
Оглавление:

Трение гибких тел
- Если идеально гибкое и нерастяжимое тело, т. е. тело, совершенно не деформирующееся под действием растягивающей силы и не оказывающее никакого сопротивления при его перегибе, огибает неподвижный цилиндр, охватывая его по дуге ab с центральным
углом а (фиг. 151), и находится под действием сил и S2, то для движения его по цилиндру с равномерной скоростью необходимо соблюдение условия. где F — сила трения между гибким телом и цилиндром.140 Трение в кинематических парах
Так как сила трения распределена на дуге ab соприкосновения гибкого тела с цилиндром, Людмила Фирмаль
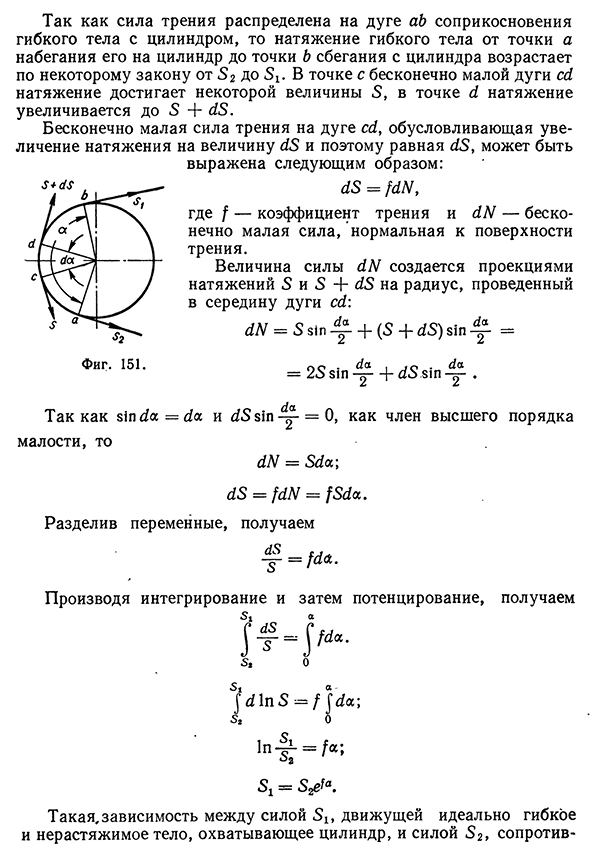
то натяжение гибкого тела от точки а набегания его на цилиндр до точки b сбегания с цилиндра возрастает по некоторому закону от S 2 до Si. В точке с бесконечно малой дуги cd натяжение достигает некоторой величины S, в точке d натяжение увеличивается до S + dS. Бесконечно малая сила трения на дуге cd, обусловливающая увеличение натяжения на величину dS и поэтому равная dS, может быть выражена следующим образом: dS = fdN, где f — коэффициент трения
и dN — бесконечно малая сила, нормальная к поверхности трения. Величина силы dN создается проекциями натяжений S и S + dS на радиус, проведенный в середину дуги cd: dN = S sin-у -+ (S + dS) sin-у = — 2S sin -у + dS.sin -у . Так как sin da. = da. и dSsin-y = 0, как член высшего порядка малости, то dN = Sda; dS = fdN = fSda. Разделив переменные, получаем Производя интегрирование и затем потенцирование, получаем •Sj ft к к Si о p i n S = /J d a ; Si 0 ln-^= fa; Sx
- = SJ*. Такая, зависимость между силой Sj, движущей идеально гибкое и нерастяжимое тело, охватывающее цилиндр, и силой S 2, сопротив-Трение качения 141 ляющейся движению, была установлена выдающимся ученым, членом Российской академии наук Л. Эйлером. На основании формулы Эйлера сила трения на поверхности соприкосновения гибкого тела и охватываемого им цилиндра равна F = S1 S 2 = S2 { ^ 1 ) . Как показывает формула, величина силы трения в значительной степени зависит и от коэффициента трения, и от угла охвата; нетрудно убедиться, сделав соответствующие подстановки в формулу Эйлера, что при f = 0,35, обмотав гибкое тело вокруг
цилиндра на четыре полных оборота (а = 8тс), силой 1 кг можно уравновесить силу 6500 кг. При расчете ременной передачи приходится иметь дело приблизительно со следующими величинами: f 0,35; а = тс. При таких величинах натяжение ведущей части ремня, увлекающей ведомый шкив во вращение, получается приблизительно в 3 раза большим натяжения ведомой части. Однако при расчете ременной передачи формулой
Эйлера нельзя пользоваться без существенных эмпирических поправок. Людмила Фирмаль
Необходимость в таких поправках проистекает, во-первых, из того, что ремень не является идеально гибким и нерастяжимым телом, и, во-вторых, из того, что при вращении шкива ремень подвергается действию центробежной силы, уменьшающей давление ремня на шкив и тем, следовательно, уменьшающей силу трения.
Смотрите также:
| Трение скольжения несмазанных тел | Трение качения |
| Трение скольжения смазанных тел | Коэффициент полезного действия |
