
Оглавление:

Вариационный метод (метод Бубнова-Галеркина)
- Рассмотрим нелинейное вынужденное колебание материальной системы с 1 степенью свободы, описываемое производной. Уравнение Лагранжа d dT dt Где T-кинетическая энергия материальной системы, q-обобщенная координата, Q-обобщенная сила с периодом 2 P. Применение интегрального принципа Гамильтона-Остроградского, вляется одним из наиболее распространенных методов аппроксимации для нахождения периодического решения конкретного дифференциального уравнения. 1 интегральный принцип должен быть использован в виде 2р Р 3. В качестве упражнения по сравнению с периодическим движением объекта обычно выбирают циклическое движение того же периода 2 p.
Итак, если сила сопротивления не существует, согласно закону, а сила возмущения изменяется, то искомое приближенное решение получается в следующем виде a1slnp 4-assln 3 ПТ — — грех 5пт 4 с параметрами АЛТ А3, А6,…Это зависит от последующих решений. Замените значение этого q его изменением 6q 6а греха пт 6a3 грех 3 ПТ 5пт 6a6 грех-Джей.. В Формуле 3 Г 2р Р Ф, 4-2Н п Дакс Дж Osinp СТТ-Джей-Ка, Джей 4 sin3p д МВТ 6ae Дж Dsin5p … 0 Где буква Ф обозначает результат присвоения Q 4 выражению д ДТ dt dj а Рассмотрим независимость вариаций Предмет уравнения, 2р Р 1 2р Р JФsinptdt O, J Osin3 rf 0 Б, т. ті WР Фsin5ptdt 0,… После решения этой системы уравнений, ab…
Если вместо диска к проволоке подвешено твердое тело, момент инерции которого неизвестен, то этот момент инерции можно экспериментально определять методом крутильных колебаний. Людмила Фирмаль
Определяется как следовательно, приближенный закон движения вопрос топор греха п, как грех 3 РТ А6 sin5pf … В первом приближении находим решение в виде alslnpf и последовательно добавляем члены ряда 4 во 2-й, 3-й и последующие approximations. As решение уточняется, то есть при переходе со 2-го на 3-е, из первого приближения Таким образом, сумма расчета увеличивается dramatically. At при этом, как правило, первое приближение дает достаточно точный результат. Поэтому при решении нелинейных задач вариационный метод часто ограничивается первым приближением.
Отметим, что использование метода Бубнова-Галеркина не имеет ничего общего с малой нелинейностью системы например, малостью параметра Р. Это обстоятельство существенно расширяет сферу его применения. Бубнов -.Вариационный метод г-а-леркина рекомендуется для решения задачи о вынужденных колебаниях нелинейных систем в следующем порядке 1 Создайте дифференциальное уравнение вынужденной вибрации и перенесите все ненулевые члены в левую часть. В некоторых случаях это будет mH-Y, F 0, Tr p — 0 и т.
Уравнение искомого периодического решения 9 0 оно должно иметь окружное волновое число Р, равное окружному волновому числу возмущающей силы возмущающего момента. Это уравнение содержит неизвестные параметры. 3 вычислить дисперсию 6 Q-q t искомого решения. Это изменение выражено в зависимости от изменения неизвестного параметра.
Подставим искомое решение q уравнения и его вариацию 6q Левая его часть представлена в виде суммы произведений независимых флуктуаций параметров на несколько коэффициентов. 5 Составьте систему уравнений чисел, где все коэффициенты, упомянутые в предыдущем пункте, равны нулю и равны числу изменений параметров. 6 решить эту систему алгебраически путем вычисления интеграла от составленной системы уравнений и определить неизвестные параметры. 7 присвоить результирующему значению параметра q q f см. Раздел 2, чтобы найти искомое приближенное решение этого дифференциального уравнения.
Задание 20.10. Познакомившись с решением задачи 20.7 методом пошагового интегрирования, мы решаем ее в годы вариационной модели Бубнова-Галеркина. Найти уравнение крутильных колебаний вала в первом приближении. Решение. Крутильная вибрация возникает под действием возмущающего момента Af0 sinohm. при решении задачи с помощью пошагового интегрирования, именуемого точным методом, было высказано предположение, что длительность отклонения от нулевого положения до экстремального значения, М, не равна длительности. m возвращается к нулю из положения экстремума.
