
Оглавление:

Регулярная прецессия гироскопа
- Как известно, сбалансированный (статический) гироскоп может выполнять регулярную прецессию по инерции без действия внешних сил. Приближенная теория показала, что прецессия вызвана только действием внешних сил. Очевидно, допущения теории приближений допускают прецессию гироскопа вплоть до нормальной прецессии, существовавшей до воздействия внешних сил. Если из за этой инерции нет начальной прецессии, теория приближений согласуется с точной теорией. Рассмотрим случай нормальной гироскопической прецессии.
Регулярная прецессия гироскопа это движение, при котором его собственное вращение и угловая скорость прецессии являются постоянными, прецессия происходит вокруг оси в определенном направлении, а угол нутации, т.е. Известно, что угол между соответствующей осью вращения и осью прецессии также постоянен. Получите формулу гироскопического момента для нормальной прецессии и изучите результаты. Гироскопический момент с регулярной прецессией Для нормальной прецессии мгновенная угловая скорость гироскопа ω = ω1 + ω2.
Определить положение точки в твердом геле и направление оси, проходящей через эту точку, если известно, что мо мент инерции твердого тела относительно этой оси является наименьшим. Людмила Фирмаль
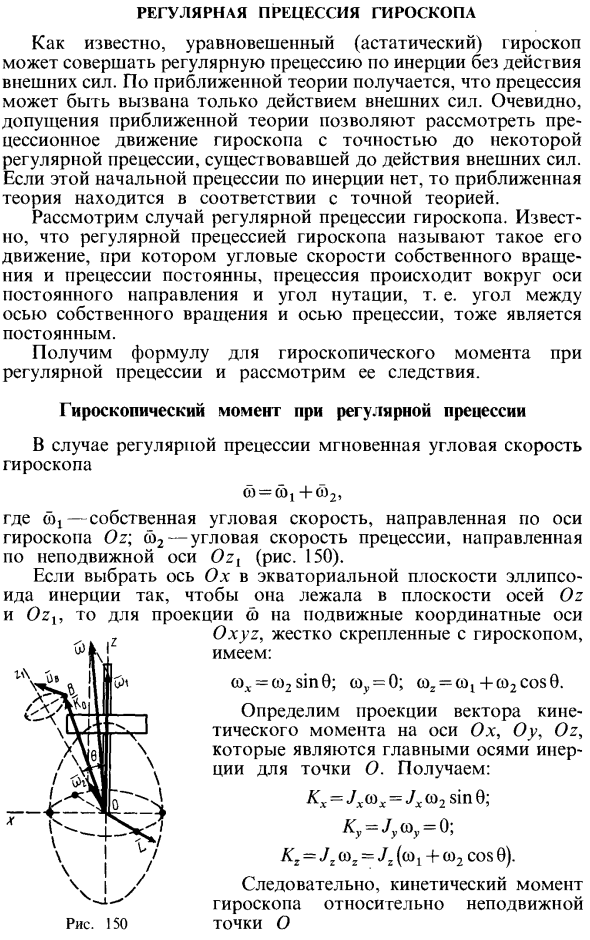
Где ω собственная угловая скорость, направленная вдоль оси гироскопа Oz. 2 угловая скорость прецессии и ориентирована вдоль фиксированной оси Ozt (рис. 150). Если вы выберете ось Ox в экваториальной плоскости эллипсоида инерции так, чтобы она находилась в плоскости оси Oz для проекции w на подвижную координатную ось Oxyz, закрепленную на гироскопе: (Ax = w2sin0; o ,, = 0; ^ = (0, + co2cos0. Определите проекцию вектора моментов движения на оси Ox, Oy и Oz, которые являются главными осями инерции точки O. Kx = Jxmx = Jx o) 2 sin 0; Ky = Jyay = 0; Kr = co = (o, + o2 cos 0).
Следовательно, гироскопический момент движения относительно неподвижной точки O R0 = Kxi + Kyj + K ^ = Jxa2smQT + J2 (o) l + co2cos0) (56) Момент гироскопа L как момент инерции гироскопа можно рассчитать по следующей формуле. L dKo dt = —jv. В нормальной прецессии co1 = const, 0 = const, o2 = const, поэтому Kx = const, ^ = 0, Kr = const, то есть вектор импульса Ko имеет постоянную абсолютную величину и направление Только изменения. Чтобы найти скорость точки B, конечной точки этого вектора, необходимо знать угловую скорость вращения вокруг неподвижной точки O этого вектора. Учитывая плоскость с осью гироскопа Oz и осью прецессии Ozx (плоскость Oxz), нормальная ось прецессии Ozt является фиксированной.
