
Оглавление:

Тяжелое тело вращения, скользящее без трения по неподвижной горизонтальной плоскости
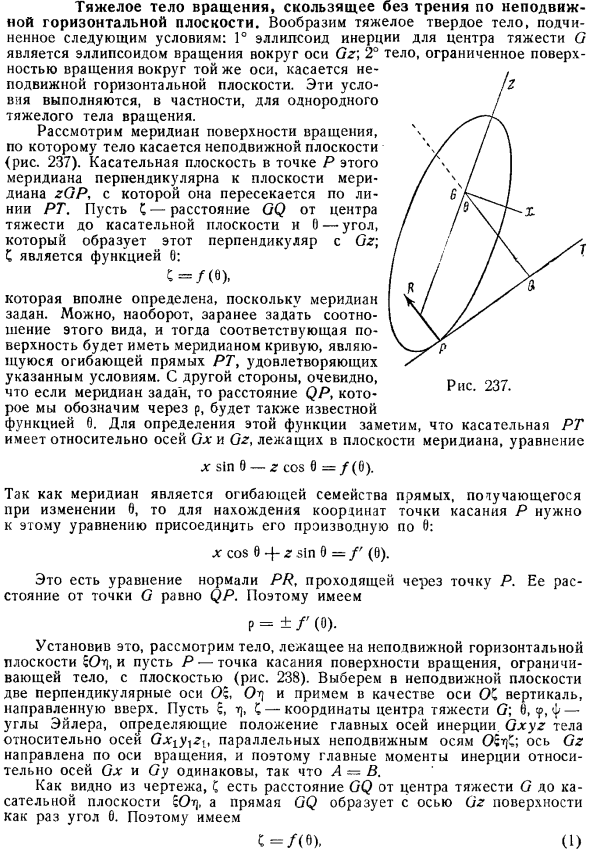
- Представьте себе, что тяжелое твердое тело подвергается воздействию следующих условий: эллипсоид инерции 1 центроида G является сфероидом, центрированным на оси Gz. Объект, окруженный плоскостью вращения вокруг той же оси, является бесконтактным. Подвижная горизонтальная поверхность. Это здорово wii, в частности, такого же рода Тяжелое вращение тела. Т Рассмотрим Меридиан S вращающейся плоскости. При этом объект касается неподвижной плоскости Рис. 237. Касательная плоскость в точке P этого меридиана перпендикулярна плоскости MER h I. Диана ЗГП, пересекает его вдоль Nynn RT. пусть C расстояние от центра тяжести до касательной плоскости GQ, 0 угол, Он образует эту вертикаль с Gz. Д.
C функция 0: z y t в в Х Меридиан были четко определены Набор. Напротив, вы можете заранее установить отношения Такого рода решение и соответствующее X Поверхность имеет меридиональную кривую. Это прямолинейная огибающая ПТ, удовлетворяющая заданным условиям. Между тем, очевидно, Р, 7 Если указан Меридиан, то расстояние QP, которое является kis Покажите стадо с помощью p это также хорошо известно function. To определим эту функцию уравнениями для осей Gx и Gz, где касательная PT находится в плоскости Меридиана х Sin 9 р от COS б = с. Так как меридиан является огибающей семейства прямых, полученных изменением in, то для нахождения координат касательной P.
