
Оглавление:

Сложение вращательных движений твердого тела
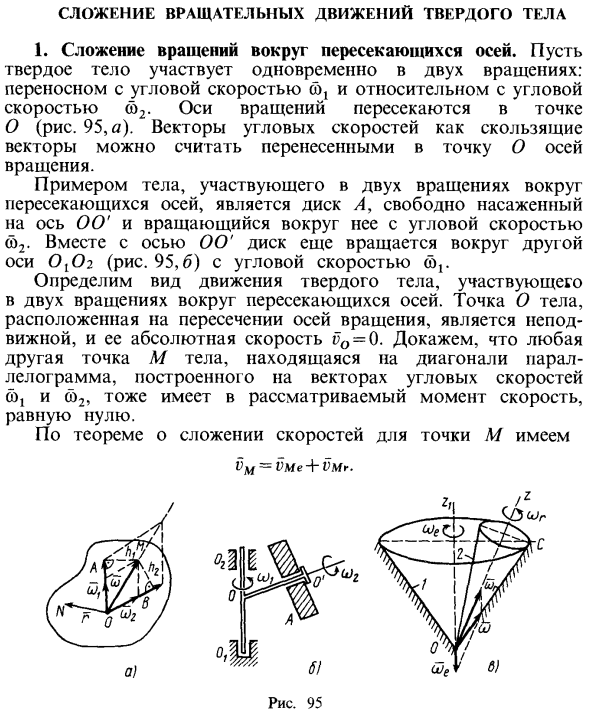
- Добавьте вращение вокруг пересекающихся осей. Пусть тело участвует в двух вращениях одновременно: движение с угловой скоростью d и движение с угловой скоростью d2. Оси вращения пересекаются в точке O (рис. 95, а). Вектор угловой скорости как вектор движения можно считать переданным в точку О оси вращения. Примером объекта, ответственного за два поворота вокруг пересекающихся осей, является диск A, который свободно установлен на оси 00 и вращается с угловой скоростью 22.
Наряду с осью 00 диск вращается вокруг другой оси OtOi (рисунок 95.6) с угловой скоростью Давайте определим тип движения твердого тела, участвующего в двух вращениях вокруг пересекающихся осей. Точка O объекта на пересечении осей вращения фиксирована, и ее абсолютная скорость равна vo = 0. Вектор угловой скорости w>! Докажем другую точку M объекта на диагонали параллелограмма, построенного в. D2 также имеет скорость, равную нулю в момент возникновения проблемы. По теореме сложения скорости в точке M Рис. 95.
В связи с отсутствием общего метода интегрирования нелинейных дифференциальных уравнений в последнее время разработаны и широко используются приближенные аналитические и графические методы. Людмила Фирмаль
Поскольку переносное и относительное движение — это вращение вокруг оси, 1’me = L1®, = 2пл. USD /; 1> мг = L2®2 = 2pl.D (? /? L /, Где d и d2 — кратчайшие расстояния от точки М до соответствующей оси вращения. Поскольку треугольники параллелограмма имеют одинаковую площадь, ome = smg. Векторы скорости yme и VMr находятся в противоположных направлениях. Следовательно, vMe = 0. Это верно для любой точки M на диагонали параллелограмма, поскольку векторную шкалу можно изменить. Скорость точки оси ОМ равна нулю. Таким образом, ОМ является мгновенной осью вращения тела в момент возникновения проблемы. То есть, если два поворота складываются вокруг пересекающейся оси, и одно является переносным, а другое — относительным, тело вращается вокруг мгновенной оси.
Чтобы определить абсолютную угловую скорость вращения вокруг мгновенной оси, выберите точку W на теле, рассчитайте эту скорость как сложную скорость движения один раз, а другую — как вращение вокруг мгновенной оси. , Согласно формуле Эйлера для вращательного движения со сложным движением, VN = VNe + VNr = aI XG + & 2XG = (®1 + II) XG. Для абсолютного вращения вокруг мгновенной оси я> N = кокср. Если скорость равна, ® = ®j + ®2, (3) Другими словами, абсолютная угловая скорость равна векторной сумме угловых скоростей вращения компонента. Последовательно применяя это дополнительное правило вращения вокруг пересекающейся оси, любое количество вращений вокруг пересекающейся оси можно заменить одним вращением, угловая скорость которого является вектором угловой скорости составляющих вращений.