Вектор K0 в этой плоскости вращается вместе с этой плоскостью вокруг оси Ozx вдоль этой плоскости с угловой скоростью s2. Следовательно, согласно формуле, аналогичной формуле Эйлера, для скорости точки тела в сферическом движении, Jb = d2x o тогда L = yv = y2x kO = 1Oxy2. (57) Из уравнения (57) видно, что момент L перпендикулярен плоскости Oxz, в которой присутствуют векторы co2 и Co, и, следовательно, параллелен оси Oy, совпадающей с линией узлов. Подставляя значение (56) вместо Ko в (57), L = Jx co2 sin 9 (i x y2) + Jz ( o, + o2 cos 0) (g x y2). Гироскопический момент L = с2 sin 0 cos 0 + , ( ), + Co2cos0) co2 sin0 = = Jr o2 + (Jz Jx) co2 cos 0 o2 sin 0, (58) с того времени zx b2 = co2cos0; xco2 = o2sin0 и векторы (zxa2) и (Гхй2) параллельны, но в противоположных направлениях.
- После введения единичного вектора направление вектора ( xb2) является положительным L = ω, + (J. Jx) w2 cos0 (d X d2). (59) Уравнение (59) является уравнением для вектора гироскопического момента с регулярной прецессией. Как видно из (59), гироскопический момент можно разбить на две составляющие L и L . Z = xy2) = 71y1 xy2; (60) L = (JZ Jx) co2cos0 ((bi xx2). (61) Гироскопический момент L согласуется с гироскопическим моментом, полученным теорией приближения. Гироскопический момент L это коррекция гироскопического момента для точного расчета момента движения в нормальной прецессии. Момент равен нулю, если JZ = JX (эллипс инерции шар), 9 = 90 °, то есть ось гироскопа перпендикулярна оси прецессии.
Если (Jz Jx) cos0 O, L и L ориентированы в одном направлении, а если (Jz Jx) cos0 O, они ориентированы в противоположном направлении. Регулярная прецессия инерции В случае нормальной прецессии без внешней силы, то есть нормальной прецессии из за инерции, L = g = 0. Отныне учитывайте (58) L = JX (O1 + (J2 Jx) co2 cos0 o2 sin0 = O Таким образом, 62 Таким образом, если гироскоп не имеет сферической симметрии (JZ ^ JX) и ось прецессии не перпендикулярна оси гироскопа, нормальная инерционная прецессия возможна при угловой скорости, определяемой уравнением (62).
Однако если два первых приближения вычисляются достаточно просто, то при переходе к третьему приближению объем вычислений резко возрастает при незначительном уточнении результатов. Людмила Фирмаль
Известно, что из за инерции масса может двигаться с постоянной скоростью, но по прямой линии без воздействия силы, что позволяет телу вращаться вокруг фиксированной оси с постоянной угловой скоростью. В этих случаях нам нужно добавить нормальный случай гироскопической прецессии из за инерции. Поэтому нормальная прецессия обусловлена инерцией и может быть вынуждена, то есть под воздействием внешних сил. В приближенной теории рассматривается только принудительная прецессия. Точная теория нормальной прецессии рассматривает обе эти прецессии. Регулярная прецессия тяжелого гироскопа Для тяжелых гироскопов L = L o = sin0 И учитывая значение L, из (58) JjO), + (JZ Jx) o2cos0 o2sin0 = , sin0.
Следовательно, угловая скорость прецессии L 0 2 (J, Z,) cos9 Следовательно, нормальная прецессия тяжелого гироскопа возможна, когда: J2co +4 (JI Jx) P cos9 0. (64) Если величина JI ai достаточно велика, условие (64) выполняется. В этом случае используйте бином Ньютона для вычисления аппроксимации квадратного корня из (63), ограничьте его малой величиной первой степени и получите + 4 ^ J,) P cos0 = J, I l l + ^ J ff00 8 12.
Подставляя значение этого уравнения в (63), чтобы получить верхний и нижний знаки перед корнем, можно получить два приближения угловой скорости прецессии. Прецессия угловой скорости медленная прецессия. Такая угловая скорость прецессии также может быть получена с помощью теории приближений. Прецессия с угловой скоростью о ^ 2) быстрая. Получается так же как прецессия по инерции. Условие (64) тяжелого гироскопа может выполнять две медленные и быстрые прецессии, аналогично двум прецессам, рассматриваемым по угловой скорости ωV и ω ^ 2 .
Смотрите также:
Задачи по теоретической механике
| Техническое применение гироскопа | Гироскопический момент при регулярной прецессии |
| Прецессия тяжелого гироскопа по приближенной теории | Регулярная прецессия по инерции |