Если некоторые из связей зависят от времени, то работа соответствующих реакций связей на действительном перемещении будет, вообще говоря, отлична от нуля. Людмила Фирмаль
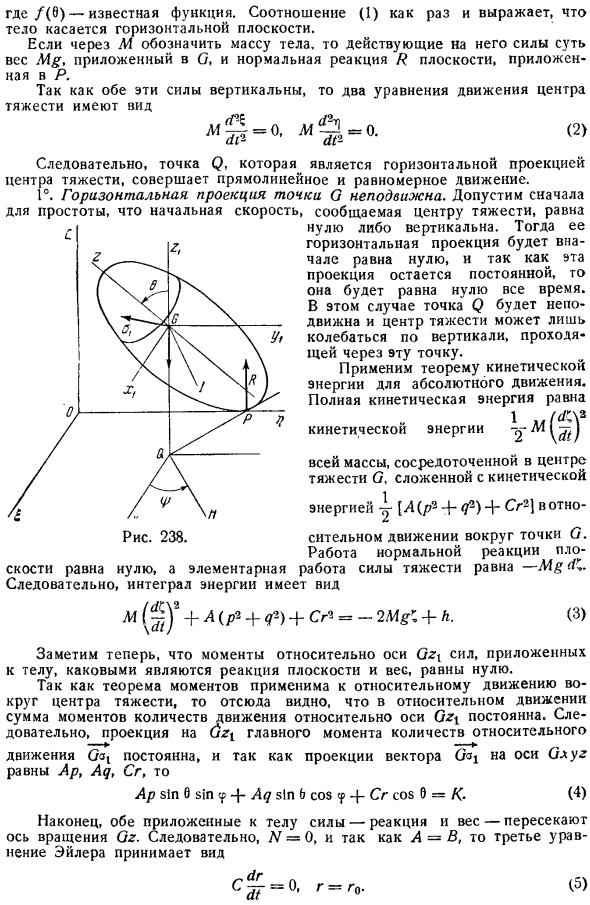
Необходимо добавить производную по отношению к in к этому уравнению. х в COS 9 + Р грехе 0 = 0. Это обычное уравнение PR, которое проходит через точку P. расстояние от точки G равно QP. Поэтому мы имеем = 0. Установив это, рассмотрим объект, лежащий в неподвижной горизонтальной плоскости 5Och, и пусть P точка соприкосновения вращающейся плоскости с плоскостью сопряжения рис. 238. в неподвижной плоскости выделим 2 вертикальные оси 05.O вертикальное направление это ось O.
C координата центроида G. B, y, C угол Эйлера, определяющий положение инерционного шпинделя. Gxyz тела относительно оси GX y z параллельно неподвижной оси, ось Gz направлена вдоль оси вращения, поэтому основные моменты инерции вокруг оси Gx и Gy одинаковы, поэтому a B одинаковы. Как вы можете видеть, C это расстояние GQ от центра тяжести G до касательной плоскости 60t .Прямая линия GQ образует только оси Gz и угол 6 поверхности. Где f c известная функция.
Соотношение 1 представляет тело, соприкасающееся с горизонтальной поверхностью. Когда M представляет собой массу объекта, сила, действующая на него, является весом Mg, приложенным к G, и нормальной реактивной силой R приложенной плоскости. Поскольку обе эти силы являются вертикальными, то 2 уравнения движения центра РГ Итак, точка Q, являющаяся горизонтальной проекцией центра тяжести, совершает прямое и равномерное движение. 1.Горизонтальная проекция точки G неподвижна. Если он сначала сообщается центру тяжести, он равен нулю или вертикали.
Тогда его горизонтальная проекция изначально будет равна нулю, а проекция будет такой же, как и в случае точки, и центр тяжести будет мешать перпендикулярно, проходя через эту точку i. Примените теорему о кинетической энергии к абсолютному движению. Полная кинетическая энергия 2 Г. Скорость хорошая. Следовательно, Интеграл энергии Кинетическая энергия Сосредоточьтесь на центре тяжести G всей массы и совершите относительное движение вокруг точки, объединив кинетическую энергию J Л р2Ц tfi + Cf .Работа нормальных P гравитационных реакций Mg d ,.
Прилагается Примечание Ноль для тела, являющегося реакцией плоскости и веса, равен нулю. Поскольку теорема о моменте применима к относительному движению вокруг центра тяжести, сумма моментов импульса относительно оси Gzi постоянна в относительном движении. Таким образом, проекция относительных величин на моменты Дипломатическая связь постоянна. Проекция вектора Gi на ось Olug АР, Ад, СГ 4 4 0 Пересечение 3 го уравнения Реакция. Наконец, обе оси вращения ГЗ. Эйлер соглашается.
