
Оглавление:

Приведение сил
- ПРИВЕДЕНИЕ СИЛ Совместным действием всех приложенных к разным звеньям механизма сил определяется мощность, которая в каждый момент должна подводиться извне к ведущему звену, чтобы движение его совершалось по заданному закону. Если величины, направления и точки приложения действующих на разные звенья сил известны, то задача об определении мощности, которая должна подводиться к ведущему звену, может быть решена, так как необходимые для определения мощностей скорости точек приложения сил могут быть получены из плана скоростей. При решении такой задачи все действующие на механизм силы
заменяются одной силой, приложенной к ведущему звену, мощность которой равна сумме мощностей всех действующих на разные звенья сил. Такая сила называется п р и в е д е н н о й . Величина приведенной силы подсчитывается в соответствии с заданным ее направлением и заданной точкой ее приложения. Точка приложения приведенной силы называется т о ч к о й п р и в е д е н и я . Задача об определении приведенной силы решается просто и изящно при использовании теоремы Н. Е. Жуковского о жестком рычаге. Т е о р е м а Н. Е. Ж у к о в с к о г о .
Сумма моментов всех действующих на звенья механизма сил (включая и силы инерции), перенесенных Людмила Фирмаль
параллельно самим себе в одноименные точки повернутого на 90° плана скоростей, относительно его полюса равна нулю. Доказательство этой теоремы основывается на использовании принципа возможных перемещений, согласно которому сумма элементарных работ всех действующих на систему сил (включая и силы инерции) на возможных для системы перемещениях равна нулю. Для механизма, движения звеньев которого определяются движениями его ведущего звена, математическое выражение этого принципа получает вид P1dsl cos a j + P^iSz cos а2 -j.. . P„dsn cos а„ = 0 или короче п 2 c o s л 1 — о> где Pt — силы; dst — бесконечно малые перемещения точек приложения сил; at — углы между направлениями сил и
направлениями перемещений точек приложения сил.Приведение сил 163 Разделив обе части уравнения на бесконечно малый промежуток времени dt, в течение которого перемещения совершаются, получаем п п п 2 cos = 2 cos = = 0> 1 I 1 — скорости точек приложения сил Pt\ — проекции скоростей тех же точек на линии действия сил Рь\ где vt vL cos ; — мощности сил Pt. На фиг. 173, а и б приведены схема звена ВС с вектором силы Pz, приложенной в точке </, и повернутый на 90° план скоростей звена с вектором силы Pz, перенесенной в параллельно самой себе в точку i плана. Пользуясь повернутым планом скоростей, мощность силы Pt можно выразить
