
Оглавление:

План скоростей
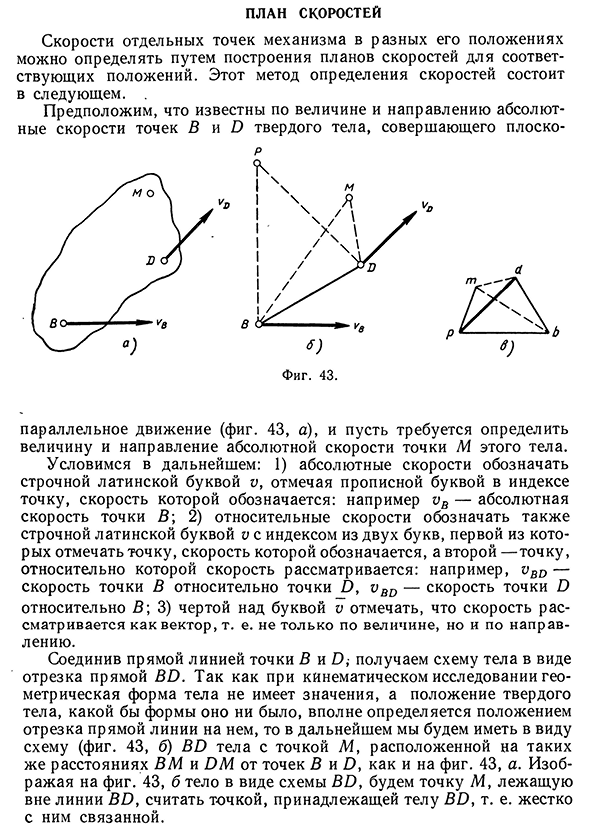
- ПЛАН СКОРОСТЕЙ Скорости отдельных точек механизма в разных его положениях можно определять путем построения планов скоростей для соответствующих положений. Этот метод определения скоростей состоит в следующем. Предположим, что известны по величине и направлению абсолютные скорости точек В и D твердого тела, совершающего плоско Фиг. 43. параллельное движение (фиг. 43, а), и пусть требуется определить величину и направление абсолютной
скорости точки М этого тела. Условимся в дальнейшем: 1) абсолютные скорости обозначать строчной латинской буквой v, отмечая прописной буквой в индексе точку, скорость которой обозначается: например vB — абсолютная скорость точки В; 2) относительные скорости обозначать также строчной латинской буквой v с индексом из двух букв, первой из которых отмечать точку, скорость которой обозначается, а второй —точку, относительно
которой скорость рассматривается: например, vB D — скорость точки В относительно Людмила Фирмаль
точки О, vBD — скорость точки D относительно В; 3) чертой над буквой v отмечать, что скорость рассматривается как вектор, т. е. не только по величине, но и по направлению. Соединив прямой линией точки В и D; получаем схему тела в виде отрезка прямой BD. Так как при кинематическом исследовании геометрическая форма тела не имеет значения, а положение твердого тела, какой бы формы оно ни было, вполне определяется положением отрезка прямой линии на
нем, то в дальнейшем мы будем иметь в виду схему (фиг. 43, б) BD тела с точкой А4, расположенной на таких же расстояниях ВМ и DM от точек В и О, как и на фиг. 43, а. Изображая на фиг. 43, б тело в виде схемы ВО, будем точку М, лежащую вне линии ВО, считать точкой, принадлежащей телу ВО, т. е. жестко с ним связанной.30 Кинематический анализ плоских механизмов Отложим в выбранном масштабе от произвольной точки р (фиг. 43, в) векторы pb и pd абсолютных скоростей vB и vD. Соединив точки b и d прямой линией, получим план скоростей тела BD в виде треугольника pbd.
