
Оглавление:

Перемещения, вызванные действием температуры
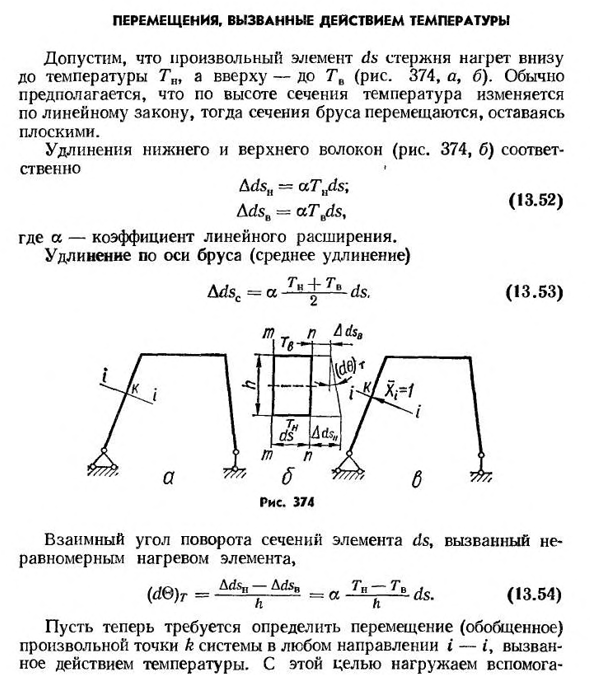
- Смещение из-за влияния температуры Предположим, что любой элемент DS стержня нагревается’до температуры T’, а вверху-до 7(Рис. 374, а, б). Обычно высота поперечного сечения изменяется по линейному закону, тогда поперечное сечение балки считается
плоским. Удлинение нижних и верхних волокон(рис. 374, Б) соответственно Реклама., В.=.ds; d s. — » T A0 N>0 D/G=2^a7g,(13.57) T-4-T Где T= — n^ — b-температура на оси стержня, постоянная по его длине. Агрегат делается на всех полюсах фермы.
Предыдущий знак второго Людмила Фирмаль
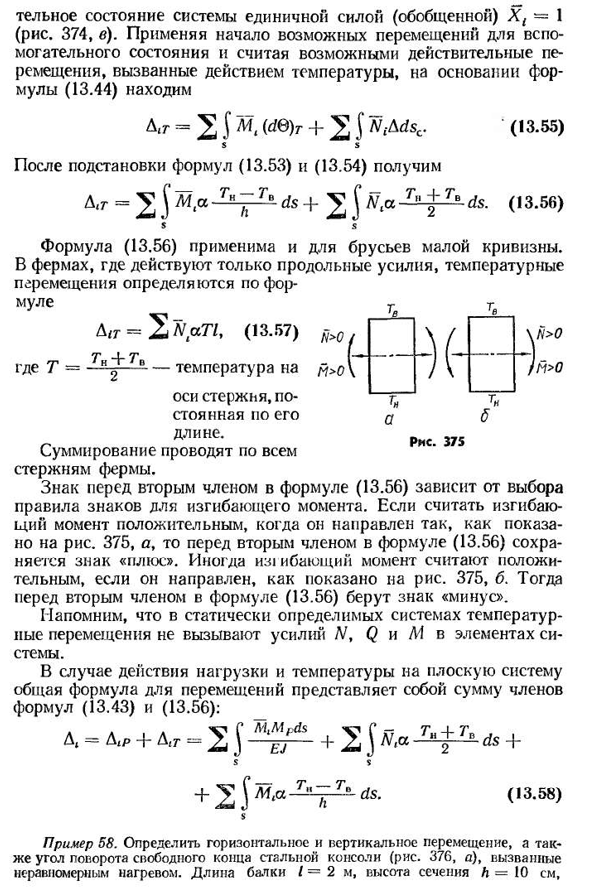
члена формулы (13.56) зависит от выбора знака правила изгибающего момента. Когда изгибающий момент считается положительным, он направлен так, как показано на рисунке. 375, а перед вторым членом уравнения (13.56) сохраняется знак плюс. Иногда крутящий
момент положительный, если на фиг. 375, б. тогда перед вторым членом в уравнении (13.56) возьмем знак «минус». Напомним, что в статически определимой системе температурное смещение не вызывает силы l/, Q, M в элементах системы. В случае действия
- нагрузки и температуры на плоскую систему общая формула для перемещения представляет собой сумму членов формул (13.43) и (13.56): Л Л И Л в Ф MtMpds=д, р+д(г=Дж—+ с — ч — ±ГВ ДС+ $ Д а д ы С + (13.58) Пример 58. Определите горизонтальные и вертикальные перемещения, а также угол поворота свободного конца стальной
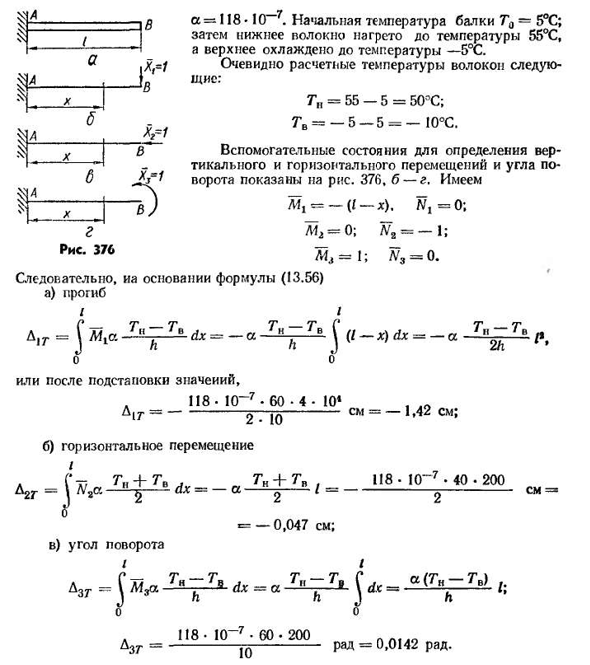
консоли(рис. 376, а) вызвано неравномерным нагревом. Длина балки I=2 м, высота сечения h=10 см, Триста семьдесят девять/ — Но ИА, я Икс б L=1 Икс В б a=s118-10. Начальная температура Луча Go составляет 5°C, затем нижние волокна нагреваются до температуры 55 ° C, а верхние волокна охлаждаются до температуры −5 ° C. Очевидно, что расчетная температура волокна выглядит следующим образом: 7Ч=55-5=50°С; При 7V= — 5-5=-10°C
на рисунке показано вспомогательное состояние для определения Людмила Фирмаль
вертикальных и горизонтальных перемещений и угла поворота. 376, Б-г.(- х), Н1=0; М Два. =0; Jv2= = −1; I=1;^3=O. Таким образом, исходя из Формулы (13.56), а) прогиб Или после замены значения, Четыре. 118- 10~7 • 60 ■ 4 — 10* L(G——————-2~10 см—1.42 см; B) горизонтальное движение =. Вт-м—ч, г-72-40 — 200 см-0.047 см; АЗ г C) угол поворота г н ГН-ДХ=т» — т Отчет /; Ага.
Смотрите также:
