
Оглавление:

Общая формула для определения перемещений. метод мора
- Д. Б. ¶О. МЕТОД МОРА Рассмотрим вначале произвольную плоскую стержневую систему(балку, раму, ферму и т. п.(рис), нагруженную заданными силами р (рис. 370,½). Это домашняя страница по умолчанию для вашего нового хостинга Nexcess. Введем вспомогателное состояние(рис. 370,б), представляющее собой заданную систему, нагруженную лишь одной единичной силой(обобщенной)Х£-1,приложенной в той же точке и тя по тому же направлению, по которому надлежит разыскать перемещение
Усилия в произвольном сечении вспомогательного состояния, вызванные действием единичной силы Х£-1,обозначим через Л1(, дя, НТ. Применим для начало возможных перемещений состояния вспомогательного, принимая в качестве возможных действительные перемещения заданной системы. (13.33)), + 03.43) 3, 6, 8. 373Выражение(13.43). ¶(13.32),¶ =2е+2е+2е г ’ генетически Пи-(, Пи-44> С $ С В обем случае дествия сил(см. рис. 361.);: ы х + ¶ *. J. 1″ ¾ № 2gf ’ эф ) Ееф/EJz1 ДС (13.45)Индексы уу З в формуле(13.45)обозначают главные оси, индекс»кр»—крутящий момент. Φ, φ (13.45). (13.43)ο (13.45)
ε. Определение перемещений по этим формулам часто называют Людмила Фирмаль
методом Мора. Отметим, что метод Мора является самым общим методом определения перемещений стержневых систем. Его значение особенно велико при расчете статически неопределим систем. В большинстве случаев при определении перемещений в балках, рамах и арках можно пренебречь влиянием продольных деформаций и деформаций сдвига, учитывая лишь перемещения, которые вызываются изгибом и кручением. (13.43)〉 (13.46) 374при пространственом нагруении, согласнормуле(13.45), Л’р ЭВН _с С MfAlpds+J77- с +Jf m G M d s s с. (13.47) ¶ < 7 ХТЛ; Zttfl • 1º? д *
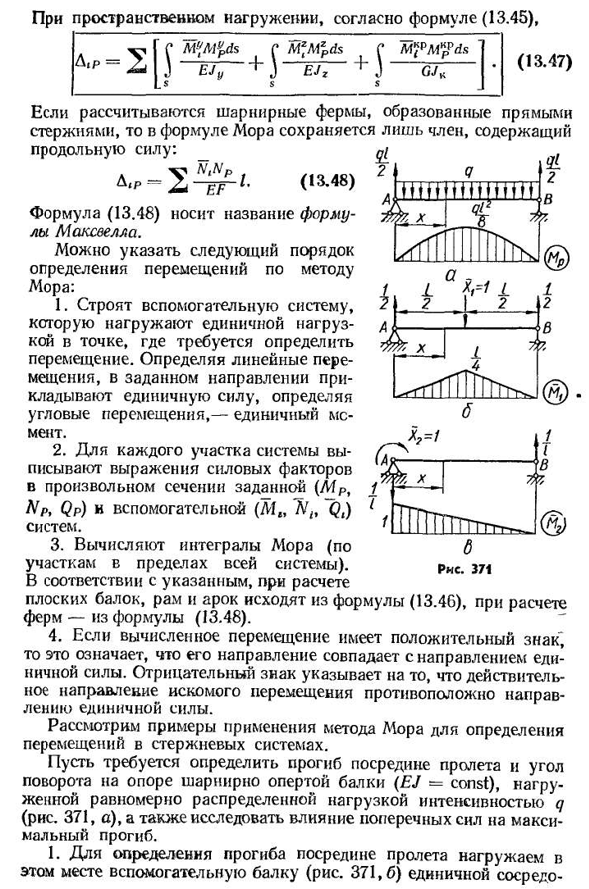
÷Генетический Рис. Триста семьдесят один Если рассчитываются шарнирные фермы, образованные прямыми стержнями, то в формуле Мора сохраняется лишь член, содержащий продольную силу: < , φ8) (13.48). 1. Строят вспомогательную систему, которую нагружают единичной нагрузкой в точке, где требуется определить перемещение. Определяя линейные перемещения, в заданном направлении прикладывают единичную силу, определяя угловые перемещения,—единичный момент. 2. Для каждого участка системы выписывают выражения силовых факторов в произвольном сечении заданной(ЛТР, П, Пи, Qп)и вспомогательной(Л1в, Кварты)систем. 3.