- На концах векторов pb и pd стрелки, указывающие направления абсолютных скоростей, являются лишними, так как направления векторов абсолютных скоростей, выходящих из точки р, понятны и без стрелок. Точка р называется полюсом плана скоростей. Вектор db (в направлении otJ k &) является вектором vBD; вектор bd (в направлении от b к d) является вектором vDB. Так как точка В относительно D (т. е. при условно неподвижной точке D) и точка D относительно В могут двигаться только по окружностям с радиусами BD, то скорости vBD и vDB могут быть направлены только перпендикулярно к BD. Поэтому сторона bd треугольника pbd
перпендикулярна к BD. На схеме тела прописными буквами В и D отмечены положения точек, абсолютные скорости которых заданы; на плане скоростей соответствующими строчными буквами b и d отмечены концы векторов абсолютных и относительных скоростей этих точек. Полюс р плана является начальной точкой векторов абсолютных скоростей всех точек тела BD. Точка тела BD, абсолютная скорость которой равна нулю, является мгновенным центром вращения тела BD. На плане скоростей точка,
изображающая абсолютную скорость мгновенного центра вращения, совпадает с Людмила Фирмаль
полюсом р. Скорости vB и vD направлены перпендикулярно к радиусам вращения точек В и D вокруг мгновенного центра, поэтому мгновенный центр Р вращения получается в точке пересечения перпендикуляров к векторам скоростей vB и vD, проведенных из точек В и D. Треугольник PBD получается подобным треугольнику pbd и сходственно с ним расположен. Подобие треугольников вытекает из взаимной перпендикулярности сторон (например, сторона PD перпендикулярна к стороне pd). Сходственность расположения состоит в том, что при обходе вершин углов обоих треугольников в одном и том же направлении вершины, обозначенные одинаковыми буквами, обходятся в одинаковой последовательности (например, при обходе почасовой стрелке последовательно обходятся вершины PDBP
и pdbp). Перейдем теперь к определению скорости vM. Для определения этой скорости необходимо найти на плане скоростей точку m — конец вектора абсолютной скорости точки М. Точка М движется вместе с точкой В и, следовательно, со скоростью vB этой точки и, кроме того, движется относительно этой точки со скоростью vMB. Поэтому абсолютная скорость vM является геометрической суммой скоростей vB и vMB, что выражается следующим векторным уравнением: _ V M ~ V B + V MB-План скоростей 31 Правая часть этого уравнения говорит о том, что для получения вектора скорости им , являющейся геометрической суммой vB и vMB, надо провести вектор скорости vBi к концу этого вектора пристроить вектор скорости vMB и затем начало первого вектора соединить с концом второго. _ Вектор
скорости vB нами уже проведен — это вектор pb плана скоростей. Остается лишь к концу этого вектора, т. е. к точке Ь, пристроить вектор скорости vMB. Относительно точки В точка М может только вращаться; следовательно, вектор скорости vMB от точки b должен быть направлен перпендикулярно к линии ВМ. Для получения точки ш на плане надо определить длину вектора bm, а для этого надо знать величину скорости vMB, которая пока неизвестна. Поэтому от точки b мы проводим не вектор bm, а лишь линию действия этого вектора. Как видим, одного уравнения недостаточно, чтобы определить скорость точки М. Для определения им мы можем написать также
второе векторное уравнение: . = VD + vMD. Приняв во внимание, что вектор скорости vD — вектор pb — нами уже проведен и что скорость vMD может быть направлена только перпендикулярно к MD, проводим из точки d линию действия vMD перпендикулярно к MD. Точка т, в которой сходятся концы векторов абсолютной и относительных скоростей точки М, должна лежать на обеих линиях действия и потому находится в точке их пересечения. Соединив точку m с полюсом р, получаем вектор pm абсолютной скорости vM. Для нахождения точки m на плане скоростей мы соединили на схеме точку М с точками В и D, получив треугольник BMD, и на векторе bd относительных скоростей построили треугольник bmd, подобный
треугольнику BMD и сходственно с ним расположенный. Подобным же образом надлежит поступать при определении абсолютной и относительных скоростей любой точки тела BD. Треугольник bmd на плане скоростей получается в том случае, когда точка М на схеме лежит вне линии BD. Если точка М находится на отрезке BD или его продолжении, то на плане скоростей точки m расположится на отрезке bd или его продолжении. И в этом случае отрезки bm и dm будут пропорциональны отрезкам BM и DM. Если бы была задана скорость vM и требовалось найти на схеме такую принадлежащую телу точку Л4, которая в изображенном на фиг. 43 положении тела
движется с такой скоростью, то для этого надо было бы провести на плане вектор pm, построить треуголь-32 Кинематический анализ плоских механизмов ник bmd, а затем построить на схеме треугольник BMD, подобный треугольнику bmd и сходственно с ним расположенный. Масштаб плана скоростей выявляется при проведении первого вектора: где — масштаб плана скоростей в м/сек-мм; vB — величина абсолютной скорости точки В в м/сек; pb — длина вектора абсолютной скорости точки В в мм. Для определения величины скорости какой-либо точки по плану скоростей длину вектора этой скорости надлежит умножить на масштаб плана.