Если решить задачу с первым приближением вариационным методом, то будем считать, что время отклонения равно времени возврата, а следовательно, равно 4 1 периода колебаний, то есть m T 4 l 2sh. Также в качестве начального приближения будем считать, что колебания происходят по гармоническим законам с окружной частотой, равной окружной частоте возмущающего момента и фазовому запаздыванию искомого закона движения от возмущающего момента LG0 sin coi. м pxsinco — Р, 1 Где qx-угловая ширина колебаний вала, где 0-момент времени, соответствующий безнапряженному состоянию вала, то есть 0.Параметры px и p подлежат последующим решениям.
Вращение вала против часовой стрелки из нулевого положения в крайнее соответствует ветви cx характеристики треугольник см. рис. 20.7. оно происходит на временном интервале 0 fsS — — 0 и описывается дифференциальным уравнением — С П 4040 грех Иначе говоря Afcp-sin 0, 2 Расположение в Ки е Возврат от крайнего положения к нулю происходит в соответствии с ветвлением характеристики треугольник. Ему соответствует дифференциальное уравнение ХF -с п М0 на грех ф Л2ф-zn0 sin 0, 3 Где это показано Это перемещение происходит в течение периода 0 t См. сноску 397 на стр. 2.
Затем происходит вращение по часовой стрелке от нулевого положения к экстремуму вдоль ветви CX потока — — 0е — — 0.Это соответствует дифференциальному уравнению 2. Наконец, возврат из положения экстремума к нулю происходит вдоль ветви ct между и Уравнение Потенциала 3. Примените вариационный метод для вычисления вариации функции 1 ИК 6г грех ж я-0 — 60 г со, потому что ш т-0.
Уравнение 3 в скобках Q. В этой задаче в соответствующем временном интервале, равном левой части выражений 2 и 3, A,,. A112 вводит значение p из Формулы 1. А1,а а 2 -moslnt0 Р1 b1 2 — Сино −0 — mosinteft б Кроме того, в этой задаче уравнения, приведенные в теоретическом обзоре 3, появляются в tx , ti и p, где 6y 6 p см. Формулу 4, 4 0, p-W. Таким образом, уравнение 3 принимает вид 5 -в AjOqxft-l-J Aj6q di J AhbfL JA 6 pL 0. 6 ЯГ п т п п В связи с симметрией движения относительно полупериода нечетные и четные члены этого уравнения являются соответственно equal. So … P P v P А1В ЛП Дж As6 ptft 0,р р Где Aj и A приведены в Формуле 5.
Введите формулу вариации 6 в уравнение 4 и соберите члены, содержащие 6 p и 60 6 — С — 1 AiSinw −0 Aasin o −0 I I I- S — P J в р 1 ДТ Aicoscopy −0 м Дж Aacosco Т-0 МКГ Р ДЖ 0. 7 Вариации 6Ф А 60-это независимость. Поэтому коэффициенты обеих этих вариаций 7 должны быть равны нулю. АР грех грехом Т-0 ДТ 0, 8 J Xicos 0 f-P J Laco8sh −0 0. 9 Во мне. Я 2Ш П Если использовать формулы 8 и 9 с формулой 5 и вычислить Интеграл с формулами 8 и 9 Ф1 а — П2 та потому что 00, 10 Фх а — а, n flosin o0 Где A2 A A. после решения уравнений 10 и 11 на Phi и tan sor nt0 фдж — 12 Ввод этих значений в 1 дает искомое уравнение крутильной вибрации.
- Если нет момента сопротивления, то можно видеть, что если характеристика треугольника вырождается в линейную характеристику коэффициента жесткости c. То есть AJ AJ, то формула 14 приобретает обычный вид соответствующей линейной задачи AJ. Используя формулы 12 и 13, можно построить кривую как функцию изменения амплитуды и углового замедления о0 для различных значений углового момента сопротивления, определяемого параметром Q AJ AJ с.