Где a и p произвольные константы 2 формула для определения O 6 имеет вид Функция времени. Затем 7 Если убрать из обоих выражений 6 14 s 2 0 sms Q 0 af 0 Sin20 tr0 cos0 0 8 откуда t выражается в 8 с помощью квадратуры. Если 6 является рациональной функцией sin 0 и cos0, если TG y является независимой переменной, то эта квадратура является суперэллипсоидом. Угол, начинающийся со значения 0 8, в правой части уравнения равен 0 = a a 0 sin2 8 BHA cos 8 3 Положительный. 6 указывает расстояние от центра тяжести до неподвижной плоскости, поэтому эта функция всегда будет оставаться конечной.
Назначьте значения 0, 60 и функции 8 вместо 6.Тогда для функции Ф 8 мы получим знак, 4, поскольку начальное значение 60, очевидно, дает нам действительное число 8.So, значение 60 находится между 2 действительными корнями и 8.Поэтому анализ задачи аналогичен детальному анализу, выполненному в предыдущей главе для движения тяжелых ротаторов вокруг 1 точки оси. Исключение dt также может быть использовано для определения и у функции 0 с помощью квадратуры. Кривая, нарисованная на плоскости точкой соприкосновения.
Так как точка Q, как предполагается, является фиксированным, его можно считать происхождение в полярной системе координат, где полярная ось QX является параллельной оси с GX .Радиус вектор QP = p является известной функцией от 8. П = 6. Она определяется формой плоскости вращения, в которой тело соприкасается с плоскостью. Полярный угол x = XOR равен 4 +. фактически плоскость GQP совпадает с плоскостью, в которой ось вращения проецируется на горизонтальную плоскость, то есть плоскость A10r. однако Нормаль GI этой плоскости образует ось Gxi и угол.
- Таким образом, нормаль к радиус вектору QP QH. На горизонтальной плоскости QX он образует угол, равный, а угол XQP = y фактически равен +.И так оно и есть. РФ п БР потому что Флорида ДТ Ди грех ФЛ 9 Удаление dt из этого выражения и выражения 8 позволяет получить y в функции 6 с помощью квадратуры. потому что p связано с fl известной формулой p = 0, используя другую квадратуру. Также в функции п. 2.Общий случай. Мы предположили, что точка Q является fixed. In в общем случае эта точка совершает прямолинейное равномерное движение.
Далее мы изучаем движение тела относительно осей Q, X, Y, zt. Эти оси имеют определенное направление, начиная с точки Q. эти оси выполняют линейные и равномерные геометрические движения. Таким образом, относительное движение тела выражается тем же уравнением, что и абсолютное движение N. 334.в этом относительном движении горизонтальная проекция центра тяжести Q всегда находится в начале координат, поэтому задача ограничена случаем, о котором мы сейчас думаем. Образцы. Топ Геннадьевна.
