
Оглавление:


Обобщенные координаты системы
- Поскольку система состоит из N точек, положение в пространстве в каждый момент определяется 3W координатами системных точек, например, декартовыми координатами. Предположим, что hk, Yk´zk-голономные ограничения наложены на систему. В общем случае в уравнение также входят производные координат точек, но после их интегрирования они становятся геометрическими, Tsk, Yk <2k, /) = 0, s = 1, 2, …. (10) Связь освобождения, представленная неравенством, не рассматривается. Следовательно, память координат связана уравнением /, а независимые координаты имеют вид n = 3N — l. Декартовы координаты могут быть установлены независимо друг от друга.
Остальные координаты определяются из уравнения. Вместо n независимых декартовых координат вы можете выбрать другие независимые параметры qk, q2, -, qn в зависимости от всех или части декартовых координат точек в системе. Эти независимые параметры, определяющие положение системы в пространстве, называются общими координатами системы. В общем случае они могут зависеть от всех декартовых координат системных точек. L, (I) Где k варьируется от 1 до N. Установка обобщенных координат полностью определяет положение системной точки относительно выбранной системы отсчета (например, декартовых осей). Свободная точка имеет три обобщенные координаты.
Таким образом, от сложения двух поступательных движений твердого тела получается поступательное движение со скоростью, равной векторной сумме скоростей составляющих поступательных движений. Людмила Фирмаль
Если точке необходимо перемещаться вдоль определенной поверхности, есть только две обобщенные координаты и так далее. (10) и декартово представление декартовых координат (11) Декартовы координаты могут быть выражены в обобщенных координатах, если выполняется условие разрешимости одновременных уравнений. Это значит * ik = x * («i, … О: Л = Л (? 1, <7r, q„, t); zk = zk (qk, q2, <) • Следовательно, радиус-вектор h˜xk ′ + yJ + zk ^ каждой точки системы = = ^ Qn, т). (12) Для стационарных ограничений время явно не включено в уравнение ограничения. Таким образом, когда система движется, она входит в (12) неявно только через обобщенные координаты.
Для голономных систем вектор возможных смещений точки Srt согласно (12) можно выразить в виде ^ -й8´- + й5ь + — + й8´-? , ´8´´´ <13) Система с n независимыми обобщенными координатами также характеризуется n независимыми возможными переменными. Рисунок 98 Из этой системы, т.е. n = 3N — l. Если связь голономная, с вариациями или вариациями 8 ^ 1, 3-2, …, 6q „. Для голономных систем число независимых возможных смещений равно числу независимых обобщенных координат и В результате число степеней свободы голономной системы равно количеству независимых обобщенных координат.
- Для неголономных систем уравнение ограничения (10) может содержать декартову производную точки и даже уравнение ограничения, где вводится только одна производная. Эти уравнения ограничения накладывают ограничения на вариации 8qt, Sq2, … fiqK, так что обобщенные координаты qt, q2, …, qn сами по себе не связаны с функциональными зависимостями, Уменьшите число. Для неголономных систем в общем случае число независимых вариаций (возможных смещений) меньше количества обобщенных координат. Число степеней свободы неголономной системы, равное числу независимых возможных смещений, также меньше числа обобщенных координат системы.
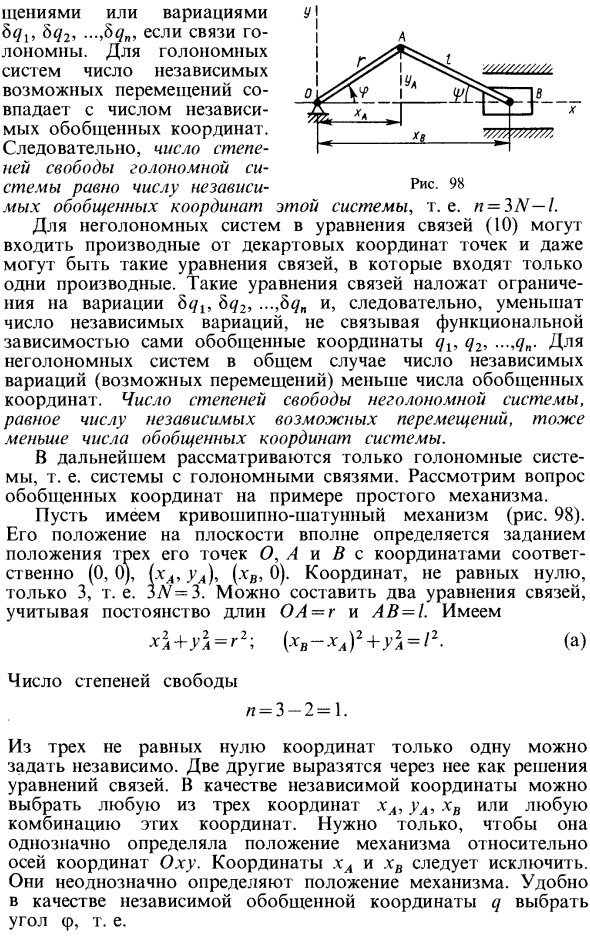
Далее рассматриваются только голономные системы, то есть системы с голономными ограничениями. В качестве примера простого механизма рассмотрим обобщенную координатную задачу. Подготовьте кривошипно-шатунный механизм (Рисунок 98). Его положение на плоскости полностью определяется установкой положения трех точек O, A, B с координатами (0, 0), (xl, yD (xb, 0). Координаты не равны нулю Is 3, то есть 3N = 3. Учитывая постоянство длины OA = r и AB = 1, можно построить два уравнения ограничения. Xa + Va = r2; (xv — xA) 2 + yA = 12- (a) Количество степеней свободы «= 3-2 = 1. Из трех ненулевых координат только одна может быть установлена независимо. Два других выражаются через него как реляционное решение.
Наибольшая скорость, которая может быть получена на выходе из сопла, зависит от площади выходного сечения и должна обеспечиваться необходимым для каждой скорости давлением на входе в сопло. Людмила Фирмаль
Вы можете выбрать любую из трех координат xA, yA, xb или любую комбинацию этих координат в качестве независимых координат. Нужно только однозначно определить положение механизма относительно осей Оху. Координаты XA и XB должны быть исключены. Они однозначно определяют расположение механизма. Удобно выбирать угол <p в качестве независимой обобщенной координаты q. Из уравнений (a) и (b) координаты xl, yl и xv могут быть выражены в виде углов <p.
Для этого решаем эту систему уравнений для координат. Удобно представлять координаты с углом <p, используя диаграмму, не решая одновременных уравнений. 97. Получить x_4 = rcos <p, yA = rsin <p, xB = rcos <p + / cos »| но yx = rsin <p = / sin »| (; Грех »| / = — грех <р; Учитывая это, формула поиска координат принимает вид: x ^ = rcosip; / j4 = rsin <p; xx = rcos <p + 4 // 2 — r2sin2 <p. Нетрудно убедиться, что эти значения в декартовых координатах удовлетворяют одновременным уравнениям (а) и (б).
Смотрите также:
Задачи по теоретической механике
| Элементарная работа силы на возможном перемещении. Идеальные связи | Обобщенные силы |
| Принцип возможных перемещений | Вычисление обобщенных сил |