в этом случае мы находим сходство с аналогичными кривыми, построенными для скорости и сопротивления, которое пропорционально линейной упругой силе, но так как амплитуда максимальных колебаний возрастает с увеличением момента силы сопротивления, то можно сказать, что амплитуда q-волны выше. Направление увеличения a k называется резонансом b A 1. Так что для q 2 это и 1.02, а для 3 а а 1,05. Напомним, что при лобовом сопротивлении, пропорциональном скорости и линейной упругой силе, максимальная амплитуда вынужденных колебаний смещается в сторону уменьшения ta k, то есть происходит при 0 A 1.
Угловая амплитуда колебаний а, определенная из системы уравнений (8), равна Опа зависит от начальных условий движения и круговой частоты колебаний. Людмила Фирмаль
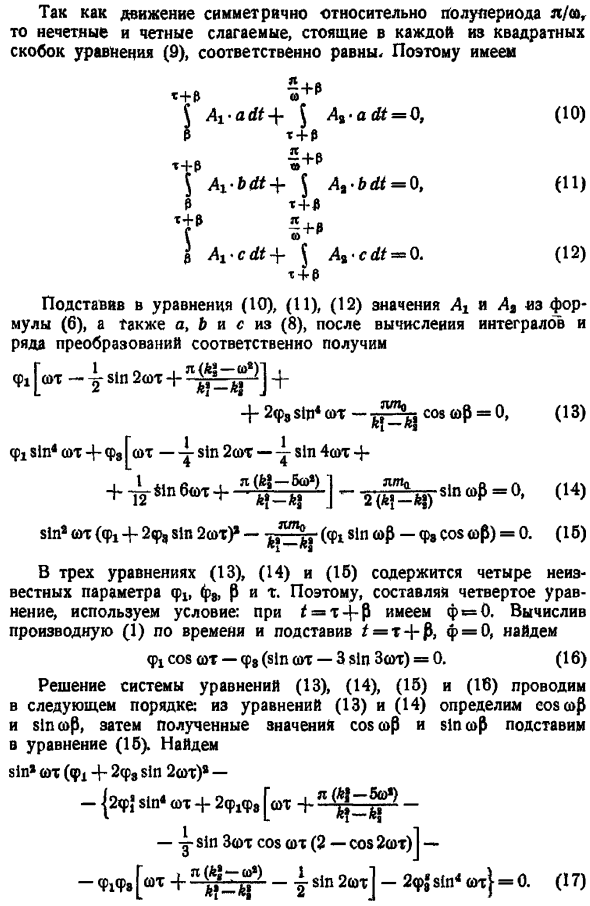
Задание 20.11. Ознакомившись с условиями и решениями предыдущих задач, выполните 2-е приближение вариационным методом Бубнова-Галеркина. Решение. При рассмотрении первого приближения к предыдущей задаче предполагалось, что длительность отклонения колебательной системы от нулевого положения до экстремального значения равна длительности возврата в это положение, то есть 4 минуты периода колебаний, 1 4 2 2a. In практика показывает, что продолжительность отклонения меньше, чем продолжительность возврата. Это должно учитывать характеристики этой вариации во 2-м приближении. Искомая функция должна удовлетворять следующим условиям 1 H 0 2 для P 0 3 — П m , 0.
Функция 15 Пю -р ф8 СО8й -Р -cos3 у — р, 1, все эти условия были выполнены, что легко видеть. Где 1, 3 и p-это 3 константы, которые все еще являются неизвестными параметрами. Если сравнить функцию 1 с первым приближенным значением 151пш — р см. предыдущую формулу задачи 1, то функция 1 имеет член с050 — р — — c0s3 0 IP. Возьмем функцию 2 2-го приближения при решении дифференциальных уравнений 3 и 1 предыдущей задачи. Кроме того, k ctUt является ф А,, ф — Осин Ат 0 2 Р М П И П М П 3 В m p p и 4-m p P. 4 См. сноску 397 на стр. 2. Используя вариационный метод Бубнова-Галеркина 3, в этом вопросе мы пишем Ф А, Ф-т0 грех у БФ ДТ 0.
