
Оглавление:


Закон сохранения механической энергии
- Закон сохранения механических энергетических точек. Для материальных точек теорема об изменении кинетической энергии может быть выражена как: mv2l2 — mvo! 2 = А Когда масса движется в стационарном поле потенциальной силы, A = P0-P. так mt> 2 / 2— / I1> o / 2 = RN-R или »и> 2/2 + R = cn> o / 2 + R0 = r (h — постоянная). E = mv2 / 2 + n = h получается, когда E представляет полную механическую энергию точки, которая состоит из кинетической энергии и потенциальной энергии.
Таким образом, когда точка движется в стационарном поле потенциальной силы, ее полная механическая энергия остается постоянной. Это закон сохранения точечной кинетической энергии и является первым интегралом дифференциального уравнения движения точки. Закон сохранения механической энергии системы Теорема об изменении кинетической энергии для системы может быть выражена следующим образом: 7’-G0-XM1, | + L1 «).
В этой формулировке, конечно, предполагается, что минимальное значение функции N равно нулю, как мы рассмотрели выше. Давайте теперь возьмем две точки На rucn и разложим их на расстояние g, сохраняя их неподвижными. Людмила Фирмаль
Интерфейс (90) Если система движется через стационарное потенциальное силовое поле, £ L * »H0- / 7, Где P — потенциальная энергия внутренних и внешних сил, действующих на систему. так Г — Г0 = Я0—77 или Т + П = Т0 + n0 = h, Где h постоянная Если полная механическая энергия системы представлена E, £ = Т + Н = г. (91) Уравнение (91) представляет закон сохранения механической энергии в системе. Общая механическая энергия, когда система движется в статическом потенциальном поле внешних и внутренних сил, является постоянной.
Для абсолютно твердого тела работа всех внутренних сил равна нулю, поэтому потенциальная энергия внутренней силы является постоянной величиной, которую можно считать равной нулю. Тогда в (91) в качестве потенциальной энергии должна приниматься только потенциальная энергия внешней силы, которая является постоянной величиной наряду с кинетической энергией. Когда движется переменная механическая система, сумма кинетической энергии системы и потенциальной энергии внешней силы не постоянна. Она становится постоянной Ной только с потенциальной энергией внутренней силы.
Механическая система, которая удовлетворяет законам сохранения механической энергии, называется консервативной. Когда точка или система движется в реальном непотенциальном силовом поле, если потенциал связан с действием резистивной силы, механическая энергия изменяется и всегда уменьшается под действием резистивной силы. Часть механической энергии, теряемой системой, обычно является тепловой энергией. Общая энергия всех типов (механическая, термическая, химическая и т. Д.) Не изменяется по мере движения точки или системы в силовом поле.
В этом случае выполняется только преобразование энергии одного типа в другой. Рассмотрим основные типы сложных примеров. Твердое движение Рисунок 78 Тело: перемещение, вращение вокруг неподвижной оси и движение плоскости, а также расчет импульса системы, момента движения и кинетической энергии. Пример. Гравитационная нагрузка A / *, = 150 Н снижается, с помощью нити, которая не проходит без силы тяжести, перемещают равномерный диск D под действием силы тяжести / ‘= 900 Н (рис. 78). Нить оборачивается вокруг диска D и проходит через блок. Гравитация Р2 = 140 Н. Блок резьба поведение Скольжение.
