
Оглавление:




Силы, действующие в механизмах
- Сила, действующая на механизм Классификация систем и сил Во время работы механизма к звену прикладывается сила для определения его движения. Сочетание сил, действующих на тело, называется системой сил. Две силовые системы называются эквивалентными. Когда воздействие на организм одинаково. Сила, эквивалентная силовой системе, называется результирующей системой. В зависимости от положения силы в системе различают пространственную и плоскую систему сил (сходимость и параллельность).
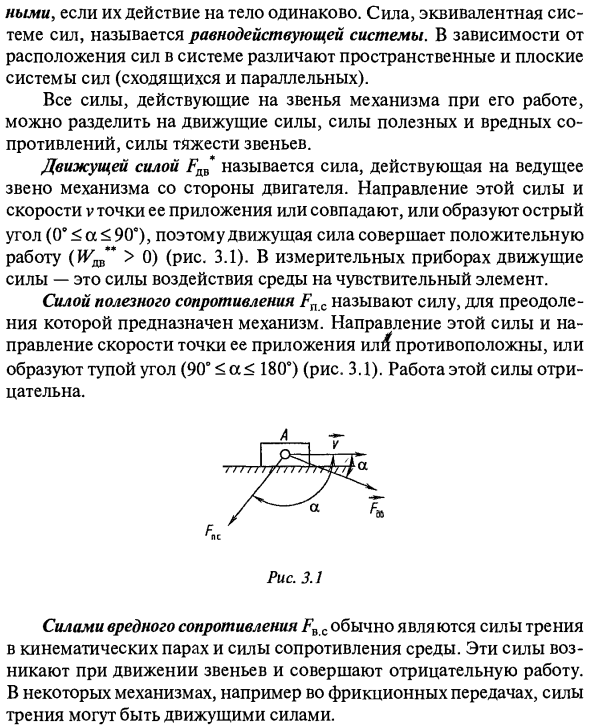
Движущая сила F ^ — это сила, которая действует на приводное звено механизма от двигателя. Направление и скорость этой силы в точке ее приложения совпадают или образуют острый угол (0 ° 0) (рис. 3.1). В измерительных приборах движущей силой является сила, действующая на чувствительные элементы в зависимости от среды. Полезная сила сопротивления Fn c — это сила, чтобы преодолеть намерения механизма.
Все силы, действующие на звенья механизма во время работы, можно разделить на движущие силы, полезные и вредные силы сопротивления и силу тяжести звена Людмила Фирмаль
Направление этой силы и Точка контроля скорости приложения противоположна или образует тупой угол (90 ° <a <180 °) (рис. 3.1). Работа этой силы отрицательна. Рисунок 3.1 Вредное сопротивление FBC — обычно сила трения движения против сопротивления среды. Эти силы возникают, когда ссылка перемещается и выполняет отрицательную работу. В некоторых механизмах, таких как фрикционные шестерни, трение является движущей силой.
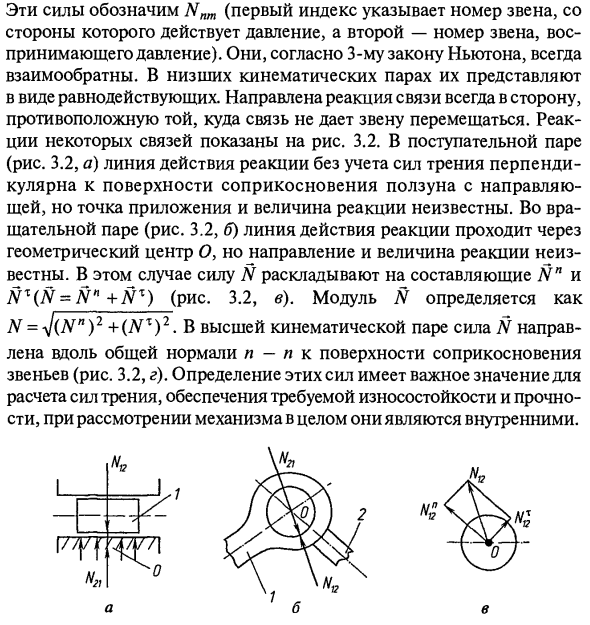
Гравитация звена применяется к центру тяжести звена. Сила взаимодействия (давление и реакция связывания) возникает между звеньями благодаря внешней силе кинематической пары.Эти силы выражены в Ннм (первый индекс показывает номер звена, на который действует давление, второй показывает номер звена, который получает давление). Согласно третьему закону Ньютона, они всегда взаимны. В нижней кинематической паре это представлено как результат. Ответ на сообщение всегда направлен в направлении, противоположном тому, что сообщение не позволяет каналу двигаться.
