
Оглавление:

Принцип возможных перемещений
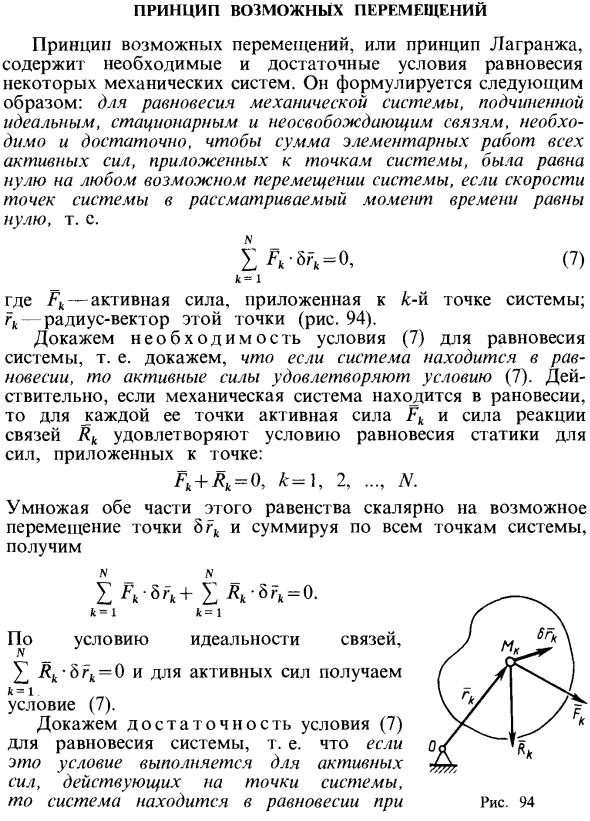
- Включает в себя возможные принципы движения или принципы Лагранжа! Необходимое и достаточное равновесие для некоторых механических систем. Формулируется как: идеальное, стационарное, равновесное сцепленное механическое системное равновесие, если учитывать скорость системной точки, все активные, приложенные к системной точке Необходимо и достаточно, чтобы сумма основной работы силы была равна нулю, момент времени равен нулю, т. £ dZr * = 0, (7) Где Fk — активная сила, приложенная к k-й точке системы. gk — радиус-вектор этой точки (рис. 94). Докажите необходимость условия (7) для уравновешивания системы.
То есть это доказывает, что активная сила удовлетворяет условию (7), когда система находится в равновесии. Фактически, когда механическая система находится в равновесии, для каждой точки активная сила Fk и объединенная сила реакции Rk удовлетворяют условию статического равновесия силы, приложенной к точке. Fk + Rk = 0, k = \, 2, … N Умножение обеих сторон этого уравнения на возможное смещение скалярной точки 8r и суммирование ее во всех точках системы дает: IF, Sf, + vs, ar, = 0. С условием идеальной связи £ Rk 6rk = 0, и мы получаем условие (7) для активной силы. Докажем выполнение условия (7) для равновесия системы.
Любую материальную систему, образованную телами твердыми, жидкими или газообразными, можно рассматривать, как составленную из большого числа материальных точек, подчиненных некоторым связям. Людмила Фирмаль
Другими словами, если это условие выполняется для активной силы, действующей на системную точку, система Рис. 94 Другие условия возможного принципа движения. Теорема о достаточности условия (7) о равновесии системы доказывается методом противоречия. Предполагается, что условие (7) и все остальные условия теоремы выполнены и система не сбалансирована. Если теорема об удовлетворении верна, она должна противоречить условиям теоремы. В результате выполняются все условия теоремы, и баланс системы теряется. В этом случае, по крайней мере, одна точка системы не удовлетворяет условию баланса сил. Fj + D ^ 0. (8) Дайте системе возможные движения.
Поскольку связь является стационарной, базовое фактическое смещение каждой точки системы под действием ненулевой результирующей силы относится к числу возможных смещений, и их комбинации могут быть выбраны в качестве возможных смещений системы , Скорость системной точки в рассматриваемый момент равна нулю в зависимости от условий. Таким образом, основное действительное смещение направлено вдоль точки ускорения, то есть вдоль результирующей силы. Умножение (8) на 8 ^ = 6 ^ на скаляр приводит к следующему: (G »+ L) -8 г *> 0 (9) По крайней мере, одна точка в системе не сбалансирована.
