
Оглавление:

Аналитическое определение скоростей и ускорений
- Изложенные графические методы определения скоростей и ускорений просты, наглядны и быстро приводят к цели. Однако как бы тщательно* ни выполнялись построения планов, всегда приходится считаться с недостатком, свойственным графическим методам: трудно установить, какая точность результатов достигается.
В тех случаях, когда расчет должен быть особенно точным, и когда точность расчета задается заранее, пути, скорости и ускорения могут быть определены аналитически. Аналитическое определение путей, скоростей и ускорений всегда является возможным, так как механизм во всяком положении представляет собой замкнутую фигуру, для определения сторон и углов которой всегда имеется
достаточно данных. Однако уравнения, к которым приводят аналитические Людмила Фирмаль
методы, получаются часто сложными и потому неудобными для практического использования при анализе даже самых простых механизмов. В предыдущем параграфе, применяя графические методы, мы получили три кривые, выражающие пути, скорости и ускорения точки С механизма, изображенного схематически на фиг. 53, а, в функциях угла поворота кривошипа или времени его поворота от
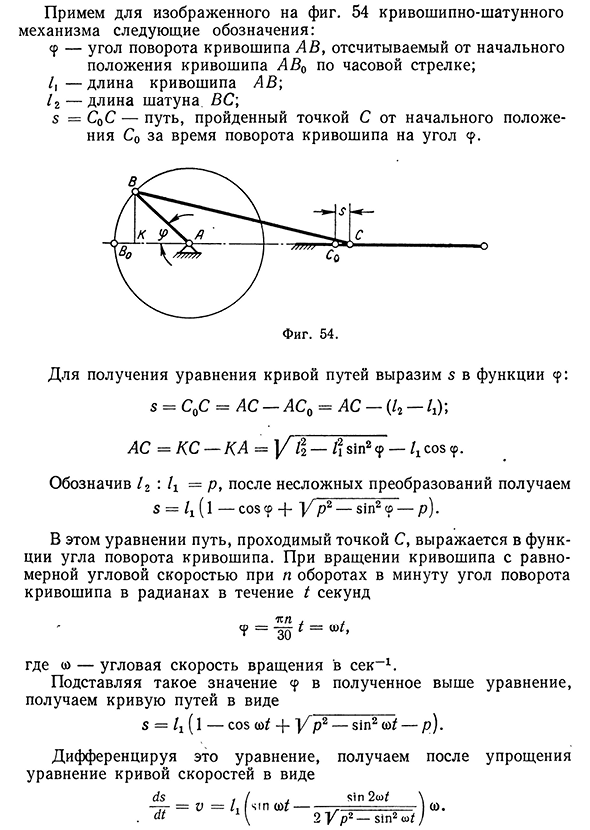
начального положения. При применении аналитических методов мы вместо кривых должны получить уравнения, выражающие те же зависимости, какие выражаются кривыми.Аналитическое определение скоростей и ускорений 45 Примем для изображенного на фиг. 54 кривошипно-шатунного механизма следующие обозначения: ср — угол поворота кривошипа АВ, отсчитываемый от начального положения кривошипа ЛВ0 по часовой стрелке; Z,— длина
- кривошипа АВ\ 12 — длина шатуна ВС\ s = CQC — путь, пройденный точкой С от начального положения Со за время поворота кривошипа на угол ср. Для получения уравнения кривой путей выразим s в функции <р: s — CqC — АС — ЛС0 — АС — (Z2 — Zj); АС = КС — КА = sin2 «p — Zj cos <р. Обозначив Z2 : Zx = р, после несложных преобразований получаем s = Zi (1 — cos ср + «j/p2 — sin2 ср — р ). В этом уравнении путь, проходимый точкой С, выражается в функции угла поворота кривошипа. При вращении кривошипа с равномерной угловой
скоростью при п оборотах в минуту угол поворота кривошипа в радианах в течение t секунд ‘КП , , ? = зо * = < где со — угловая скорость вращения в сек1 . Подставляя такое значение ср в полученное выше уравнение, получаем кривую путей в виде s = Zx (1 — cos coZ + ] /р 2 — sin2 o)Z — p ).
Дифференцируя это уравнение, получаем после Людмила Фирмаль
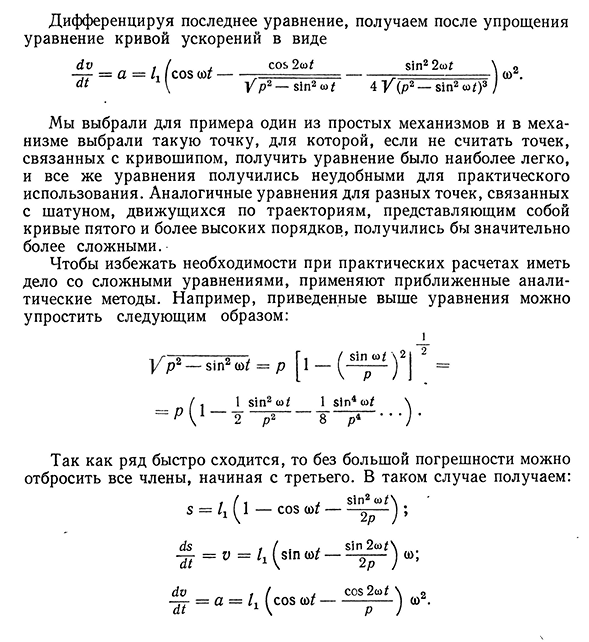
упрощения уравнение кривой скоростей в виде ds ~di sin 2 со/ 2 «Kp2 — sin2 со/ (О.46 Кинематический анализ плоских механизмов Дифференцируя последнее уравнение, получаем после упрощения уравнение кривой ускорений в виде cos 2соt sin2 2<о^ V р2 — sin2
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| План ускорений | Плоские механизмы для передачи вращательного движения общие сведения |
| Кинематические диаграммы | Фрикционная передача |