Угловая скорость со вращения тела BD может быть получена путем деления абсолютной скорости какой-либо точки тела на ее расстояние до мгновенного центра вращения; например где vB — в м/сек и РВ — в м. Если точка Р находится вне чертежа, то на основании подобия треугольников PBD и pbd вместо РВ можно подставить k-pb, где k — отношение длин сходственных сторон, равное k = Поступив таким образом, получаем (выражая pb в мм и умножая vB на 103 мм/м) (О = 103 -uB : k-pb = Выше при построении плана скоростей мы располагали четырьмя данными: величинами и направлениями обеих скоростей vB и vD. План скоростей может быть построен и по
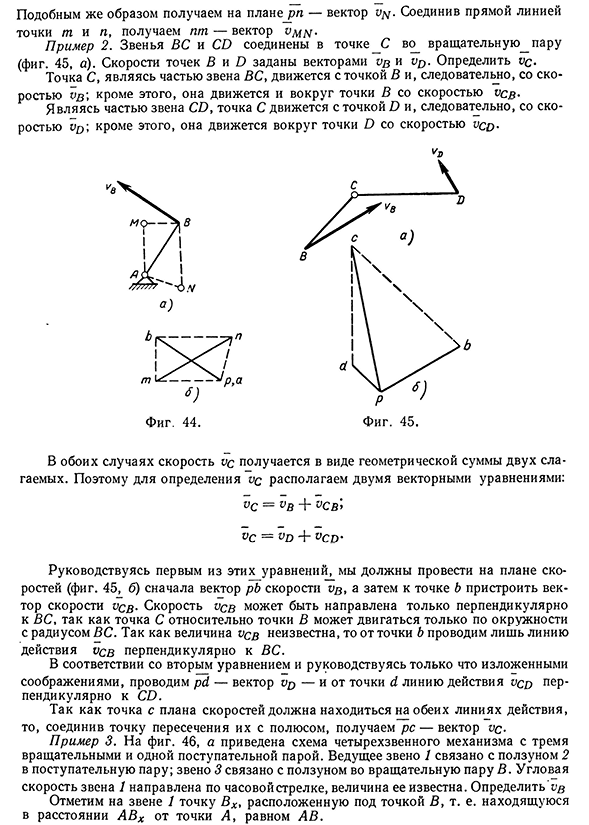
трем любым из этих данных. Например, если бы скорость vD была известна только по направлению, то из полюса р вместо вектора pd мы смогли бы провести лишь линию действия этого вектора; положение точки d определилось бы в этом случае в результате проведения линии действия vDB — второго геометрического слагаемого векторного уравнения vD = vB + + VDBПример 1. Для механизма I класса 1-го порядка в изображенном нафиг. 44, а положении построить план скоростей и, пользуясь планом, определить считая точки М и N принадлежащими звену АВ. Скорость точки В задана вектором vB . Из полюса р проводим pb — вектор vB (фиг. 44, б). Так как точка А неподвижна, то точка а — конец вектора ра скорости од совпадает с полюсом р. Линия pb является планом
скоростей. Для определения им строим на линии pb треугольник ptnb, подобный треугольнику АМВ и сходственно с этим треугольником расположенный; pm — векторПлан скоростей Подобным же образом получаем на плане рп — вектор v^. Соединив прямой линией точки т и п , получаем run — вектор vmN . Пример 2. Звенья ВС и CD соединены в точкеС во вращательную_пару (фиг. 45, а). Скорости точек В и D заданы векторами св и vp. Определить VQ. Точка С, являясь частью звена ВС, движется сточкой В и, следовательно, со скоростью vB \ кроме этого, она движется и вокруг точки В со скоростью vqb-Являясь частью звена CD, точка С движется с точкой D и,
следовательно, со скоростью Up; кроме этого, она движется вокруг точки D со скоростью урр. В обоих случаях скорость vq получается в виде геометрической суммы двух слагаемых. Поэтому для определения vq располагаем двумя векторными уравнениями: VC — VB VCB’ VC = vd + VCDРуководствуясь первым из этих уравнений, мы должны провести на плане скоростей (фиг. 45± б) сначала вектор pb скорости ив, а затем к точке b пристроить вектор скорости VQBСкорость vqb может быть направлена только перпендикулярно к ВС, так как точка С относительно точки В может двигаться только по окружности с радиусом ВС. Так как величина vcb неизвестна, то от точки b проводим лишь линию действия vcb перпендикулярно к ВС. В соответствии со вторым уравнением и