Подведем итог (9) для всех точек системы: EДAr8r> 0. (9 ‘) Для идеального соединения О.-.- Так из (9 ‘) £ Fkbfk> Q, противоречит условию (7). Следовательно, система не будет разбалансирована при соблюдении принципа возможного смещения. Принцип полностью доказан. Без дополнительного требования, чтобы скорость системной точки исчезала в момент возникновения проблемы, принцип возможного смещения настаивает только на том, что ускорение системной точки исчезает. Вместе с тем, что скорость точки равна нулю, это дает равновесие системы в тот момент, когда выполняется условие (7) для эффективной силы.
В долгосрочной перспективе Если это условие выполнено, система будет находиться в равновесии в течение длительного времени соответственно. То есть, если скорость системной точки равна нулю в начале длительности, скорость и ускорение точки равны нулю. Принцип возможного смещения не включает силу реакции связывания. Однако его также можно использовать для определения неизвестной силы реакции связывания. В результате соединения, которые должны определять силу реакции, отбрасываются (система освобождается от этого соединения) и заменяются силой реакции. Эти силы добавляются к активной силе.
Остальное подключение к системе должно быть идеальным. Время от времени неполные соединения заменяются идеальными соединениями, чтобы компенсировать недостатки, вызванные соответствующими силами. Следовательно, если скрепление тела представляет собой шероховатую поверхность, ее можно заменить гладкой, добавив силу трения скольжения к активной силе, а в более общих случаях добавив некоторую силу, чтобы предотвратить скатывание , Твердые уплотнения в форме уплотнения могут быть заменены на неподвижные соединения, плоские поверхности или шарики, соответственно, и добавляют вставные, векторные или алгебраические моменты.
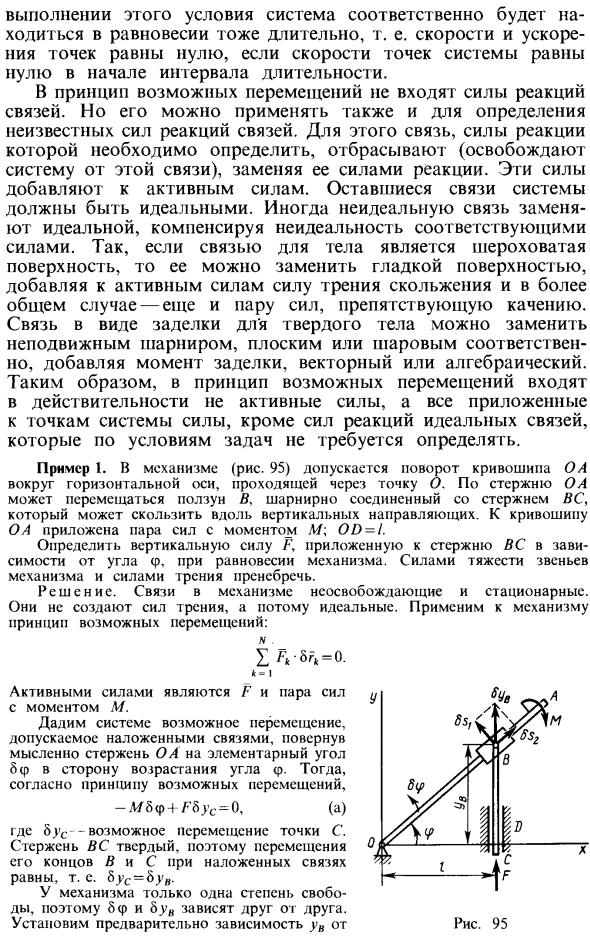
- Следовательно, принцип возможного смещения не включает фактическую эффективную силу, но применяется к точке системы, за исключением идеальной силы реакции сцепления, которую не нужно определять в соответствии с рассматриваемой ситуацией. Вся сила включена. Пример 1. В механизме (рис. 95) кривошип O A может вращаться вокруг горизонтальной оси через точку O. Ползунок B может перемещаться вдоль стержня OA, повернутого к стержню BC, который может скользить по вертикальной направляющей. Некоторая сила момента M приложена к кривошипу O A. OD = l. Угол <р. В зависимости от нормальной силы F, приложенной к штанге самолета. В балансе механизма.
