
Оглавление:

Общий случай движения свободного твердого тела
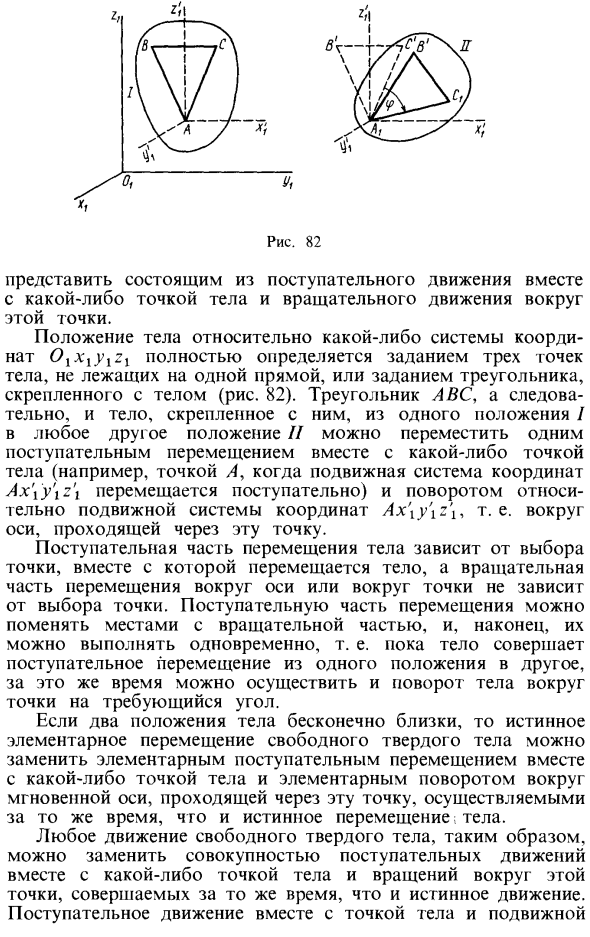
- Разложение свободного движения твердого тела на перемещение и вращение Рассмотрим общее движение свободного твердого тела, то есть объекта с 6 степенями свободы. Наиболее распространенным движением свободного твердого тела является На рисунке 82 показано, что оно состоит из поступательного движения с любой точкой на теле и вращательного движения вокруг этой точки. Положение тела относительно системы координат O1x1u121 полностью определяется путем указания трех точек тела, которые не находятся на одной прямой линии, или путем указания треугольника, прикрепленного к телу (рисунок 82).
Треугольник ABC и связанное с ним тело можно перевести одним переводом вместе с любой точкой на теле из одного положения I в другое (например, точка A, когда перемещается система координат перемещения) Вы можете двигаться, вращая движущуюся систему координат Hxijizi, то есть вокруг оси, проходящей через эту точку. Поступательная часть движения тела зависит от выбора точки, в которой перемещается тело, а вращательная часть движения вокруг оси или точки не зависит от выбора точки. Поступательная часть смещения может быть заменена вращающейся частью, и, наконец, они могут выполняться одновременно.
Следовательно, для существования возможной диаграммы равновесия с определенной волной, если давление T меньше этого предела, единственной возможной диаграммой равновесия должна быть прямая линия. Людмила Фирмаль
Это означает, что вы можете вращать тело вокруг точки на требуемый угол при перемещении из одного положения в другое. Если два положения тела близки к бесконечности, истинное базовое движение свободного твердого тела заменяется базовым поступательным движением с базовым вращением вокруг любой точки тела и мгновенной оси, проходящей через эту точку. Он выполняется одновременно с настоящим движением. Таким образом, свободные движения твердого тела могут быть заменены серией поступательных движений с точкой тела, которая работает одновременно с истинным движением и вращением вокруг этой точки.
Перевод и движение по точкам тела Система координат Ax’iy’tZ’i является переносным движением, а движение тела относительно этой движущейся системы координат представляет собой вращение вокруг мгновенной оси, которая проходит через эту точку движения тела в каждый момент и является относительным. Это движение. Таким образом, движение свободного твердого тела может состоять из поступательного движения с движущейся системой координат и сферического движения, связанного с этой системой координат. Для относительного сферического движения можно ввести угловую скорость и угловое ускорение.
