
Оглавление:

Кинематические диаграммы
- В результате кинематического исследования выявляются скорости и ускорения отдельных точек в разных положениях механизма. Наглядное представление о кинематике механизма дают кинематические диаграммы в виде кривых путей, скоростей и ускорений. Кроме этих кривых, в некоторых случаях бывает необходимо строить еще траектории отдельных точек. .Ознакомимся со способами построения кинематических диаграмм на примере весьма распространенного в технике четырехзвенного кривошипно-
шатунного механизма. Как уже упоминалось, кривошипно-шатунный механизм лежит в основе разнообразных поршневых двигателей, поршневых насосов и компрессоров и многочисленных других механических устройств. В поршневых двигателях движущим звеном механизма является всегда ползун, в поршневых насосах и компрессорах — кривошип, но в большинстве устройств, где применяется кривошипно-шатунный механизм, кривошип независимо от того, является ли он Поэтому при
движущим или нет, вращается с угловой скоростью, весьма близкой к равномерной. Людмила Фирмаль
кинематическом исследовании кривошипношатунного механизма в качестве ведущего звена (т. е. звена с заданным законом движения) удобно выбирать кривошип и в том случае, когда он не является движущим звеном. При равномерной угловой скорости углы поворота кривошипа от некоторого его начального положения прямо пропорциональны промежуткам времени, в течение которых повороты совершаются, а поэтому кривые, выражающие зависимости путей, скоростей и ускорений каких-либо точек механизма от угла поворота кривошипа, являются также и кривыми, выражающими
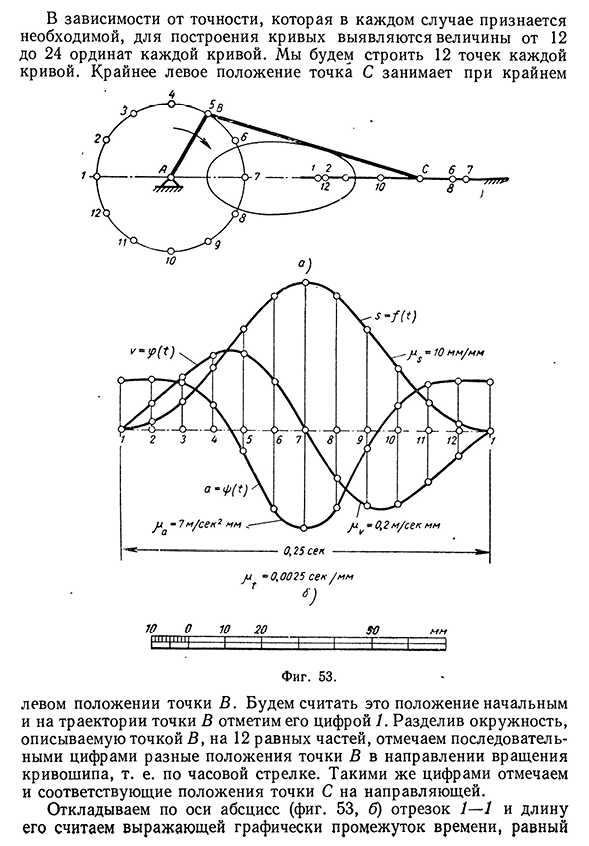
зависимости тех же величин от времени. На фиг. 53, а в масштабе изображена схема кривошипно-шатунного механизма с кривошипом АВ длиной 200 мм и шатуном ВС длиной 600 мм. Кривошип вращается с равномерной .угловой скоростью, делая 240 оборотов в минуту. Будем строить диаграммы путей, скоростей и ускорений точки С, представляющей в кривошипно-шатунных механизмах обычно наибольший интерес.42 Кинематический анализ плоских механизмов В зависимости от точности, которая в каждом случае признается необходимой, для построения кривых выявляются величины от 12 до 24 ординат каждой кривой. Мы будем строить 12 точек каждой кривой. Крайнее левое положение точка С занимает при крайнем w о 10 20 50 мм Еа.Ш11 I □ I I ‘ I I Фиг. 53. левом
- положении точки В. Будем считать это положение начальным и на траектории точки В отметим его цифрой 1. Разделив окружность, описываемую точкой В, на 12 равных частей, отмечаем последовательными цифрами разные положения точки В в направлении вращения кривошипа, т. е. по часовой стрелке. Такими же цифрами отмечаем и соответствующие положения точки С на направляющей. Откладываем по оси абсцисс (фиг. 53, б) отрезок 1—1 и длину его считаем выражающей графически промежуток времени, равныйКинематические диаграммы 43 0,25 сек., в течение которого (при 240 оборотах в минуту) совершается один оборот кривошипа. Делим этот отрезок на 12 равных частей, т. е. такое же число равных частей, на какое разделена траектория точки В на фиг. 53, а. Строим
сначала кривую s = f (f), где s — расстояние точки С, отсчитываемое вправо от ее начального (крайнего левого) положения, a t — промежуток времени, отсчитываемый от начального момента. Так как положения точки С на ее траектории при разных положениях точки В определяются неизменным расстоянием ВС между этими точками, то нахождение ординат кривой s = f (/) не представляет каких-либо затруднений. Проведя на фиг. 53, б ординаты и соединив их плавной кривой, получаем кривую s = / (/). Для построения кривой v = (/), где v — скорость точки С, a t имеет такое же значение, как и на предыдущей кривой, необходимо определить скорости точки С при 12 разных положениях точки В, а для этого, вообще говоря, надо построить столько же планов скоростей. В данном случае при симметричности механизма и поэтому