Гравитация и силы трения звеньев механизма игнорируются. Решения. Муфты внутри механизма не ослаблены и зафиксированы. Они идеальны, потому что они не создают трения. Примените возможные принципы движения к механизму. Эффективная сила — это пара сил F и момента М. Придавая системе возможные движения, которые возможны при наложенном соединении, стержень O A мысленно поворачивается с базовым углом 8 <p в направлении увеличения угла <p. Тогда по принципу возможного движения -L / 8 <p + L8us = 0, (а) Где 8us — возможное смещение точки C. Поскольку ядро самолета сплошное, смещения на его концах B и C равны, то есть 8us = 8v.
Независимо от того, будет ли система материальных точек находиться в равновесии или нет, сумма возможных работ реакций связей на любом возможном перемещении, допускаемом связями, равна нулю. Людмила Фирмаль
Поскольку механизм имеет только одну степень свободы, 8 <p и 8v зависят друг от друга. Сначала установите зависимость от ультрафиолета Рис. 95 е. 3, j = / <g <p. Изменяя расчет полной производной по обе стороны уравнения, Рисунок-96 Подставляя полученные значения (8) Когда вынимается 8ph из SyB и кронштейна, Значение 6ph может отличаться от нуля, поэтому битва в скобках равна нулю. Кроме того, процесс изменения уравнения связи используется для непосредственного установления 8-й и 8-й зависимостей (нс). Когда стержень OA вращается под углом 8 °, точка.
B перемещается на 8 °, = ОВ8ф от точки стержня, соответствующей стержню, и далее ползунок B перемещается на 6z2 вдоль стержня, точка B только направляющей и 5uv. Двигайтесь параллельно. Это связано с тем, что направляющая штанги BC не допускает другого направления движения точки B. Вектор возможных смещений для точки B представлен диагональной диагональю, построенной из смещений компонентов. Из диагонального прямоугольника & YB = & Si / cos <f, или OB = l / cos <p. Давайте дадим стержню переменного тока 8 секунд возможного смещения, допустимого оставшейся муфтой в направлении оси Ax. Точка B может двигаться только на 8 секунд вертикально относительно BD.
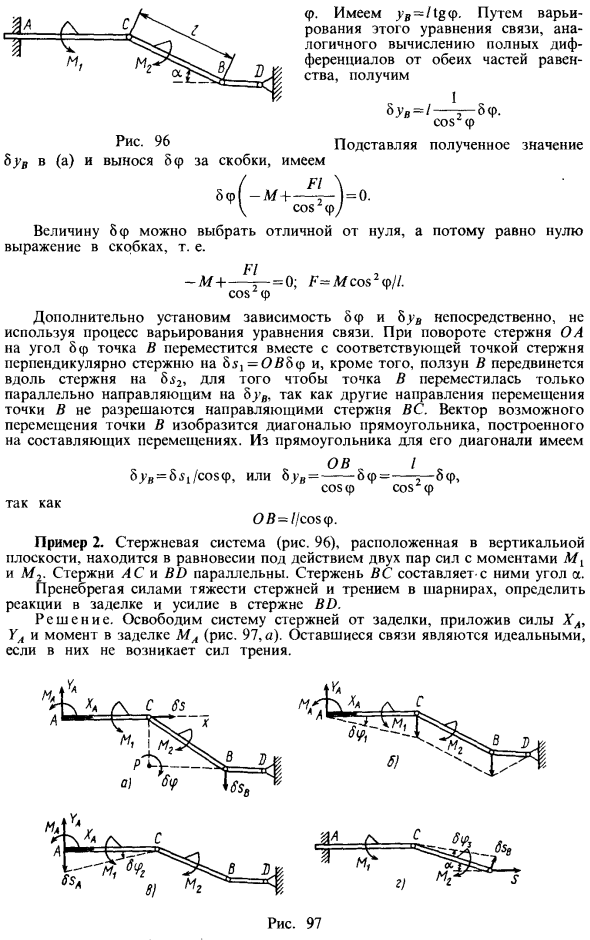