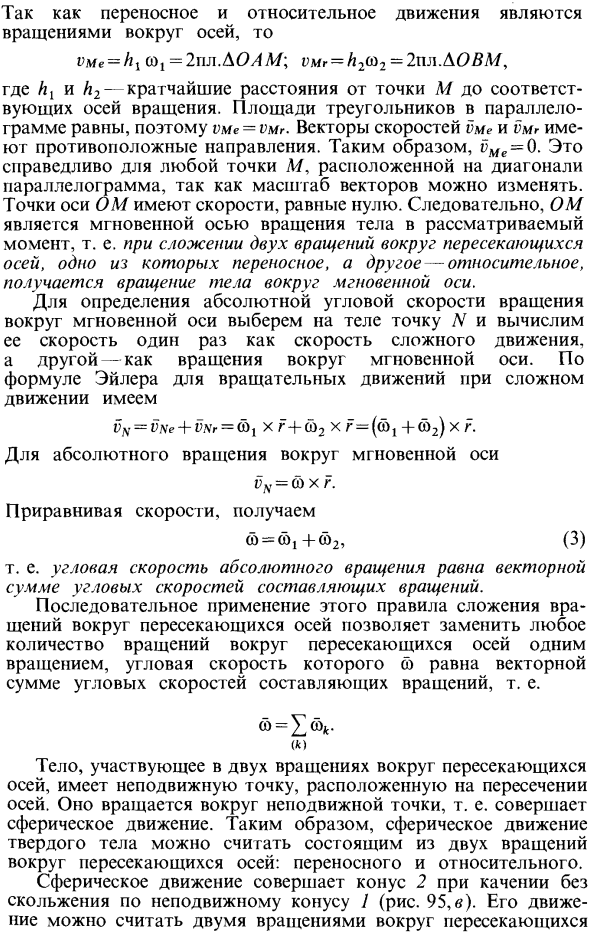
Равно сумме Тело, участвующее в двух вращениях вокруг пересекающихся осей, имеет фиксированную точку на пересечении осей. Вращается вокруг фиксированной точки. Другими словами, это перемещает сферу. Таким образом, движение сплошной сферы можно рассматривать как состоящее из двух поворотов (относительного и относительного) вокруг пересекающейся оси. Не катясь по неподвижному конусу 1, сфера движется во время катания с конусом 2 (рис. 95, в). Это движение можно рассматривать как две революции вокруг перекрестка Рис. 96 Ось. Относительное вращение происходит вокруг оси движущегося конуса Oz с угловой скоростью © „, а переносное вращение происходит вокруг оси неподвижного конуса Ozi с угловой скоростью © е. Абсолютное движение — это момент ОС с угловой скоростью Вращение вокруг оси. © = © е + ©.
Мгновенная ось ОС вращается вокруг оси неподвижного конуса Ozt с угловой скоростью, <аналогичной оси подвижного конуса Oz. Если конус разрезан по оси Ozl и части с плоскостью, перпендикулярной оси Oz, то легко перейти от движения подвижного конуса неподвижной шестерни к движению конической шестерни неподвижной шестерни. 2. Добавьте вращение вокруг параллельной оси. Три случая должны быть рассмотрены. 1) Направление вращения одинаковое. Тело участвует в двух вращениях. Переносное вращение с угловой скоростью © и относительное вращение с угловой скоростью © 2 (рис. 96, а). Таким объектом является диск, показанный на рисунке. 96 б Пересеките вертикальную ось вращения. Получите пересечение A и B, вектор угловой скорости ©! И © 2.
Сегмент геля AB в момент задачи имеет точку C с нулевой скоростью. Конечно, по теореме сложения скорости в точке C, JC = JCe + 1) Cg. Противоположная точка тела с параллельными и относительными скоростями может существовать только в сегменте AB между точками A и B. Если Bc, = t> Cr, скорость точки C равна нулю. Но «Ce =» «1 AC, vCr — a2BC, поэтому co, AC = a2BC или Прямую линию, перпендикулярную оси вращения, можно провести на любом расстоянии. Следовательно, существует ось, соединенная с корпусом и параллельная оси вращения, и скорость в этой точке в настоящее время равна нулю. Это мгновенная ось вращения в определенный момент.