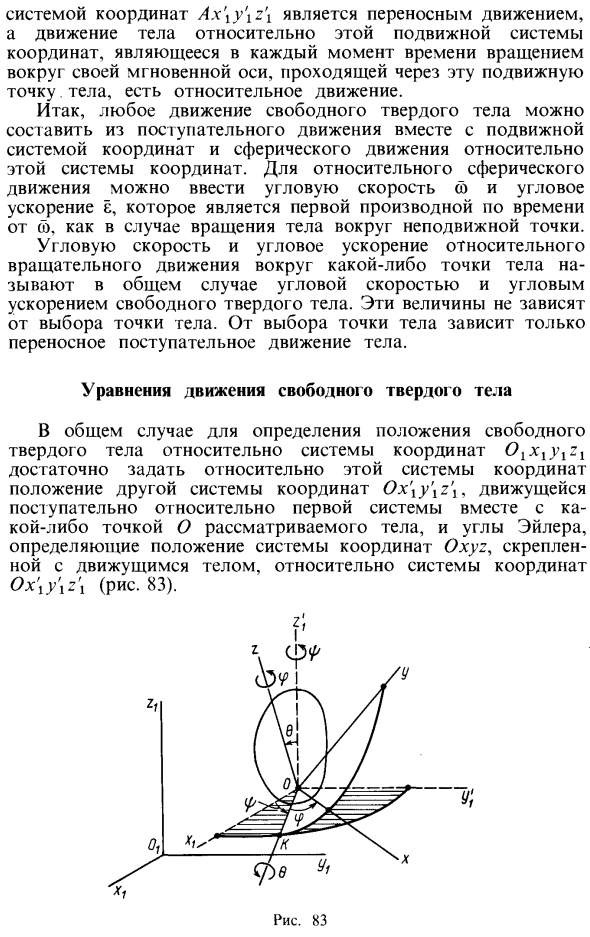
Это первая производная по времени от ©, как в случае вращения объекта вокруг фиксированной точки. Угловую скорость и ускорение относительного вращательного движения вокруг любой точки на теле обычно называют угловой скоростью и ускорением свободного твердого тела. Эти значения не зависят от выбора точки на теле. Только поступательное движение тела зависит от выбора точек на теле. Уравнение движения свободного твердого тела В общем случае, чтобы определить положение свободного твердого тела относительно системы координат Oixlylzi, задайте положение другой системы координат Ox’ij’iZi относительно этой системы координат и первой системы вместе с точкой O с рассматриваемым объектом.
- Для системы координат Ox’iy’iz’i достаточно системы координат Oxyz, связанной с движущимся телом (рис. 83). Для простоты будем считать, что оси Ox \, Oy \, Oz \ параллельны осям Otxlt Olyl, Olzl соответственно. Следовательно, положение свободного твердого тела относительно системы координат полностью определяется, когда: В связи с этой системой координаты точки O объекта как единой функции времени и движущейся системы координат Oxyz закреплены за движущимся телом относительно системы координат Ox \ y \ z, которая переводится вместе с точкой O объекта Укажите угол Эйлера. —0-LI: ♦ — /. (‘); • — /, (* Ф ”ЛИ (, О | Уравнение (20) является уравнением движения свободного твердого тела в случае общего движения.
Есть шесть из этих уравнений. Другими словами, это то же самое, что и степень свободы свободного тела. Первые три уравнения (20) определяют подвижное движение тела вдоль точки О, а вторые три уравнения определяют вращательное движение вокруг этой точки. Первые три уравнения для движения свободного твердого тела зависят от выбора точки объекта O. Последние три уравнения (углы Эйлера) не зависят от выбора точки O, в которой учитывается вращение объекта.