- следующим образом: N i = P iv i cos x i = p i (P0 fS COS ocz = = где — перпендикуляр, опущенный из полюса р на линию действия силы Pz; — масштаб плана скоростей. Угол между pi и hi равен a z, так как pi | Vj и ht | Р Так как полученное выше равенство имеет место для то /• всех сил PL< п п 1 а так как =£ 0, то 2 р д = о, что и является доказательством теоремы. Пользуясь теоремой Жуковского, легко определить силу, которая должна быть приложена к ведущему звену в заданной точке и по заданной линии действия для уравновешивания всех сил, действующих на разные звенья механизма. Такая задача сводится к определению момента, уравновешивающего моменты сил, приложенных 11164 Движение и работа машин к жесткому рычагу, которым в соответствии с
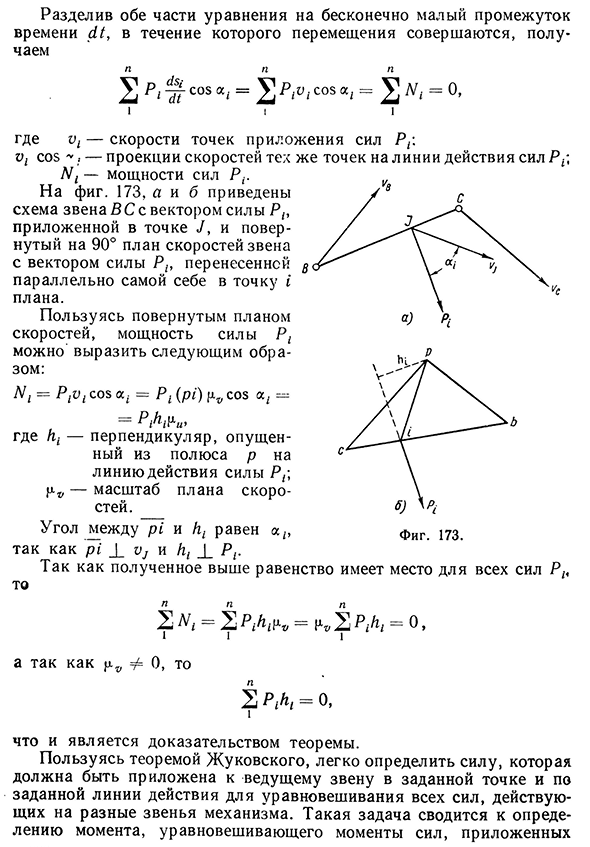
теоремой Жуковского может рассматриваться повернутый план скоростей. Поясним это на примере. Пусть на звенья ВС и CD изображенного на фиг. 174, а механизма действуют силы Р2 и Р3, приложенные в точках Е и F. При определении этих равнодействующих сил силы инерции были учтены. Определить силу Р, которую в изображенном на фиг. 174, а положении механизма следует приложить в точке В перпендикулярно ведущему звену АВ для уравновешивания сил Р2 и Р3. Звено АВ вращается по часовой стрелке с неизвестной угловой скоростью. Масштаб плана механизма неизвестен. Строим план скоростей в произвольном масштабе, который и не представляется возможным определить, так как ни угловая скорость вращения звена АВ, ни его длина не заданы. На плане скоростей (фиг. 174, б) проводим векторы ре и pf скоростей
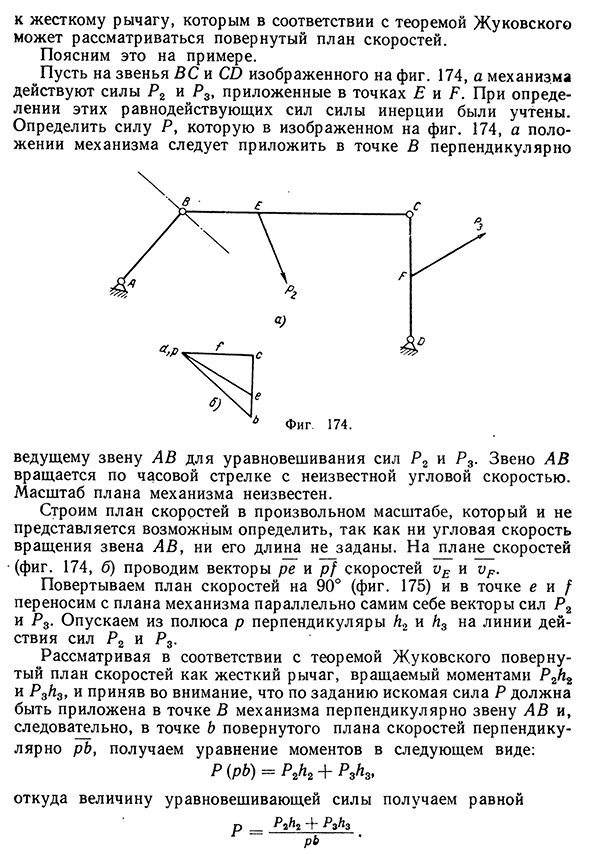
vE и vF. Повертываем план скоростей на 90° (фиг. 175) и в точке е и f Людмила Фирмаль
переносим с плана механизма параллельно самим себе векторы сил Р2 и Р3. Опускаем из полюса р перпендикуляры h2 и h3 на линии действия сил Р2 и Р3. Рассматривая в соответствии с теоремой Жуковского повернутый план скоростей как жесткий рычаг, вращаемый моментами Р2Л2 и P3h3, и приняв во внимание, что по заданию искомая сила Р должна быть приложена в точке В механизма перпендикулярно звену АВ и, следовательно, в точке b повернутого плана скоростей перпендикулярно pb, получаем уравнение моментов в следующем виде: P(pb) = P2h2 + P3h3, откуда величину уравновешивающей силы получаем равной П _ + ЛЛ pbПриведение сил 165 На фиг. 175 уравновешивающая сила Р должна создавать момент, вращающий повернутый план скоростей по часовой стрелке,
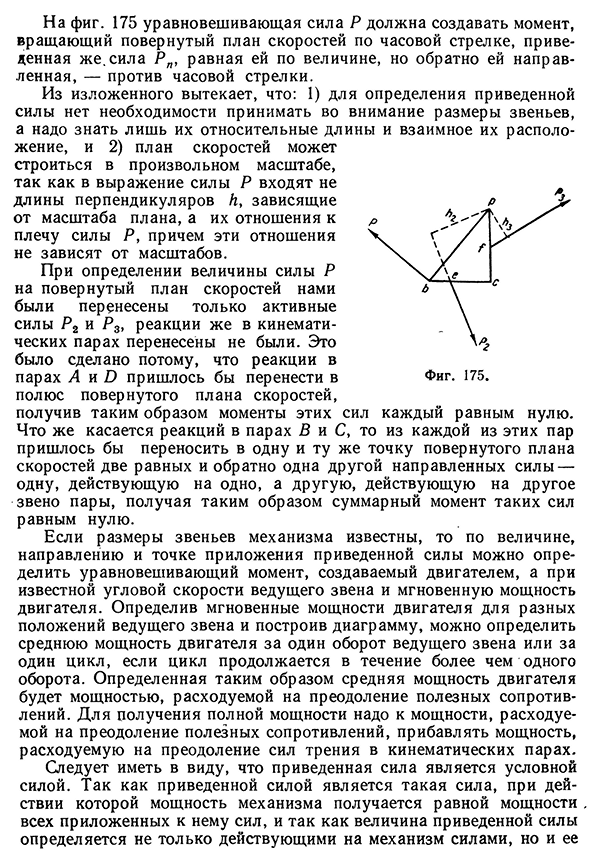