- Чтобы определить угловую скорость от вращения объекта вокруг мгновенной оси, скорость B вычисляется с учетом движения B. получить >> B = >> Be + «vG < но i> Be = co1 / fS, gBr = co2bB = 0 так vB = a> iAB. Для точки 5 скорости, когда тело вращается вокруг мгновенной оси, VB = C> BC. Выравнивая скорость точки B, полученной двумя способами, По словам так k> BC = <11AB, A B = BC + AC. (4) LS = 0> 2 солнечный свет -BC + AC Yu_0> BC 1 + со2 Это C0 = C0, + C02. Уравнение (4) может быть выражено как: (5) Сан АС » Сформируйте полученное соотношение и используйте уравнение (5), чтобы получить: или Солнце AC Солнце + AC ’ Sun AC AB » Таким образом, если вы добавите два поворота тела вокруг параллельной оси в одном и том же направлении, оно будет вращаться вокруг параллельной оси в одном и том же направлении с угловой скоростью, равной сумме угловой скорости вращений компонента.
Результирующая мгновенная ось вращения разделяет сегмент Между осями вращения компонента к детали, которая обратно пропорциональна угловой скорости этих вращений внутри. Точка C этого разделения находится между точками A и B. Конечно, верно и обратное. Вращение вокруг оси с угловой скоростью ω можно разбить на два вращения вокруг двух параллельных осей с угловой скоростью Øи и 22. Объект, который участвует в двух вращениях вокруг параллельной оси, имеет плоское движение. Плоское плоское движение может быть выражено в виде двух относительных и относительных вращений вокруг параллельных осей. Плоское движение сателлитного колеса 2 вдоль неподвижного колеса 1 (фиг. 96, с) является примером движения, которое может быть заменено двумя поворотами вокруг одного и того же направления, например, против часовой стрелки, параллельной оси.
В таких случаях, а также по модулю, когда сила реакции связи в направлении зависит от приложенной силы, ее обычно прикладывают параллельно координатным осям по правилам параллелограмма. Людмила Фирмаль
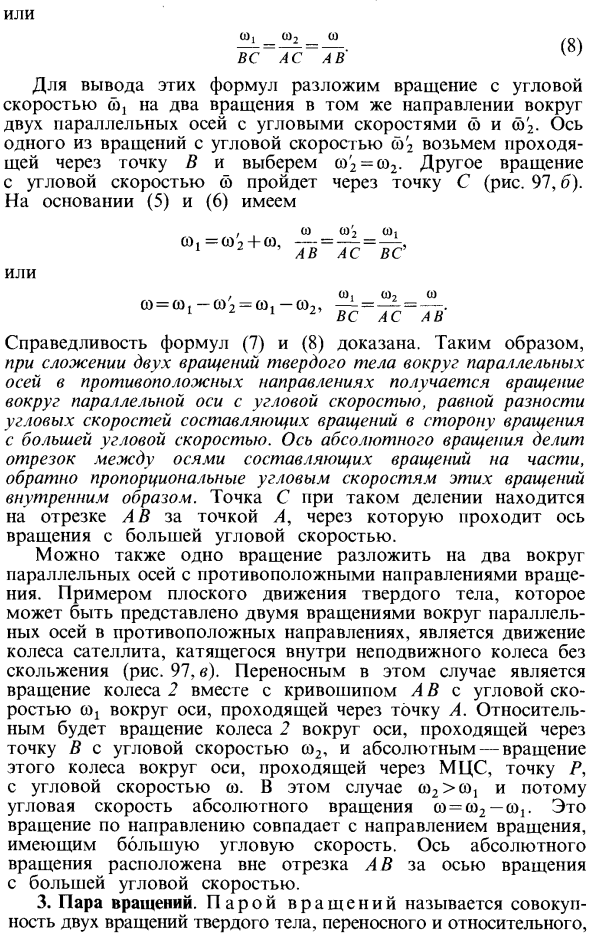
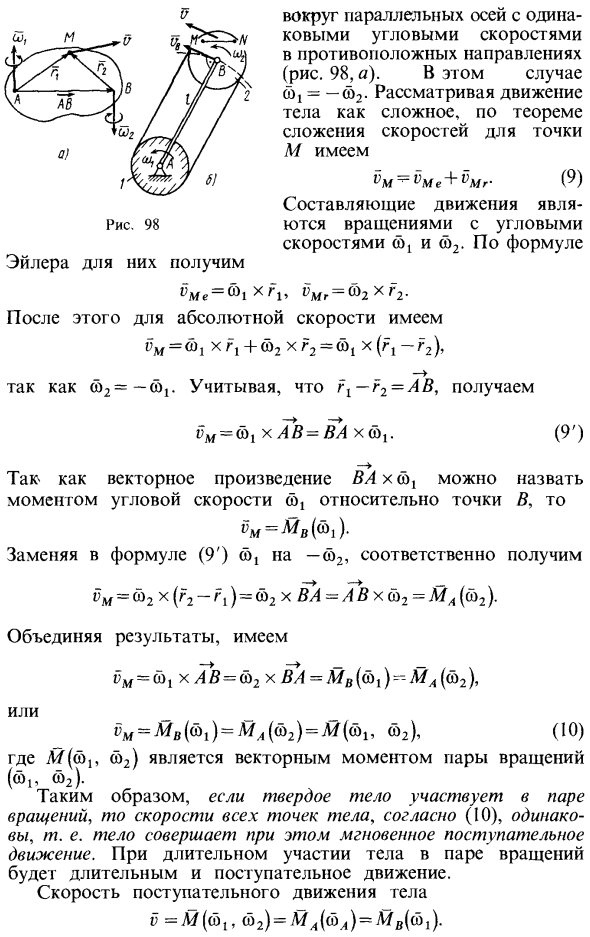
Сателлитное колесо выполняет переносное вращение вместе с относительным вращением вокруг оси, проходящей через точку B с угловой скоростью j> Рассмотрим случай со2 (рис. 97, а). Следующая формула получается: © = 0> 1, и, следовательно, Абсолютная угловая скорость вращения a> = ω2 — ω. Вращение в этом направлении совпадает с направлением вращения, имеющим большую угловую скорость. Абсолютная ось вращения находится вне сегмента AB оси вращения с высокой угловой скоростью. 3. Несколько поворотов. Пара вращений представляет собой комбинацию двух вращений, переносимых и относительных. и Рисунок 98 Эйлер для них Вокруг параллельной оси с одинаковой угловой скоростью в противоположном направлении (рис. 98, а). В этом случае w2 = -w2.