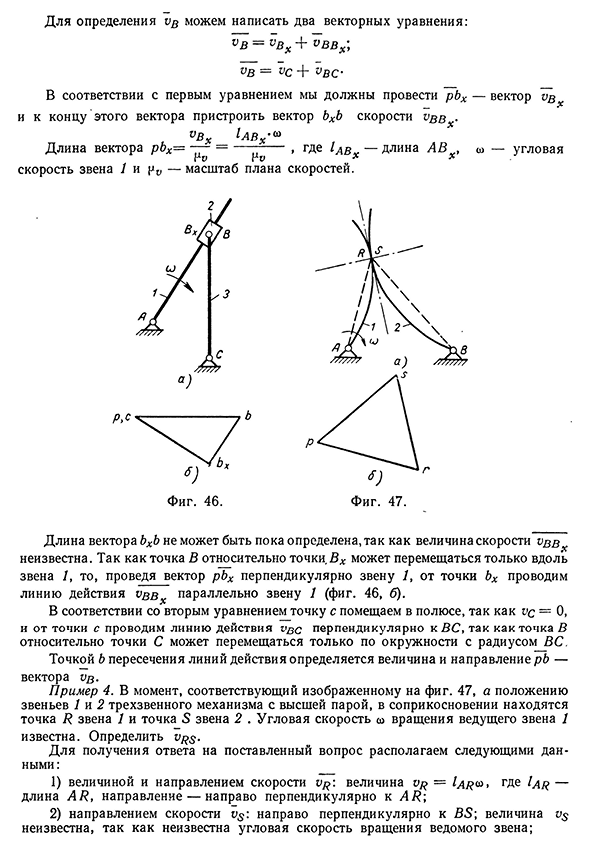
руководствуясь только что изложенными соображениями, проводим pd — вектор vD — и от точки d линию действия vcp перпендикулярно к CD. Так как точка с плана скоростей должна находиться на обеих линиях действия, то, соединив точку пересечения их с полюсом, получаем рс — вектор vp. Пример 3. На фиг. 46, а приведена схема четырехзвенного механизма с тремя вращательными и одной поступательной парой. Ведущее звено 1 связано с ползуном 2 в поступательную пару; звено 3 связано с ползуном во вращательную пару В. Угловая скорость звена 1 направлена по часовой стрелке,
величина ее известна. Определить ^ Отметим на звене 1 точку Вх , расположенную под точкой В, т. е. находящуюся в расстоянии АВХ от точки А, равном АВ. 3 Зиновьев 61234 Кинематический анализ плоских механизмов Для определения vB можем написать два векторных уравнения: V B = vbx + v bbx \ V B = VC + VB C . В соответствии с первым уравнением мы должны провести pbx — вектор Б# и к концу этого вектора пристроить вектор bx b скорости °в х 1авх -<» Длина вектора pbx = — = — ——-, где / д я — длина ЛВ , <» — угловая ru rv * * скорость звена 1 и — масштаб плана скоростей. Длина вектора bx b не может быть пока определена, так как величина скорости неизвестна. Так как точка В относительно точки В х может перемещаться только вдоль
звена /, то, проведя вектор pbx перпендикулярно звену /, от точки Ьх проводим линию действия vbbx параллельно звену 1 (фиг. 46, б). В соответствии со вторым уравнением точку с помещаем в полюсе, так как vc = О, и от точки с проводим линию действия vbc перпендикулярно к В С, так как точка В относительно точки С может перемещаться только по окружности с радиусом В С . Точкой b пересечения линий действия определяется величина и направление pb — вектора vb. Пример 4. В момент, соответствующий изображенному на фиг. 47, а положению звеньев 1 и 2 трехзвенного
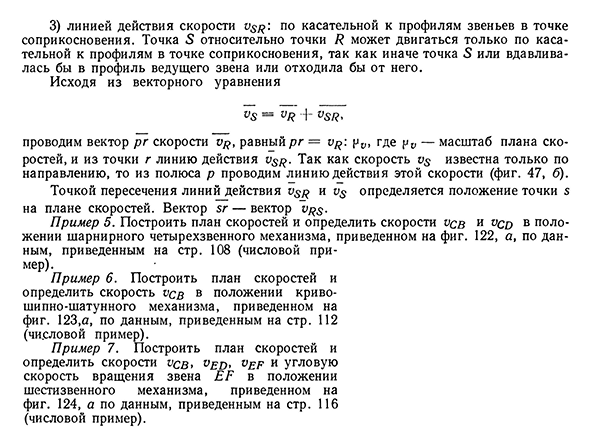