приведенная же.сила Рп, равная ей по величине, но обратно ей направленная, — против часовой стрелки. Из изложенного вытекает, что: 1) для определения приведенной силы нет необходимости принимать во внимание размеры звеньев, а надо знать лишь их относительные длины и взаимное их расположение, и 2) план скоростей может строиться в произвольном масштабе, так как в выражение силы Р входят не длины перпендикуляров /г, зависящие от масштаба плана, а их отношения к плечу силы Р, причем эти отношения не зависят от масштабов. При определении величины силы Р на повернутый план скоростей нами были перенесены только активные силы Р2 и Р3, реакции же в кинематических парах
перенесены не были. Это было сделано потому, что реакции в парах А и D пришлось бы перенести в полюс повернутого плана скоростей, получив таким образом моменты этих сил каждый равным нулю. Что же касается реакций в парах В и С, то из каждой из этих пар пришлось бы переносить в одну и ту же точку повернутого плана скоростей две равных и обратно одна другой направленных силы — одну, действующую на одно, а другую, действующую на другое звено пары, получая таким образом суммарный момент таких сил равным нулю. Если размеры звеньев механизма известны, то по величине, направлению и точке приложения приведенной силы можно определить уравновешивающий момент, создаваемый двигателем, а при известной угловой скорости ведущего звена и мгновенную
мощность двигателя. Определив мгновенные мощности двигателя для разных положений ведущего звена и построив диаграмму, можно определить среднюю мощность двигателя за один оборот ведущего звена или за один цикл, если цикл продолжается в течение более чем одного оборота. Определенная таким образом средняя мощность двигателя будет мощностью, расходуемой на преодоление полезных сопротивлений. Для получения полной мощности надо к мощности, расходуемой на преодоление полезных сопротивлений, прибавлять мощность, расходуемую на преодоление сил трения в кинематических парах. Следует иметь в виду, что приведенная сила является условной силой. Так как приведенной силой является такая сила, при действии которой мощность механизма получается равной мощности всех приложенных к нему сил, и так как величина приведенной силы определяется не только действующими на
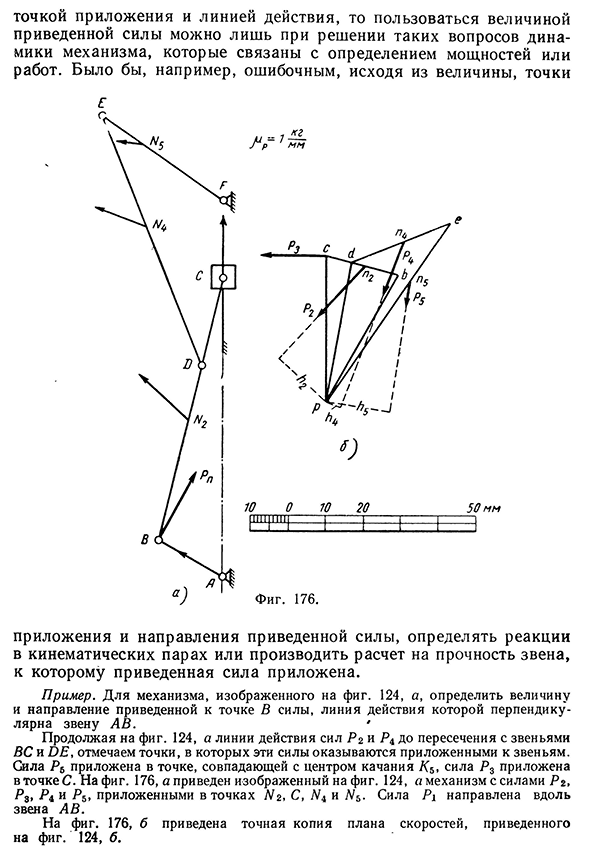
