgA sin 9 4 ft Используйте квадратуру, чтобы получить функцию t до 9.Правая часть этого уравнения представляет собой двойную работу тяжести gr C указывает координаты греха 9 Интеграл по формуле 12.Использование подстановок Формула 12 3 РФР Са2 u 2 ID 4L С4 в Это уравнение гипергеометрического ряда Гаусса. 1 j го 1, .Я Сд3 1 2 2 ПРОМАЛЬП ПРОМАЛЬП 4А с + А8 Общее интегрирование уравнений Гаусса собрание сочинений, т. Ихъ. P. 210 П Б, г, х + 1 ТФ а + 1 г, + 1 7,2 т, х Мы получаем вопрос 2 Любой выражает q в виде гипергеометрического ряда. Наконец, из уравнения M i p = энергия, которая является ква Драма.
Для закрепления уравнения 12 можно также использовать замены, указанные Кортевегом Korte weg, Rendiconti del Circolo di Palermo, t. XIV, p. 7. фактически, подставляя это уравнение Преобразуйте его в: Новый взгляд 13 = 1 20 Посмотреть на него. В этом виде уравнения идентифицируются гипергеометрическими уравнениями. Следовательно, частичный Интеграл. , 1, 0 Б Предположим непрерывно для этого интеграла = 1 1 х Получаем общий интеграл по формуле 10 2 особых случая: 8 Марта Такие значения не ограничены Это решение достичь значения приближается. Во первых, показать m, тот же угол движения 0 Вы можете взять оба значения, но только r не всегда zero.
Замена x происходит, когда V не равно нулю. Кроме того, если он отличается от нуля, то замена x = 1 будет бесконечной величиной r, так как аргументы ряда будут положительными единицами, а + m будет равно нулю. Очевидно, что бесконечное значение r соответствует бесконечному значению кинетической энергии, и последняя не может принять такое значение. Во вторых, например 9, чтобы принять значение 9 = 0, это указывает на то, что константа X должна быть равна нулю. Итак, в этом случае выражение в r будет иметь более простую форму, то есть следующее: Р = Р Ф А, , 1.
Очевидно, что движение, угол которого 9 принимает значение равное 0, может осуществляться только относительно обруча, когда все тело сосредоточено в одной плоскости Korteweg, loc. Белоручка. Y Твердые координаты по Study. In во всех предыдущих приложениях мы определяли положение объектов в пространстве по 6 независимым координатам 5, q, C, 9, p, F. В 1891 году исследование Mathematische Annalen, v. XXXIX показало 8 однородных систем координат, Соединенных билинейными соотношениями для определения положения тела. Исследование было опубликовано в его книге Динамо геометрия Geometrie der Dynamen, 1903, pp. In 580 583 снова вернулся к этой теории.
Информация о этой системе координат также может быть найден в статье Брай cara 1910.1 Мон, новые Анналес де Math6matiques, Рю де Соссюр, Этюд аналитики, г н Статья аренды де Соссюр. При исследовании его системы координат рассчитывалась кинетическая энергия твердых тел. Journal of Jordan Jordan, v. см.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
