
Оглавление:

Теорема о движении центра масс системы
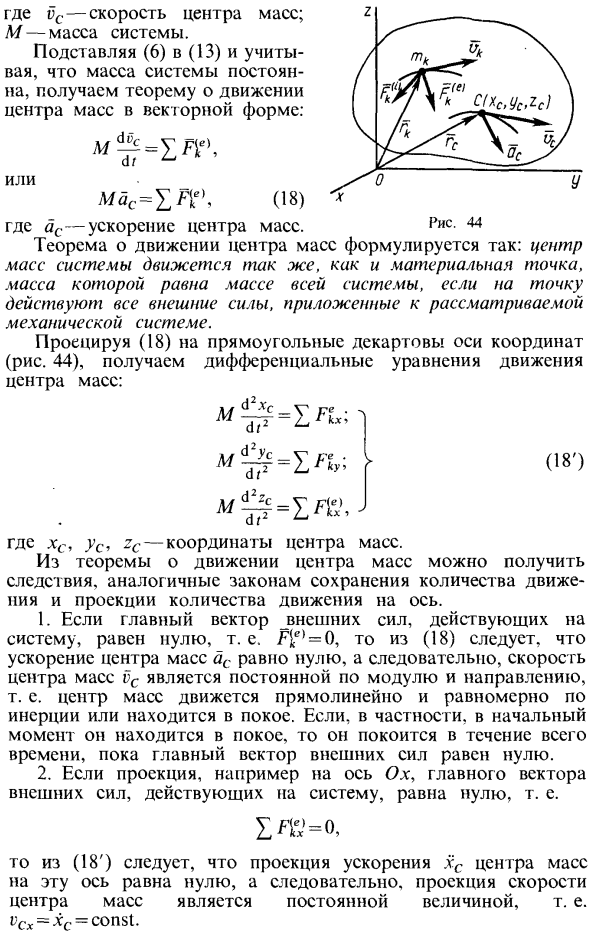
- Результатом теоремы об изменении импульса системы является теорема о движении центра тяжести системы. DQ / dt ^^ — по теореме об изменении импульса системы (13) Однако величина перемещения системы может быть рассчитана по уравнению (6). Где vc — скорость центра тяжести. z M — масса системы. Подставляя (6) в (13) и учитывая, что масса системы постоянна / включена, получим теорему движения / центра масс в векторном виде. 1 MdA.Vrl- ’. (18) где ac — ускорение центра тяжести. Рисунок 44 Теорема о движении центра тяжести формулируется следующим образом: Центр тяжести системы движется аналогичным образом.
Если все внешние силы, приложенные к рассматриваемой системе машины, действуют на точку, ее масса равна материальной точке, которая равна общей массе системы. Проекция (18) на декартовы декартовы оси (рис. 44) дает дифференциальное уравнение для движения центра тяжести. > (18’1 где xc, усы, zc — координаты центра тяжести. Из теоремы о движении центра тяжести можно получить те же результаты, что и закон сохранения импульса и закон проекции импульса на ось. 1. Когда главный вектор внешней силы, действующей на систему, равен нулю, то есть E ^ e) = 0, ускорение центра тяжести ac равно нулю из (18), поэтому скорость центра тяжести vc постоянна.
В этот момент достигается предел упругости, и эллиптический фазовый локус начинает протекать через пластическую область фазовой плоскости, где угловой коэффициент восстанавливающей силы равен С2. Людмила Фирмаль
Модуль и направление, то есть центр масс, движутся по инерции линейно и равномерно или являются стационарными. В частности, при скашивании в первый момент он отдыхает до тех пор, пока главный вектор внешней силы не станет равным нулю. 2. Если проекция главного вектора внешней силы, действующей на систему, например на ось Ox, равна нулю, ELech ‘= o, Из (18 ‘) проекция ускорения центра масс xc на эту ось равна нулю, поэтому проекция скорости центра масс является постоянной, то есть pCx = lc = const. Кроме того, в первый момент, если vCx = 0, xc = const, то есть координата xc центра масс ns изменяется по мере движения системы. Внутренние силы явно не влияют на движение центра тяжести.