Если связи не зависят от времени и отсутствует трение, то дифференциал кинетической энергии равен сумме элементарных работ заданных сил. Людмила Фирмаль
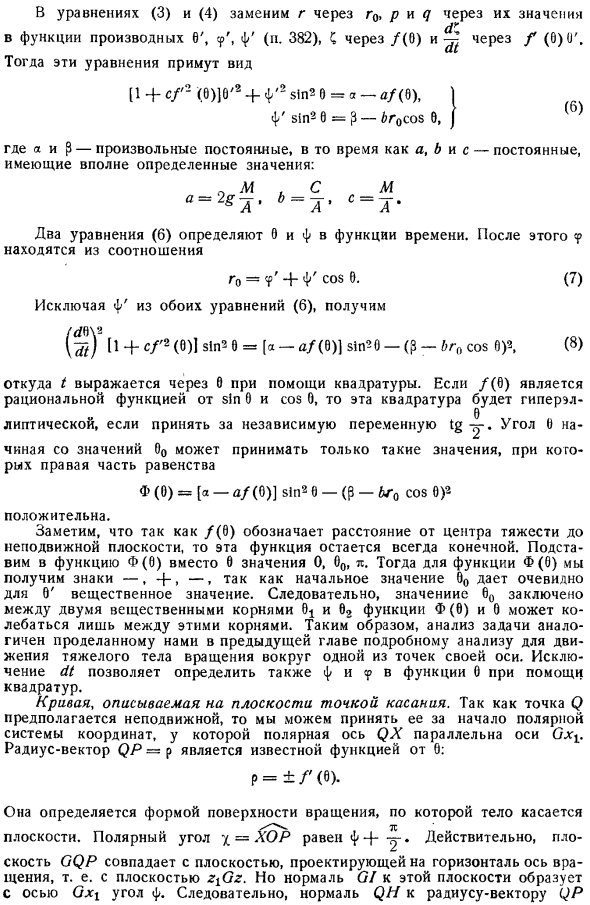
Верхняя часть представляет собой тяжелое вращающееся тело, наклоняющее 1 свою точку, например, р на неподвижную горизонтальную плоскость. Эту точку можно рассматривать как сферу бесконечно Небольшой радиус вокруг точки P рис. 239, а. Затем тяжелое тело касается этой сферой горизонтальной поверхности. Расстоянии c = GQ это определяемая по формуле здесь С = cosfl Z длина GP. Тогда P = Qп = slnfl. Учитывая это, в предыдущем выражении нужно ввести 0 = I cos fl, p = sin fl. Тогда правая часть уравнения 8 становится многочленом 3 го порядка относительно cos0.Это соответствует тому, что найдено в задачах Лагранжа и Пуассона.
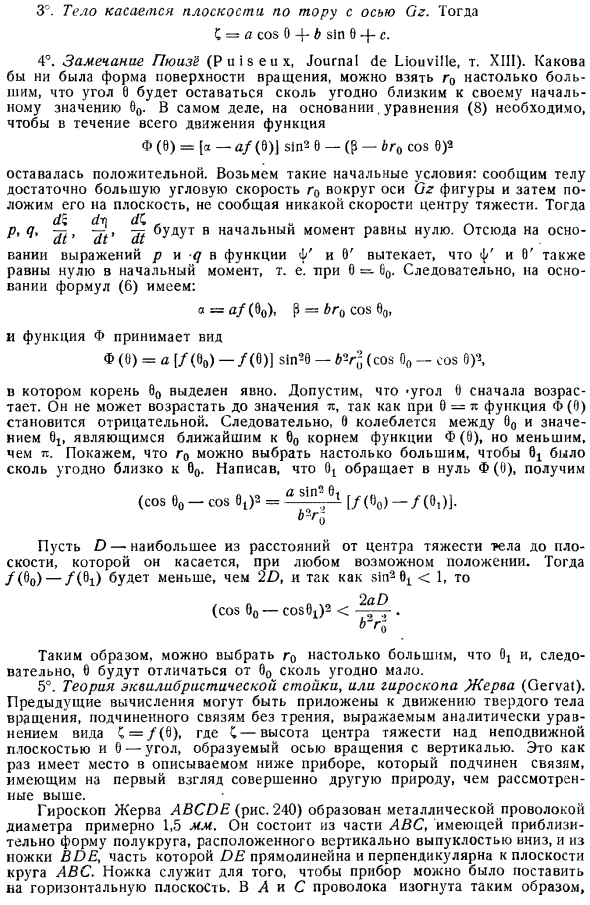
Монета радиуса I, скользящая без трения по неподвижной горизонтальной поверхности, представляет собой вращающееся тело, соприкасающееся с плоскостью на поверхности, вырождающейся в круг рис. 239, б. Ось поверхности представляет собой Нормаль Gz плоскости монеты, а Меридиан точку circle. In в рассматриваемом деле имеются: 3.Тело контактирует плоскость вдоль Тора с осью GZ. И затем… C = A cos0 + b sin 0 4 s. 4. Puzvous замечания Пуис ЕС, Журналь де Лиувилля, объем. ТРИНАДЦАТЫЙ. Какой бы ни была форма плоскости вращения, R0 может быть принято очень большим, поэтому угол B остается сколь угодно близким к исходному значению 0. по сути, он основан на.