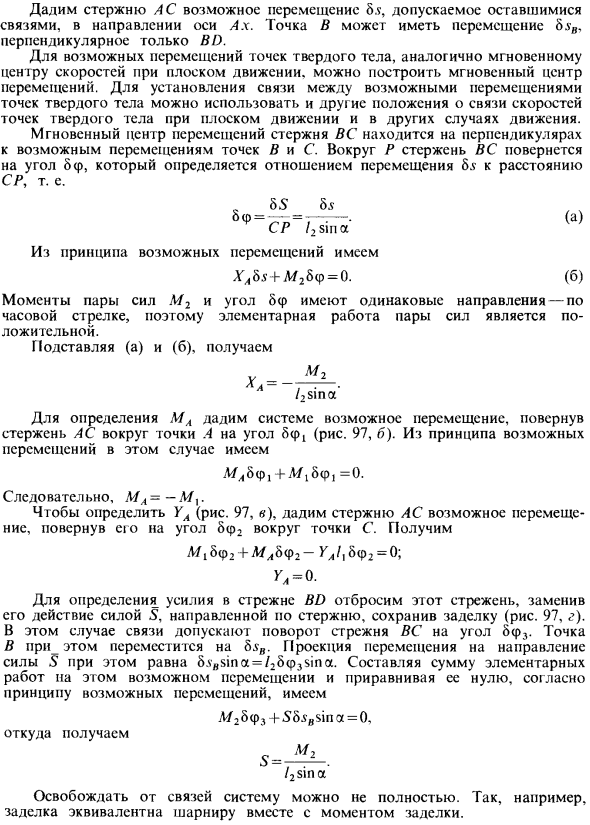
Подобно мгновенному центру скорости при плоском движении, центр мгновенного смещения может быть построен для возможных смещений жестких точек. Чтобы установить взаимосвязь между возможными смещениями сплошной точки, можно использовать другие положения, касающиеся связи скорости сплошной точки в случае плоского движения и других движений. Центр мгновенного движения стержня ВС перпендикулярен возможному движению точек B и C. Вокруг P стержень BC вращается под углом 8 <p. Это определяется соотношением 8 секунд движения и расстояния СР. (А) Из принципа возможного смещения, Х ^ 8с + М28 <р = 0. (В).
Основная работа пары сил положительна, потому что пара сил Mg и момент угла 8 <p находятся в одном направлении (по часовой стрелке). Подставляя (а) и (6) Chl = Чтобы определить ML, поверните стержень переменного тока вокруг точки A на угол 8 <p, чтобы дать системе возможное движение (Рис. 97, b). Из принципа возможного смещения в этом случае Л / ^ бф, + ЛУ28ф2 = 0 В результате Ml = -L /. Чтобы определить U1 (рис. 97, в), стержень переменного тока поворачивают вокруг точки C на угол 8 <p2, чтобы обеспечить возможное движение стержня переменного тока. Λ /, 8 <p2 + Λ / ^ 8φ2-V ^ / | 8 <p2 = 0; Стр = 0.
Для определения силы стержня VO этот стержень отбрасывается, и его действие заменяется силой S, направленной вдоль стержня, удерживающей конец (рис. 97, d). В этом случае стержень стержня может вращаться на угол 8 <p3 посредством соединения. Точка B перемещается в 8sB. Проекция смещения в направлении силы 5 составляет 8sRsina = / 28 <p3sina. В соответствии с принципом возможного перемещения, делая сумму основной работы по этому возможному перемещению равной нулю, A / 28 <pj + S8sesina = 0, Где я могу получить это Система не может быть освобождена от соединения. Например, вложение эквивалентно шарниру с моментом вложения.
Смотрите также:
Задачи по теоретической механике
| Возможные перемещения | Обобщенные координаты системы |
| Элементарная работа силы на возможном перемещении. Идеальные связи | Обобщенные силы |