- Вычисляют интегралы мора (по участкам в пределах всей системы) Φ, φ, φ (13.46), φ-φ(13.48). 4. Если вычисленное перемещение имеет положительный знак, то это означает, что его направление совпадает с направлением единичной силы. Отрицательный знак указывает на то, что действительное направление искомого перемещения противоположно направлению единичной силы. Рассмотрим примеры применения метода Мора для определения перемещений в стержневых системах. √(Константной), в(√. Совет Европейского сообщества, в частности, и Совет Европейского Союза, в другой части, подписали меморандум о взаимопонимании между Европейским сообществом и его государствами-членами, в частности Республикой Болгарией, в другой части. 1. Для определения прогиба посредине пролета нагруаем втом месте вспомогателну балку(рис. (371,6))¶-
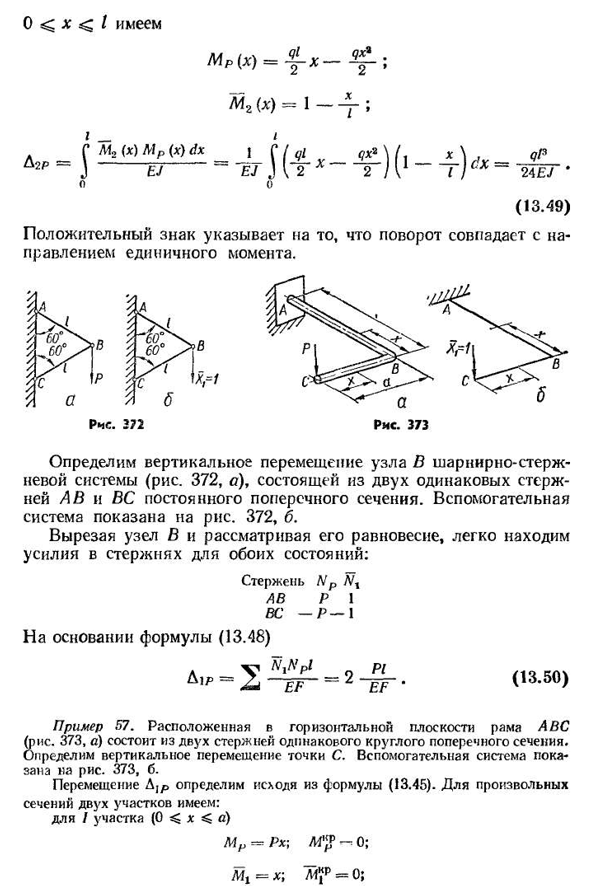
375≤d. o. b.≤ Учитвая симетриփ, получим Пять. -ЗМ Q л\нет Учтем влияние касательных напряжений на искомый прогиб, предполагая, что балка имеет прямоугольное сечение. ≤0< На основании равенства (13.43)прогиб, вызванный действием поперечных сил, 2qt2 5EF’ При этом учтено, что коэффициент формы для прямоугольного сечения 1,2; Враения Суммируя 3 2 (1+½)~ £ 8′ для перемеееени, наодим, что л 5. 2QP5Л1 384 не 5ЕЕ-384 Π, π, π-π — = = π0, 026. Следовательно, прогиб, вызванный поперечной силой, составляет менее3%прогиба, вызванного изгибающими моментами. 2. Для определения угла поворота опорного сечения вспомогателну балку нагруаем единичн моментом(рис. 371,½). При 376. (13.49) Положительный знак указывает на то, что поворот совпадает с направлением единичного момента. Определим вертикальное перемещение узла В шарнирно-стержневой системы(рис. 372, а), состоящей из двух одинаковых стержней ав и вс постоянного поперечного сечения.
Вспомогателная система показана на рис. 372, ¿. Вырезая узел В и рассматривая его Людмила Фирмаль
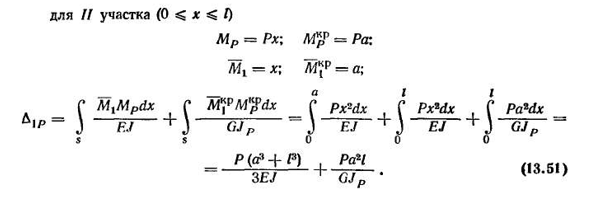
равновесие, легко находим усилия в стержнях для обоих состояний: Стерен НП АВ Р1 ВС-Р — \ На основаниииормул. (13.48)) (13.50) № 57. Располовиченная в плоскости горизонталнович рама АВС(рис. 373, а) состоит из двух стержней одинакового круглого поперечного сечения. Определим вертикалное перемемеение С точки. Вспомогателная система показана на рис. 373, τ Перемееение Д1Р определим изормул исодя. (13.45). Для произволн сечени дву участков имем: для/участка(0<а)для второго участка(0<х<з) Мп = РХ; МТ=х; с Mimindx не З. М. генетически ДХ п м генетически + J S3 7J с О = Похлопывание /*÷=Ля-, К Px2dx Один. О ¶(&+? ) + Я, Ф РХ * ДХ+}~ Ноль. № В ©Pa2dx Р^ Четыре. Шапка (13.51))
Смотрите также:
| Применение начала возможных перемещений к упругим системам | Перемещения, вызванные действием температуры |
| Теоремы о взаимности работ и перемещений | Вычисление интегралов мора по способу верещагина |