механизма с высшей парой, в соприкосновении находятся точка R звена 1 и точка S звена 2 . Угловая скорость и вращения ведущего звена 1 известна. Определить vp$. Для получения ответа на поставленный вопрос располагаем следующими данными : 1) величиной и направлением скорости vpi величина ср = гДе 1 д р — длина A R , направление — направо перпендикулярно к A R ; 2) направлением скорости vs : направо перпендикулярно к BS-, величина v$ неизвестна, так как неизвестна угловая скорость вращения ведомого звена;План ускорений 35 3) линией действия скорости по касательной к профилям звеньев в точке соприкосновения. Точка S относительно точки R может двигаться
только по касательной к профилям в точке соприкосновения, так как иначе точка S или вдавливалась бы в профиль ведущего звена или отходила бы от него. Исходя из векторного уравнения = vR + VS R , проводим вектор рг скорости равный pr = v#: pD, где pv — масштаб плана скоростей, и из точки г линию действия Так как скорость известна только по направлению, то из полюса р проводим линию действия этой скорости (фиг. 47, б). Точкой пересечения линий действия и определяется положение точки s на плане скоростей. Вектор sr — вектор v%$. Пример 5. Построить план скоростей и определить скорости vqb и в положении шарнирного четырехзвенного механизма, приведенном на фиг. 122, а, по данным, приведенным на стр. 108 (числовой пример). Пример 6. Построить план скоростей и определить скорость vqb в положении кривошипно-шатунного механизма, приведенном на фиг. 123,а, по данным, приведенным на стр. 112 (числовой пример). Пример 7. Построить план скоростей и определить скорости vqb, vE d , vE p и угловую скорость вращения звена E F в положении шестизвенного механизма, приведенном на фиг. 124, а по данным, приведенным на стр. 116 (числовой пример)
определить скорости vqb и в положении шарнирного четырехзвенного механизма, приведенном на фиг. 122, а, по данным, приведенным на стр. 108 (числовой пример). Пример 6. Построить план скоростей и определить скорость vqb в положении кривошипно-шатунного механизма, приведенном на фиг. 123,а, по данным, приведенным на стр. 112 (числовой пример). Пример 7. Построить план скоростей и определить скорости vqb, vE d , vE p и угловую скорость вращения звена E F в положении шестизвенного механизма, приведенном на фиг. 124, а по данным, приведенным на стр. 116 (числовой пример)
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| Кинематический анализ плоских механизмов предварительные сведения | План ускорений |
| Определение положений механизма | Кинематические диаграммы |