Однако если снаряд сферический и не вращается, то результат получается в вертикальной плоскости, включающей скорость центроида, а траектория этой точки плоская из-за симметрии. Людмила Фирмаль
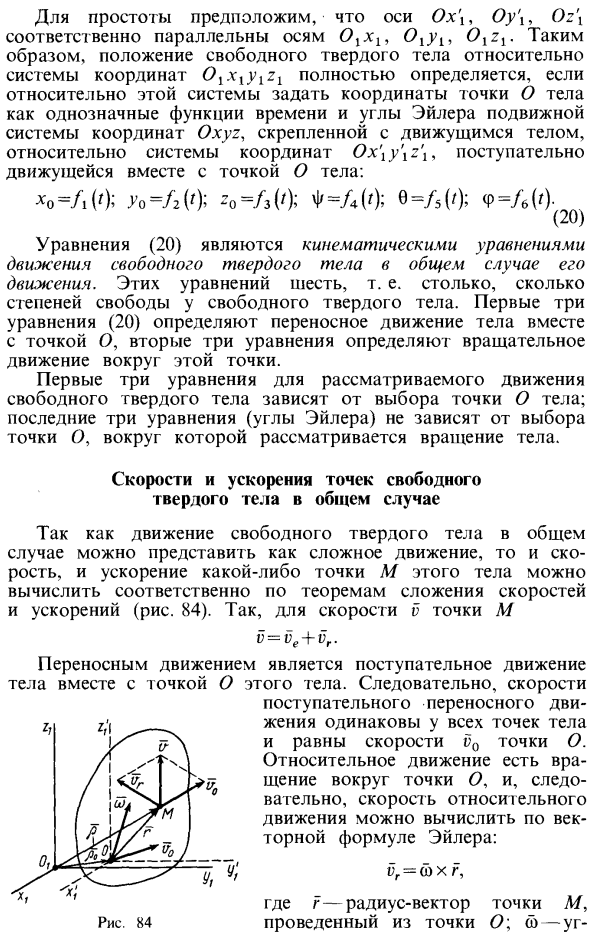
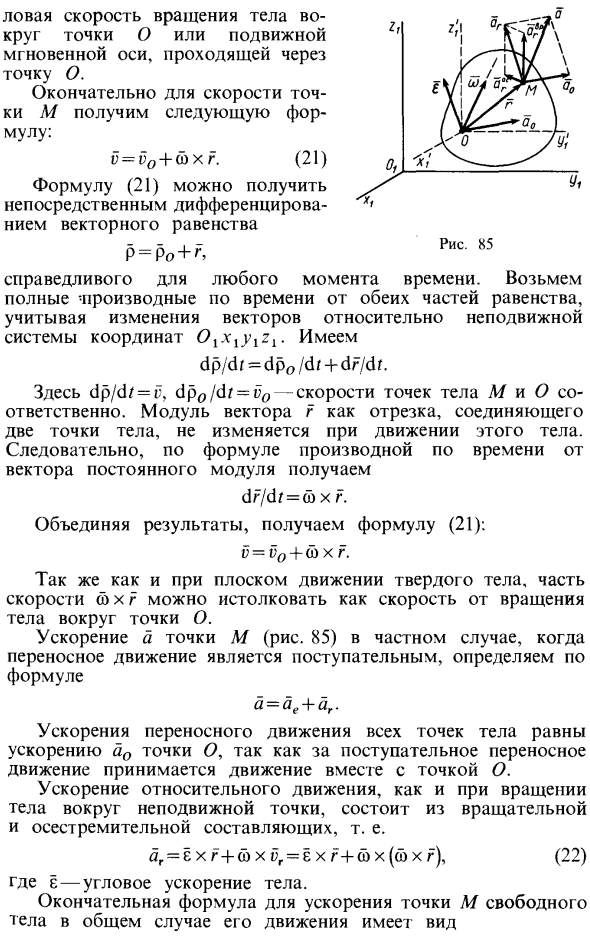
Скорость и ускорение свободной жесткой точки в общем случае Поскольку движение свободного твердого тела в общем случае может быть выражено как сложное движение, как скорость, так и ускорение в любой точке M этого объекта могут быть рассчитаны в соответствии с теоремой сложения скорости и ускорения (рис. 84). Следовательно, для скорости v в точке М Конкретное движение, похожее на фигуру, представляет собой поступательное движение тела вдоль точки O этого тела. Следовательно, поступательная поступательная скорость одинакова во всех точках тела и равна скорости b0 в точке O.