при симметричном расположении кривой s — f (t) относительно средней ординаты Людмила Фирмаль
проведенной из точки 7, скорости точки С в симметричных относительно этой ординаты положениях будут равны по величине и противоположны по знаку. Приняв это во внимание, можно ограничиться построением планов скоростей только для первых семи положений точки В, Две симметричные ветви кривой v = (/) построены на фиг. 53, б. Планы скоростей, которые были построены для определения скорости точки С при этих положениях точки В не приведены. При построении кривой v = <?(/) направление скорости точки С вправо считалось положительным. Для построения кривой а
= ф (/), где а — ускорение точки С, a t — время, надо также строить столько же планов ускорений, сколько намечено разных положений для точки В, но в данном случае при симметричности двух ветвей кривой скоростей относительно средней ординаты можно ограничиться построением планов только для первых семи положений. Кривая а = ф (/) приведена нафиг. 53, б вместе с двумя предыдущими кривыми. Планы ускорений, построенные для определения ординат кривой а == ф (/), не приведены. При построении кривой направление ускорения вправо считалось положительным. Кривые скоростей и ускорений могут быть построены и без помощи планов. Так как кривая скоростей является первой производной от
кривой путей, то она может быть построена по точкам путем графического дифференцирования кривой пути; таким же образом может быть построена и кривая ускорений, являющаяся первой производной кривой скоростей. На фиг. 53, б взяты следующие масштабы. Масштаб абсцисс для всех кривых p i/= 0,0025 сек!мм (длина 100 мм на фиг. 53, б выражает промежуток времени 0,25 сек., в течение которого кривошип делает один оборот).44 Кинематический анализ плоских механизмов Ординаты кривой s = f (t) сняты непосредственно с фиг. 53, а, следовательно, масштаб ординат этой кривой = 10 мм!мм. Ординаты кривой v = <р (/) отложены в масштабе = = 0,2 м/сек-мм, ординаты кривой а = ф ( / ) — в масштабе = = 7 м/сек?-мм. Выше упомянуто, что, кроме диаграмм путей, скоростей и ускорений, при кинематическом анализе некоторых механизмов
приходится строить по точкам траектории точек, принадлежащих отдельным звеньям. В качестве примера можно привести изображенный на фиг. 33 механизм тестомесильной машины, при кинематическом анализе которого построение траектории конечной точки жестко связанного с шатуном рабочего органа является необходимым, так как видом этой траектории определяется производительность машины. При кинематическом анализе кривошипно-шатунного механизма необходимость в выявлении траекторий отдельных точек может возникнуть только для точек, связанных с шатуном, так как траектории точек, связанных с двумя остальными подвижными звеньями, являются в одном случае окружностями, а в другом — прямыми линиями. На фиг. 53, а приведена для примера эллипсовидная траектория (но не эллипс) точки шатуна, находящейся на линии ВС на равных расстояниях от точек В и С
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| План скоростей | Аналитическое определение скоростей и ускорений |
| План ускорений | Плоские механизмы для передачи вращательного движения общие сведения |