Рисунок 45 Они могут влиять только неявно, Через внешнюю силу. В результате невозможно вывести из равновесия или изменить центр тяжести системы только с помощью внутренних сил без внешних сил. Однако внутренние силы неизолированной механической системы создают движения отдельных частей системы, вызывая взаимодействие с внешними объектами, вызывая внешние силы для реакций связывания и изменяя активные силы. В результате движение центра тяжести изменяется или баланс теряется. Люди должны стоять на абсолютно гладкой горизонтальной поверхности рядом с телом, приклеенным к этой плоскости.
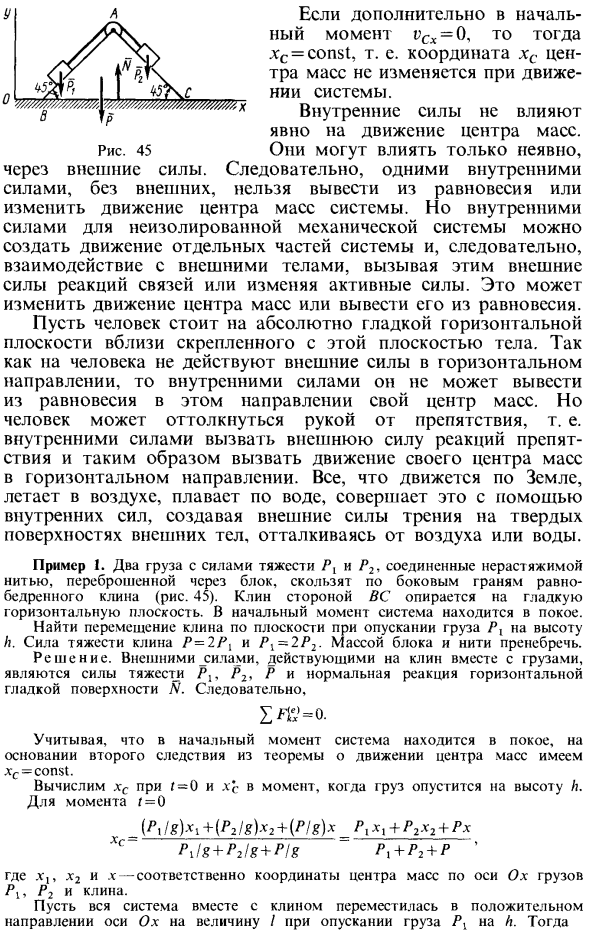
- Поскольку внешняя сила не действует на человека в горизонтальном направлении, человек не может сбалансировать центр тяжести в этом направлении с внутренней силой. Однако люди могут убрать руки с препятствий. Другими словами, внутренняя сила может заставить внешнюю силу реагировать на препятствие и перемещать центр тяжести горизонтально. Все, что путешествует по земле, летит в воздухе и плавает в воде, делает это с помощью внутренних сил, начиная с воздуха или воды и создавая внешнюю силу трения на твердой поверхности внешнего объекта. Пример 1. Две нагрузки, гравитация P и P2, соединены нерастяжимой нитью, проходящей через блок, и скользят вдоль боковой части равнобедренного клина.
Клиновая сторона самолета находится на ровной горизонтальной поверхности. В первый момент система остановлена. Если мы уменьшим нагрузку P до высоты L, мы найдем смесь клиньев вдоль плоскости. Гравитация клина P = 2PX и PX = 1P2. Массы блоков и нитей игнорируются. Решения. Внешняя сила, действующая на клин вместе с нагрузкой, является силой тяжести P2. Нормальная реакция P2, P и горизонтальной гладкой поверхности /? так NJM Учитывая, что система не работает в первый момент, Основываясь на втором следствии теоремы о движении центра тяжести, Вычислите xc при r = 0 и вычислите Xc в тот момент, когда нагрузка падает до высоты L. {Pllg) xi + (P2lg) x2 + (Plg) XP, Xi + P1X2 + PX Я \ lg.