Поскольку относительное движение представляет собой вращение вокруг точки O, скорость относительного движения можно рассчитать с использованием векторного уравнения Эйлера. Рисунок 84 Где r — радиус-вектор точки М, взятый из точки 0. Скорость вращения тела вокруг точки O, или ось мгновенного движения, проходящая через точку O Наконец, получим следующее уравнение для скорости точки М: v = vo + mxr. (21) Уравнение (21) может быть получено путем прямой дифференциации векторного уравнения. p = p0 + r Справедливо в любой момент. Возьмем суммарную производную по времени по обеим сторонам уравнения, учитывая изменение вектора относительно фиксированной системы координат Oixiylzl. У нас есть дп / д т-дп0 / др + др / др Здесь dp / dr = v и dp0 / dr = «0» — скорости точек объектов M и O.
Модуль вектора r как отрезка, соединяющего две точки объекта, равен Поэтому в соответствии с формулой производной по времени от модуля постоянного вектора: dr / dr = «> xr. Объедините результаты, чтобы получить уравнение (21). Как и в случае жесткого плоского движения, часть скорости hx можно интерпретировать как скорость от вращения объекта вокруг точки O Ускорение a в точке M (рис. 85) в конкретном случае, когда переносное движение представляет собой поступательное движение, составляет a = ae + ag.
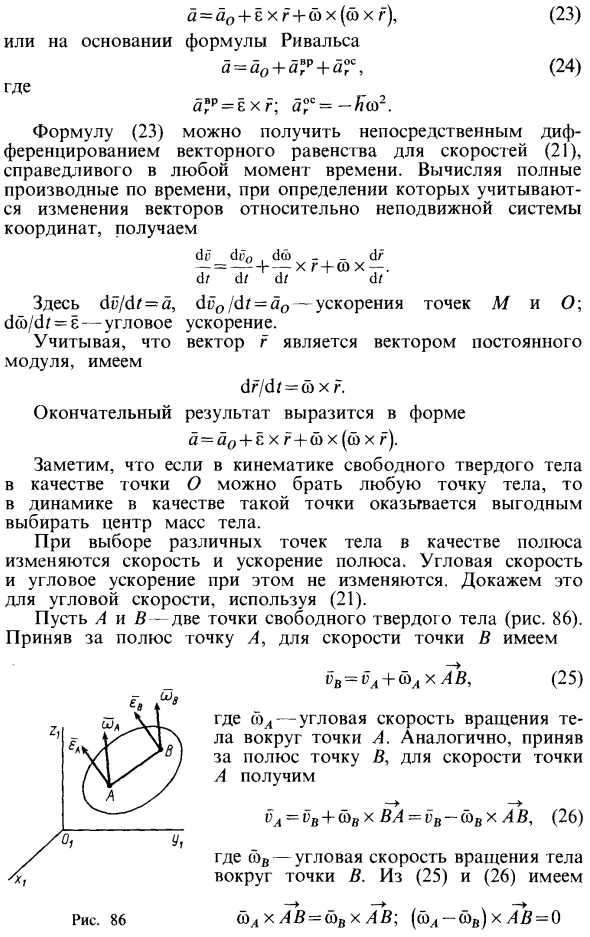
Ускорение удельного движения всех точек тела равно ускорению a0 в точке O, потому что движение вдоль точки O считается поступательным движением. Как и в случае вращения тела вокруг неподвижной точки, ускорение относительного движения состоит из вращательного компонента и непрерывного компонента. ar = Exh + a> x «5r = exp + a> x (wxr), (22) Где е — угловое ускорение тела. Окончательное уравнение для ускорения точки M свободного тела в случае общего движения a = a0 + exr + ^ / dz = d <oB / dr; yol = yo = yo Другими словами, вектор свободного углового ускорения не зависит от выбора полюсов.
Смотрите также:
Задачи по теоретической механике
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
