
Оглавление:

Приведение масс
- ПРИВЕДЕНИЕ МАСС Так же, как и действующие на механизм силы, к заданной точке заданного звена могут быть приведены и массы всех звеньев. Удобнее .всего и силы и массы приводить к одной и той же точке одного звена, что всегда и делается. П р и в е д е н н о й м а с с о й называется сосредоточенная в одной точке в механизма условная масса, кинетическая энергия которой равна сумме кинетических
энергий масс всех звеньев механизма. Точка, в которой предполагается сосредоточенной приведенная масса, называется т о ч к о й п р и в е д е н и я . Звено, на котором расположена точка приведения, называется з в е н о м п р и в е д е н и я . Из определения приведенной массы вытекает и способ определения ее величины: надо сложить кинетические энергии всех звеньев и полученную сумму разделить на половину квадрата скорости точки
приведения. Если т 19 Т 2, т 3,. . Т к — кинетические энергии звеньев, т п — Людмила Фирмаль
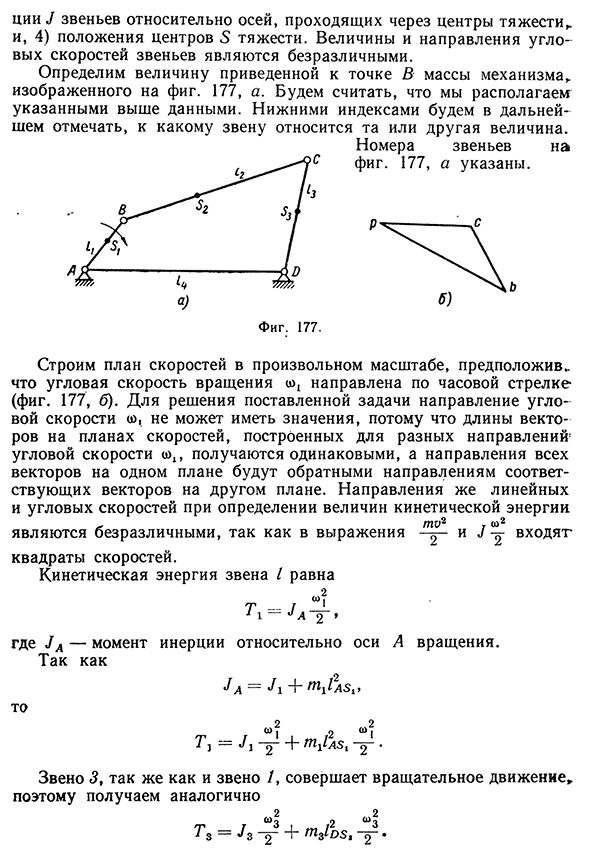
приведенная масса, Н — скорость точки приведения, то т _ , + г2 + т3+ …. + тк Для вычисления величины приведенной массы надо знать: 1) длины / звеньев механизма; 2) массы т звеньев; 3) моменты инер168 Движение и работа машин ции Дж звеньев относительно осей, проходящих через центры тяжести» и, 4) С положения центров тяжести. Величины и направления угловых скоростей звеньев являются безразличными. Определим величину приведенной к точке В массы механизма» изображенного на фиг. 177, окт. Будем считать, что мы располагаем указанными выше данными. В дальнейшем Нижними индексами будем отмечать, к какому звену относится та
или другая величина. Номера звеньев на фиг. 177, окт. Строим план скоростей в произвольном масштабе, предположив., что угловая скорость вращения <о1 направлена по часовой стрелке (фиг. 177, б). Для решения поставленной задачи направление угловой скорости о), не может иметь значения, потому что длины векторов на планах скоростей, скорости угловой построенных для разных направлений’, получаются одинаковыми, а направления всех векторов на одном плане будут обратными направлениям соответствующих векторов на другом плане. Направления же линейных и угловых скоростей при определении величин кинетической энергии являются безразличными, так как в выражения и Дж г входят квадраты