- Некоторые реакции связывания показаны на рисунке. 3.2. В поступательной паре (рис. 3.2, а) линия действия реакции без учета силы трения перпендикулярна поверхности контакта ползуна и направляющей, но точка действия и величина реакции неизвестны. Во вращающейся паре (рис. 3.2, б) линия действия реакции проходит через геометрический центр О, но направление и величина реакции неизвестны. В этом случае сила N разбивается на составляющие Nn и NX (N = Nn + NZ) (рис. 3.2, в). Модуль N ) 2 + (NZ) 2. В наилучшей кинематической паре сила N направлена на контактную поверхность звена вдоль общей нормали n-n (рис. 3.2, d). Определение этих сил важно для расчета силы трения и обеспечения необходимой износостойкости и прочности.
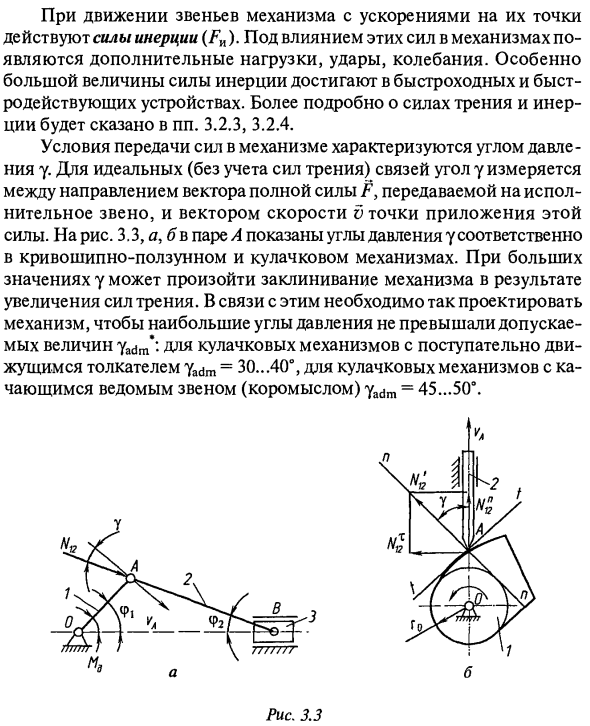
в б но Когда звено механизма движется с ускорением, на эту точку действуют инерционные силы (/ * „). При этих воздействиях в механизме появляются дополнительные нагрузки, удары и вибрации. Это особенно верно для высокоскоростных и высокоскоростных устройств, детали трения и силы инерции описаны в пунктах 3.2.3 и 3.2.4. Условие передачи силы в механизме характеризуется углом давления y.
Если рассматривать их как целостный механизм, они являются внутренними. Людмила Фирмаль
В идеальном соединении (без учета силы трения) угол y измеряется между направлением вектора полной силы F, передаваемой на привод, и вектором скорости v в точке действия этой силы. Рисунок 3.3, i, b, пара и угол давления y отображаются на кривошипно-шатунном и кулачковом механизмах соответственно. Если значение y велико, засорение механизма может произойти в результате увеличения силы трения. В связи с этим механизм должен быть спроектирован таким образом, чтобы максимальный угол давления не превышал допустимое значение yam :: для кулачковых механизмов с прогрессивно движущимися толкателями, yadm = 30 … 40 °, колеблющееся звено привода ( Yadm = 45 для кулачкового механизма с балкой). ..50 °. но 6 Рисунок 3.3
Механизм преобразует не только движение, но и силу. Соотношение между мощностью ведущего звена и ведомого звена можно найти, используя коэффициент производительности (COP), равный отношению выходной мощности (работа) к входной мощности (работа). L = Rp / Rl> (3.1) Где Yar> Rd — выходное значение рабочего звена и вала двигателя соответственно. Мощность P связана с крутящим моментом T и угловой скоростью, а отношение P = 7co, (3.2) В тех случаях, когда мощность P измеряется в ваттах (Вт), крутящий момент T равен ньютону на метр (Нм), а угловая скорость равна радианам / секунду (рад / с). Учитывая зависимость (3.1), (3.2) и передаточное число (/ = сода / С0р), получается следующее. T = Gdgg | Tru Gd-Torque — рабочая тяга и вал двигателя соответственно.
Смотрите также:
| Соотношение скоростей в высшей кинематической паре | Преобразование системы сил. Условия равновесия |
| Задачи динамики механизмов | Силы трения |