Учитывая, что движение тела является сложным, добавив теорему о скорости точки M, «M = iMe + ym. (9) Компоненты движения — угловая скорость © и вращение 2. 2. Согласно формуле * ’Me = ®1X’G1” yMg = (b2XG2. Тогда для абсолютной скорости, 22 = — © П. Если r1-r2 = AB, vM = > 1) — / / ((22), или хм = л? в (d1) = A? и (d2) = L / (d1, d2), (10) Здесь 77 (((, 22) — векторный момент вращающейся пары („22). Следовательно, если тело участвует в паре вращений, согласно (10), скорость всех точек объекта одинакова. Другими словами, объект выполняет мгновенное поступательное движение. Если тело участвует в паре вращений в течение длительного времени, движение вперед становится длиннее.
Скорость перевода тела v = M (at, d2) = M? ((Yl) = L? In (d |)) Он равен векторному моменту пары вращений и также может быть выражен как векторный момент одной из угловых скоростей для нескольких точек на оси вращения тела. Другая угловая скорость включена в пару вращений. Скорость перемещения объекта, участвующего в паре вращений, зависит только от характеристик пары вращений. Нормально к паре осей вращения. Число может быть выражено как l> = (01J = 0) 2J, (11) d — кратчайшее расстояние между парой осей или парой плеч. Вращающаяся пара похожа на пару сил, действующих на твердое тело. Угловая скорость вращения тела является вектором движения, как и сила. Векторный момент пары сил является свободным вектором.
Пара моментов вращения вектора имеет сходные характеристики. Устройство, состоящее из неподвижного 1 зубчатого колеса и подвижного 2 зубчатого колеса, соединенного цепью (рис. 98.6), может ясно показать эквивалентность пары вращения и перемещения. Когда кривошип AB вращается вокруг оси, проходящей через точку A, шестерня 2 включается в два поворота вокруг параллельных осей. Можно переносить с помощью кривошипа и относительно оси, проходящей через точку B. Их угловые скорости одинаковы.
Скорость всех точек на шестерне 2 равна скорости точки B и всегда равна »8 = / co1, когда эта шестерня движется. Если линейный сегмент MN зафиксирован с помощью шестерни 2, он будет параллелен исходному положению, даже если механизм движется. москиты Прикрепив чашку к подвижному зубчатому колесу, если эта горизонтальная часть соединяется с дном чашки водой, вода не будет вытекать из чашки при перемещении механизма в вертикальной плоскости. В переводе траектория всех точек на теле одинакова. Точка B представляет круг радиуса /. Траектории всех других точек в движущемся механизме также являются кругами с таким же радиусом. Тело, участвующее в паре вращений, совершает плоское поступательное движение.
Смотрите также:
Задачи по теоретической механике
| Сложение движений твердого тела | Сложение вращений вокруг пересекающихся осей |
| Сложение поступательных движений твердого тела | Сложение вращений вокруг параллельных осей |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