Формула 10 11 12 присвоим AR и Da значения уравнений 6 и 8 a, b и c соответственно после вычисления интеграла и ряда преобразований 1 a-sin в 2-х частях 2-факторную авторизацию sin4-со 0 13 jpi по sin4 люлька з ПК-для 2sot-за грех грех 4шт От 14 грех ПК qij 2 грех 2шт — ИСЛ ИСЛ Р-СПВ, потому что о 0. 16 3 уравнения 13, 14 и 16 содержат 4 неизвестных параметра х, 8, Rh. Поэтому для построения 4-го выражения используйте следующее условие если m P, то 0.Если вычислить производную 1 по времени и подставить m P, а 0 ф1СО8ШТ-ф8 Sin sot-3 slnзшт 0.
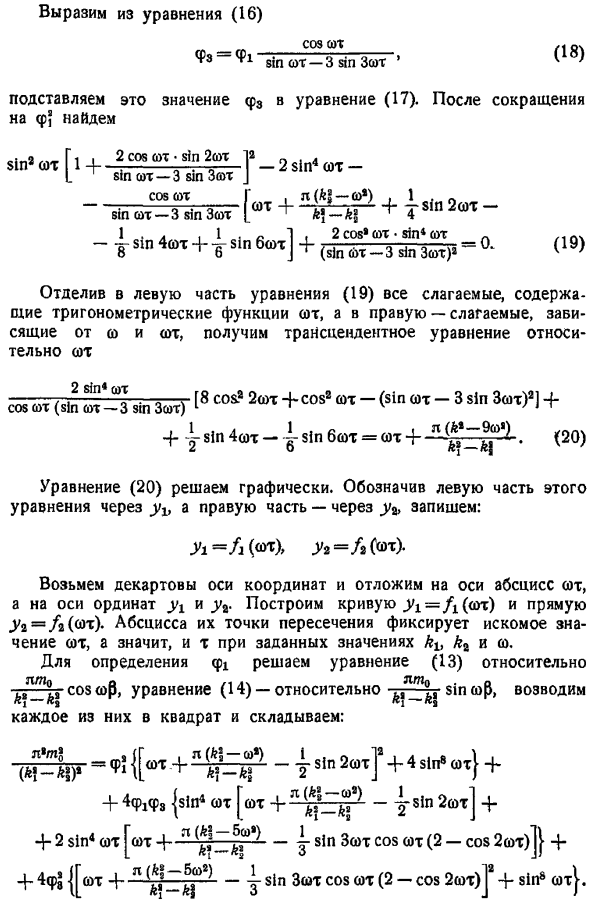
Система уравнений 13 14 16 причем решения 16 выполняются в следующем порядке из уравнений 13 и 14 определяют эоскоп и sin cp, подставляя полученные значения coscopeand sin cp в уравнение 15. — — 2Ф sin4 шт 2fzf8 шт я- — ПК sinЗштcos 2-cos2шт — — ф1ф pcs — at sln 2pcs −2 p sln 1 17 Выражение из Формулы 16 Фз Фг 18 Sin sot — 3 греха Присвойте это значение p3 формуле 17.
После сокращения ЗП G1 от грехов 1 — 2 L sin pc-3 от sin 3 J — грех, ПК-3 sinЗшт шт дж — дж з п 2 с- sin 4шт sin 6шт Х-з Зшт 19 Если разделить все члены, включая тригонометрические функции ПК, на левую часть уравнения 19, а на правую часть-члены, зависящие от w и ПК, то получим трансцендентальные уравнения ПК ПК потому что грех шт-3 грех Zpcs И8 так 2ol потому что от — Син ПК-3 sinЗшт грех дело-я-грех 4шт 6шт ПК. 20 Формула 20 решается графически.
Если вы представляете левую часть этого уравнения с yb и правую сторону с y , вы получаете А а а, я а ПК. Возьмите Декартовы координатные оси, поместите части вдоль оси абсцисс и поместите YT и yt на продольную ось. Создайте кривую yi fi r0 и прямую y2 A r .Абсцисса их пересечения фиксирует искомое значение ПК. чтобы определить C i, мы решаем уравнение 13 для cosmP. Уравнение 14 — относительно sin 00 сложите каждый из них на 2 квадрата.