механизм силами, но и ее166 Движение и работа машин точкой приложения и линией действия, то пользоваться величиной приведенной силы можно лишь при решении таких вопросов динамики механизма, которые связаны с определением мощностей или работ. Было бы, например, ошибочным, исходя из величины, точки Е приложения и направления приведенной силы, определять реакции в кинематических парах или производить расчет на прочность звена, к которому приведенная сила приложена. Пример. Для механизма, изображенного на фиг. 124, а, определить величину и направление приведенной к точке В силы, линия действия которой перпендикулярна звену АВ. Продолжая на фиг. 124, а линии действия сил Ря и Р4 до пересечения с звеньями ВС и DE, отмечаем точки, в которых эти силы оказываются приложенными к звеньям. Сила Рб приложена в точке, совпадающей с центром качания К5, сила Р3 приложена в точке С. На фиг. 176, а приведен изображенный на фиг.
124, а механизм с силами Рг, Р3, Р4 и Р5, приложенными в точках С, М4 и N&. Сила Pi направлена вдоль звена АВ. На фиг. 176, б приведена точная копия плана скоростей, приведенного на фиг. 124, б.Приведение масс 167 Определив положения точек п2, и п5 на плане скоростей и оставив план скоростей в том виде, в каком он был получен на фиг. 124, б, переносим в эти точки векторы сил Р 2, Р и Р5, а вектор силы Р3 в точку с, параллельно самим себе, повернув их предварительно на 90° против часовой стрелки. Проведя плечи h2, h4 и h5 сил Р 2, Р& и Р5, уравнение получаем относительно ‘точки р в следующем виде РуррЬ = P2h2 + Р3рс — P4h4 — P5h5, где Рур — величина приложенной в точке в силы, уравновешивающей действие остальных четырех сил. Величины сил (см. стр. 120) : Р 2 = 18 кг, 7%= 17,5 кг, Р4 = 15,6 кг, Р5 = 7 кг. Длины плеч: h2 = 17 мм, рс = 39 мм, h4 = 4,5 мм, Л5 = 17 мм, рв » 39 мм. Подставляя численные значения, получаем Ру р-39 мм = 18 кг-17 мм 17,5 яг-39 мм — 15,6 кг-^,Ъ-мм—7 кг-17 мм, откуда Рур = 2 0 ,4 кг. Суммарный момент сил Р 2, Р3, Р4 и Р5 стремится вращать план
скоростей вокруг полюса р против часовой стрелки, поэтому сила Ру р , приложенная в точке в и направленная перпендикулярно к pb, должна создавать момент, вращающий план скоростей по часовой стрелке. Следовательно, Рур должна быть направлена от точки в вниз направо, а искомая сила Рц от точки в вверх налево. Повернув все силы на 90° по часовой стрелке и перенеся их параллельно самим себе в точки их приложения на звеньях механизма, получаем их и искомую силу Рп в виде, показанном на фиг. 176, а. Силы Pi, Р61 и Р65 не принимались во внимание, так как последние две пришлось бы приложить в полюсе р, а вектор силы Р± после поворота его на 90° оказался бы направленным по линии рв и потому также относительно точки р не создавал бы вращающего момента.
Смотрите также:
| Коэффициент полезного действия | Приведение масс |
| Уравнение движения машины | Уравнение движения точки и звена приведения |