- скоростей. Кинетическая энергия звена / равна ргея-МОМЕНТ ИНЕРЦИИ ОТНОСИТЕЛЬНО ОСИ А ВРАЩЕНИЯ. Как Так д-1 » Ь m J aS^ ТО (О 2И л <о 2| Т3 — ~2~ + м^АСИ-у• Звено 3, так же как и звено /, совершает вращательное движение» поэтому получаем аналогично со? 2 со / Т3 — а ~ 2 ~ + ^ idsi ~ 2 ~ * п риведение масс 169 Сложное движение звена 2 можно рассматривать как поступательное с центром тяжести С2 и вращательное вокруг него. Разлагая движение звена 2 на такие два движения, получаем 4 ш2 Т2-J2 ~ ~ 2~ ~ • Приведенную к точке В получаем массу равной Л + т2 + Тз 0, 5v2b . (Л + m^ Si) 41 + 2 ^ + А 4 ! 4 (л + пгЛз,} 4 0, 5 ^ Подставляя v B = (Р) ° s, = (ps2) » 1 = -77 <1)2 Ьс рс 12 1 з тде-неизвестный масштаб плана скоростей — приводим полу-ченное выше уравнение к виду: _ Цзи + mil2asi / ps2y в J 2 / быть\2 ————-+ ( Дж б) + J в {^б) + ^3 + m ^DS3 ч / 2 В выражение приведенной массы не входят величины угловых скоростей звенье
и масштаб плана скоростей. В качестве множителей последние три члена в правой части содержат отношения длин векторов плана скоростей, но не абсолютные длины этих векторов. Поэтому план скоростей может быть построен в любом масштабе. Величина приведенного момента инерции ./ Л = m » l2. 1. Определить для механизма, изображенного на фиг. 124, а, по данным, приведенным на стр. 116, приведенную к точке в массу от масс звеньев вс, de, EF и ползуна. Определяем кинетические энергии звеньев. Сложное движение звена вс (звено № 2 2) рассматриваем как поступательное «S S 2 и вращательное вокруг него.
В соответствии с этим получаем Два Т2 = m, -^ + J 2-g * Кинетическая энергия ползуна (звено № 3), Людмила Фирмаль
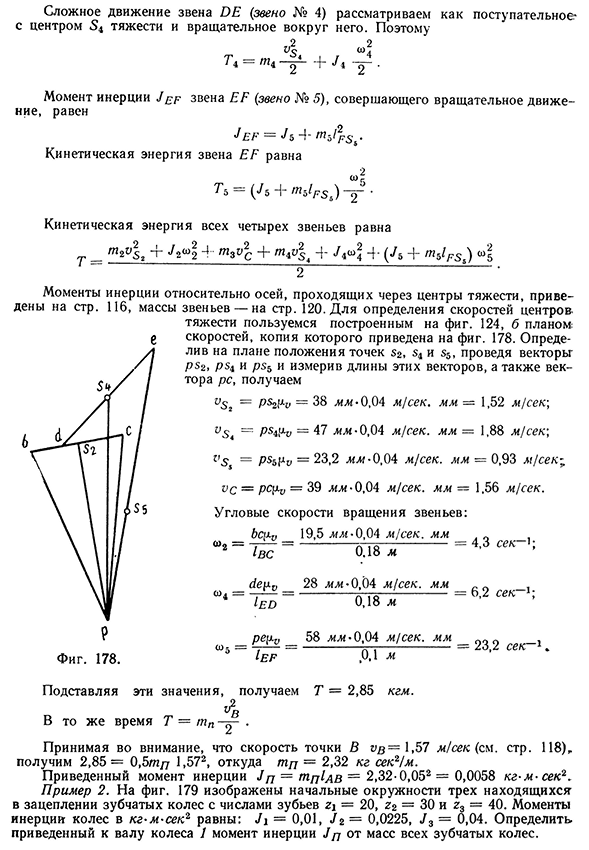