Функция требуется в течение всего движения выражения 8 0 = a af 0 sin3 B br0 cos 0 a Она оставалась позитивной. Примем эти начальные условия: сообщим телу достаточно большую угловую скорость движения вокруг оси GZ фигуры, причем в плоскости, не перенося скорость на центр тяжести. После этого он будет равен нулю в первый раз. Из этого, исходя из формул p и q, и 0, и 0 so Первая электронная. Ноль= 0. 0 Да. Поэтому, основываясь на Формула 6 = ля. = br0 потому что Е0.
Функция f принимает вид =а 0О 0 sln50 Iflt cos0O cos0 Маршрут 0o назначается явно. Предположим, что угол 0 увеличивается первым. Поскольку функция 0 отрицательна при 0 = x, она не может быть увеличена до значения x. таким образом, 0 колеблется между 0 и значением 0t. это корень функции 0, который ближе всего к 0, но меньше x. оможно указывает, что 0T используется произвольно и 01 может быть выбран таким большим, что он становится нулем 0.
Возможное положение f 0 так как 1 меньше 2D, а sin2 0×1, то максимальное значение расстояния от центра тяжести контактирующей кости равно O COS0 COS0l 3. Таким образом, вы можете выбрать больший r0 равным 0 таким образом, 0 будет сколь угодно малым, в отличие от 60. 5.Теория стойки баланса, или гироскоп Gervat. Предыдущий расчет может быть применен к движению вращающегося тела, которое подчинено движению без трения coupling. It аналитически выражается в уравнении вида C = 0.Где C высота центра тяжести на неподвижной плоскости, а 0 угол, образованный вертикальной осью и осью вращения.
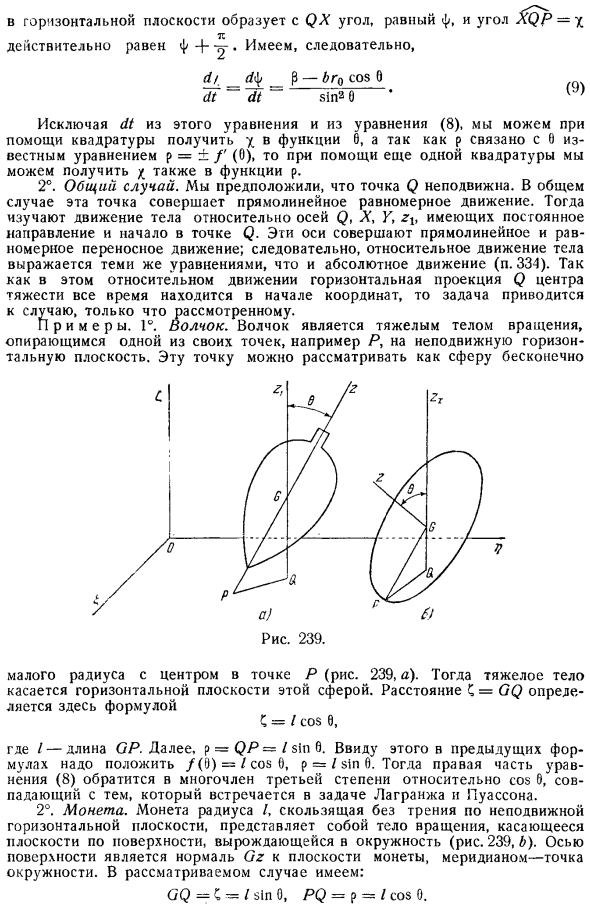
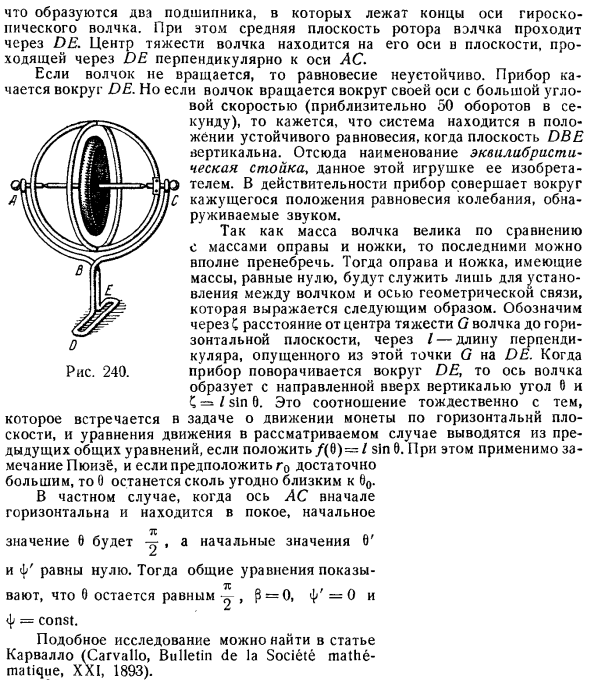
Это происходит с устройствами, описанными ниже, которые подчинены связи, которая имеет совершенно иной характер, чем то, что рассматривается на первый взгляд. Гироскоп ABCDE gyroscope рисунок 240 изготовлен из металлической проволоки диаметром около 1,5 мм diameter. It состоит из части азбуки. Азбука почти в форме полукруга, и она выпуклая вертикально вниз. Ножка обеспечивает размещение устройства на горизонтальной поверхности. В L и C провод изогнут вот так. 2.