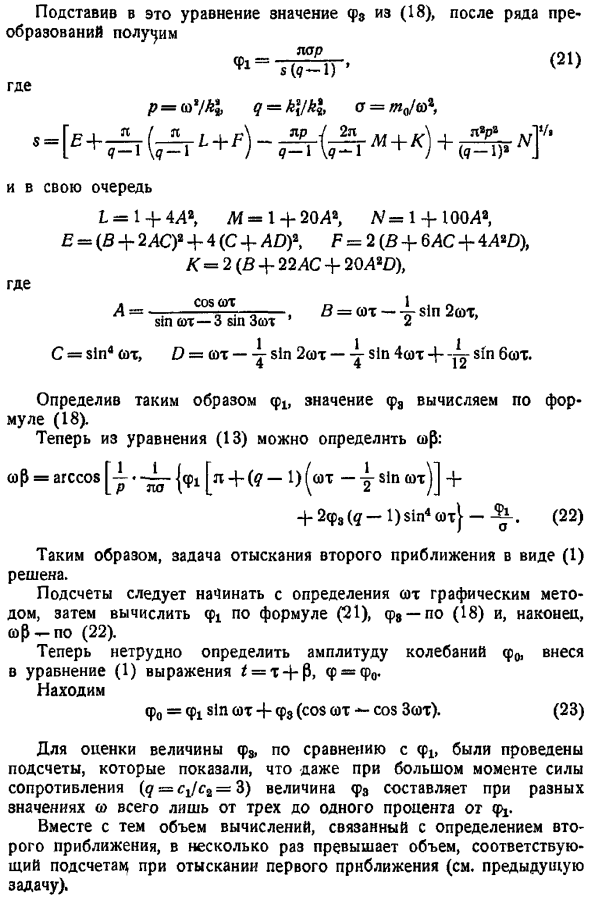
Замените формацию на эту половину И по порядку Куда L l 44, M 1 204, N 1 1004 E B 2 ACS 4 C 4D , F 2 B 64C 440, C 2 B 224C 2040 Б Уте-СЛН 2yut C sin4 от. О ют-грех 2yut—Дж грех 4yut в — J СЛН БЮТ. При таком определении px значение p9 вычисляется в формате le 18. Теперь мы можем определить 0 по формуле 13. ц0 agsso8 г.-Х, н 0 1 ПК-Джей-sinojT J в 2 e-l sin4 0T — 22 Таким образом, решается задача нахождения 2-го приближения в виде 1.
Расчет следует начинать с определения графическим методом, а затем вычислять по pt, 8- 18, — 22 по формуле 18. Введя в уравнение 1 формулу m 0, 0, нетрудно определить амплитуду колебаний 0. Выяснить ФО f181foot ф8 созывать-sozut. 23 чтобы оценить значение По сравнению с г, был сделан расчет, показывающий, что для различных значений r значение составляет всего от 3 до 1 процента fr, даже если это большой момент сопротивления c1 c8 3 При этом сумма расчета, связанная с определением 2-го приближения, будет в несколько раз больше суммы, соответствующей расчету при нахождении первого приближения см. предыдущий вопрос.
Поэтому при определении амплитуды колебаний p0 нецелесообразно проводить утомительные вычисления для определения 2-го приближения, которые следует ограничить вычислением 1-го приближения. Расчеты, выполненные для сравнения точного решения, полученного ступенчатым интегральным методом см. задачу 20.7, и 1-го и 2-го приближений, найденных вариационным методом Бубнова-Галеркина, показали следующее C1 s 3 угол поворота, полученный точным решением p f t , изменяется в пределах 5 градусов с соответствующим результатом, найденным в первом приближении. Результат, вычисленный во 2-м приближении, находится между точным решением и соответствующим значением, найденным в первом приближении.
Поэтому сравнение этих расчетов показывает возможность использования первого приближения. Напомним, что в случае точного решения и 2-го приближения трансцендентальное уравнение ячейки должно быть решено графически, и решение будет очень сложным. Конечно, если вам нужно определить угол максимального отклонения, вы должны использовать точное решение см. задачу 20.7 или 2-е approximation.
Смотрите также:
Предмет теоретическая механика
| Метод последовательных приближений | Свободные нелинейные колебания |
| Метод медленно меняющихся амплитуд (метод Ван-дер-Поля) | Вынужденные нелинейные колебания |