Совершающего поступательное движение, равна 11 612170 Движение и работа машин De de (звено № 4) рассматриваем как поступательное с центром S4 тяжести и вращательное вокруг него. Поэтому т ^ = Т ^ + 7 4 . Момент инерции J EF звена EF (звено № 5), СОВЕРШАЮЩЕГО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ, равен JEF = 75 ЧКинетическая энергия ЕЕ звена равна -5 Л (А + ^ 5 / FSg) • Кинетическая энергия всех четырех звеньев равна M E S 2 + J T < ° L + m3v2c + MIV 2S I + J ^ 2 4 (J5 4-M-ALR S ^ 2 Моменты инерции относительно осей, проходящих через центры тяжести, приве стр. 116, массы звеньев — на стр. 120. Для определения скоростей центров тяжести пользуемся построенным на фиг. 124, б планом скоростей, копия которого приведена на фиг. 178. Определив на плане положения точек С2, С4 и С5 , проведя векторы пс2, ПС4 и пс5 и измерив длины этих векторов, а также вектора рс, получаем yS2 = Пс2^в — 38 жж «0,04 м/сек. мм = 1,52 м / сек \ = ps4p0 = 47 мм ‘ ofil м /
сек. мм = 1,88 м / сек\ на дены Четыре = ps5py = 23,2 жж * 0,04 м / сек. мм = 0,93 м/сек^ ВЦ — ПК\ЛВ = 39 жж-0,04 м/сек. мм-1,56 м / сек. BCP.v _ 19,5 жж-0,04 м / сек. мм=.4 п, 3 ~ ~ ‘ \ 1вс 0.18 м depv = Светодиод 28 мм0,04 м / сек. мм _ ъ 0,18 м = Р^У = МЭФ 58 жж-0,04 м / сек. мм 23 2 ,0.1 м сек—1 Подставляя эти значения, получаем т — 2,85 кем. В то же время т-ТП -^ -. Принимая во внимание, что скорость точки В рв= 1,57 м/сек (см. стр. 118) » получим 2, 8 5 = 0,5 / п / 7 1,572, откуда т ц = 2,32 кг сек2/м. Приведенный момент инерции J и ц = тгДдв ~ 2,32-0,052 = 0,0058 кг м-сек2. 2. На фиг. 179 изображены начальные окружности
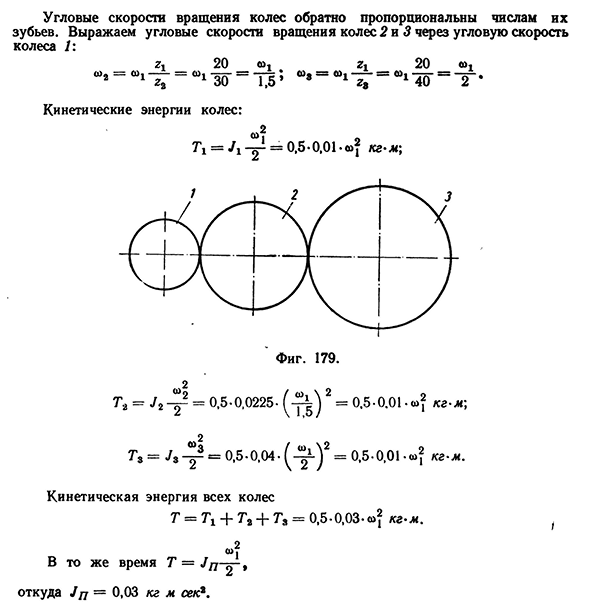
трех находящихся в зацеплении зубчатых колес с числами зубьев zi = 20, Z2 = 30 и Z3 = 40. Моменты инерции колес в кг-м-сек2 равны: л = 0,01, J 2 = 0,0225, J 3 = 0,04. Определить приведенный к валу 1 момент инерции колеса ин от масс всех зубчатых колес.Уравнение движения точки и звена приведения 171 угловые скорости вращения колес обратно пропорциональны числам их зубьев. Выражаем угловые скорости вращения колес 2 и 3 через угловую скорость колеса Г. Кинетические энергии колес: Т3= 73 ^ = 0,5-0,04 ( ^ ) 2 = 0,5 0,01 • «>? кг-м. Кинетическая энергия всех колес т = TJ Т2 7 * з = 0,5*0,03 • кг м, Ш1 В то же время т-откуда = 0,03 кг м сек2.
Смотрите также:
| Уравнение движения машины | Уравнение движения точки и звена приведения |
| Приведение сил | Регулирование хода машин |