Образуются два подшипника, на которых расположен конец оси гиротопа. Центральная поверхность Ротора проходит через DE. Центр тяжести в верхней части находится на оси в плоскости, которая проходит через DE перпендикулярно оси переменного тока. Если вершина не вращается, то равновесие неустойчиво. Прибор трясется вокруг DE. Но если вершина вращается вокруг оси с большой угловой скоростью около 1 50 оборотов в секунду, то при вертикальной плоскости DBE система, по видимому, находится в устойчивом равновесии.
Отсюда и название подставки для Весов, которое было дано этой игрушке inventor. In фактически, инструмент вибрирует вокруг видимого положения равновесия, обнаруженного звуком. Последнее ничтожно мало, так как масса в верхней части больше, чем в ободах и legs. In в свою очередь, каркас и ножки, масса которых равна нулю, играют лишь роль установления между верхней и осью геометрической связи, которая представлена следующим образом: C показывает расстояние от центроида G вершины до горизонтальной плоскости, а I показывает длину перпендикуляра от этой точки G до DE. Когда устройство вращается вокруг DE, верхняя ось образует угол 0 С С= I sin 0 вертикально вверх.
Эта зависимость обусловлена проблемой перемещения монеты вдоль горизонтальной плоскости движения в данном случае I Происходить 6 = sin предыдущей общей формулы, если положить 0. В некоторых случаях, когда ось динамика изначально горизонтальна и неподвижна, первая Значение становится равным 0, а начальные значения 6 и p равны нулю. Общее уравнение показывает, что 6 остается равным y 3 = 0 = 0 и еще Подобные исследования можно найти в статье по Карвальо Карвальо, бюллетень де ла Сочи, т. е.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