В классической механике, основанной на аксиоме Ньютона, пространство рассматривается как трехмерное евклидово пространство, природа которого не зависит от движения в нем материальных объектов. Людмила Фирмаль
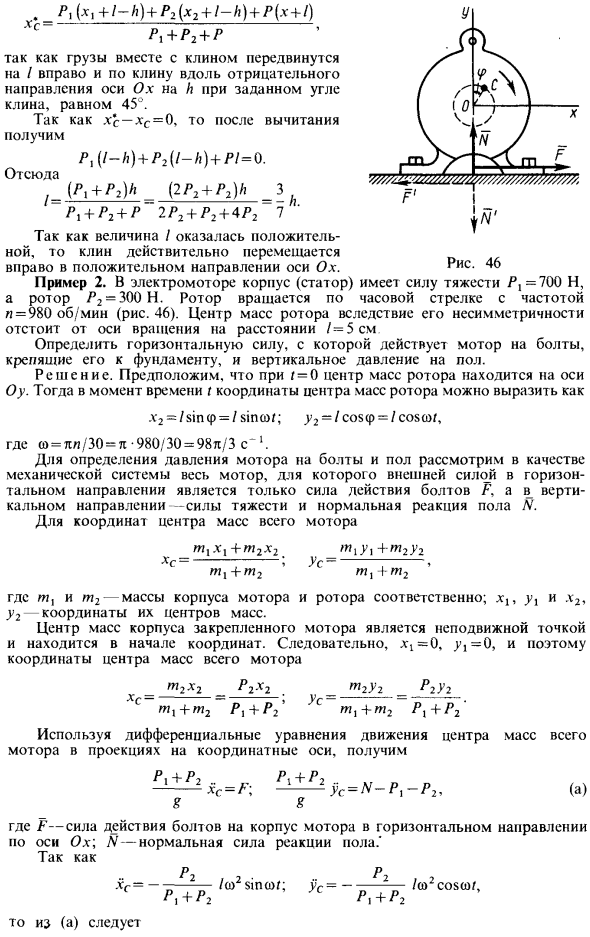
Кординаты центра тяжести по оси О груза соответственно С помощью клина система переместила значение I в положительном направлении оси Ox, когда нагрузка P была снижена на h. тогда л-ч) + р (х + л) , /> 1 (x1 +/- L) + / ’2 (л Xc ~ P, + P2 + P По мере того, как товары движутся вправо / к клину и движутся вдоль клина вдоль отрицательного направления оси Ox вдоль клина с углом клина 45 °, P, (l-h) + P2 (l-h) + PI = 0 Отсюда /. (/ ’| + /> R) L = (gL + ^ a) * P, + P2 + P 2P2 + P2 + 4P2 Поскольку количество / оказалось положительным, Клин фактически перемещается вправо в положительном направлении оси Ox. Пример 2. Корпус электродвигателя (статор) Pt = ‘IW N Ротор P2 = 300н.
Ротор вращается по часовой стрелке с частотой n = 980 об / мин (Рисунок 46). Центр тяжести из-за асимметрии ротора находится на расстоянии 1 = 5 см от оси вращения Определяется горизонтальная сила, действующая на болт, которым двигатель крепится к фундаменту, и вертикальное давление на пол. Решения. Пусть / = 0 и центр тяжести ротора находится на оси Oy. Далее, в момент времени t координаты центра тяжести ротора могут быть выражены как: x2 = / sinφ = / sinω «; y 2 = 1 coscp = / coscot. Здесь ω = li / 30 = i-980/30 = 98l / 3s * ′.
Чтобы определить давление двигателя на болт и пол, весь двигатель, горизонтальная внешняя сила которого является действием только болта F, считается механической системой. О координатах центра мА Где t и t2 — массы корпуса двигателя и ротора соответственно. у2 — координаты центра тяжести. Центр тяжести неподвижного корпуса двигателя является фиксированной точкой и находится в начале координат. Следовательно, X] = 0, 3’1 = 0, поэтому координаты двигателя Используйте уравнение уравновешивания для всех центроидов Проекционный мотор на осях получим P, + P2 P1 + P2 .. „ -2- xc = F; ——— yc = N — P, -P2. г г Где F — приложенное усилие болта корпуса двигателя в горизонтальном направлении вдоль Oh.
Смотрите также:
Задачи по теоретической механике
| Теорема об изменении количества движения системы | Дифференциальные уравнения поступательного движения твердого тела |
| Законы сохранения количества движения | Теорема об изменении кинетического момента |