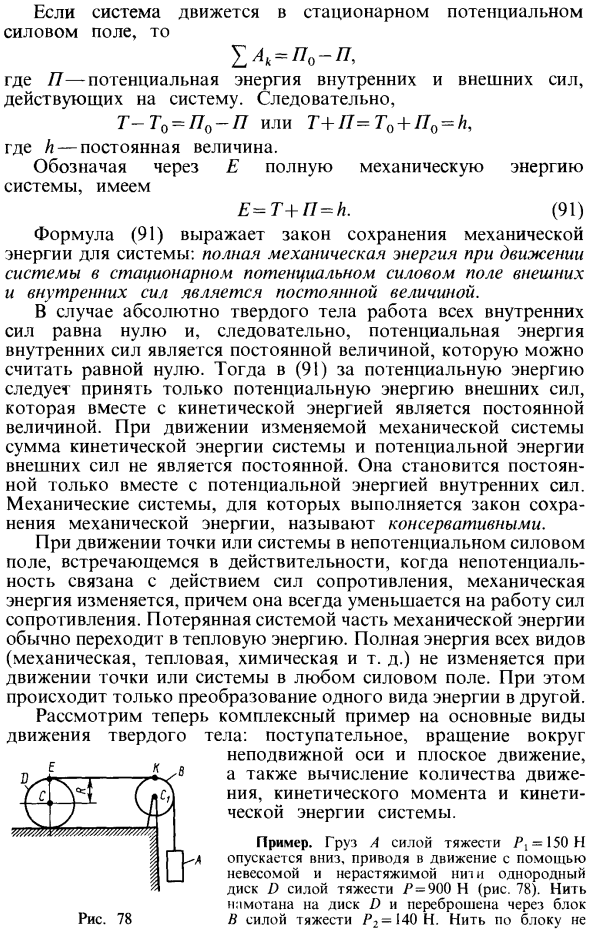
Радиус диска D составляет R = 30 см и движется по горизонтальной направляющей. Коэффициент трения скольжения между диском и рельсом / = 0,4; Коэффициент трения качения 8 = 0,15 Пренебрегающие блоки следует рассматривать как однородные диски с незначительным радиусом трения на оси блока. Система начинает двигаться из стационарного состояния. Определить уравнение движения блока В нажимного диска по оси. Импульс и кинетическая энергия системы, а также момент движения ролика D относительно точки контакта между роликом D и рельсом составляют 1 секунду после начала движения.
Решения. Настройте уравнения движения для отдельных сил, приложенных к ним. Каток I) выполняет плоское движение. На внешнюю гравитацию R прикладывают натяжение нити S и нормальную реакцию N силы трения реакции рельса I ‘и пару сил, которые препятствуют качению в момент L (рис. 79). Предполагается, что сила трения направлена в положительном направлении оси Ox. При создании уравнения момент силы и угловые характеристики объекта считаются положительными, если они против часовой стрелки. Ссылка D имеет следующее уравнение движения: (А) LeF = E MSg (Flrt) = FR-SR + L J Где JCs — это момент инерции ролика относительно оси Cz, который проходит через центр масс, перпендикулярный плоскости диска.
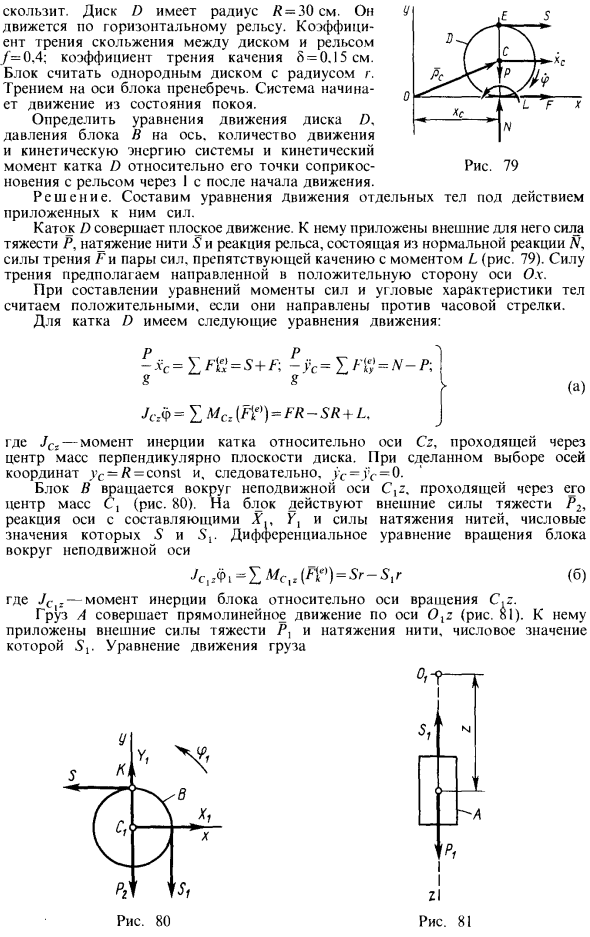
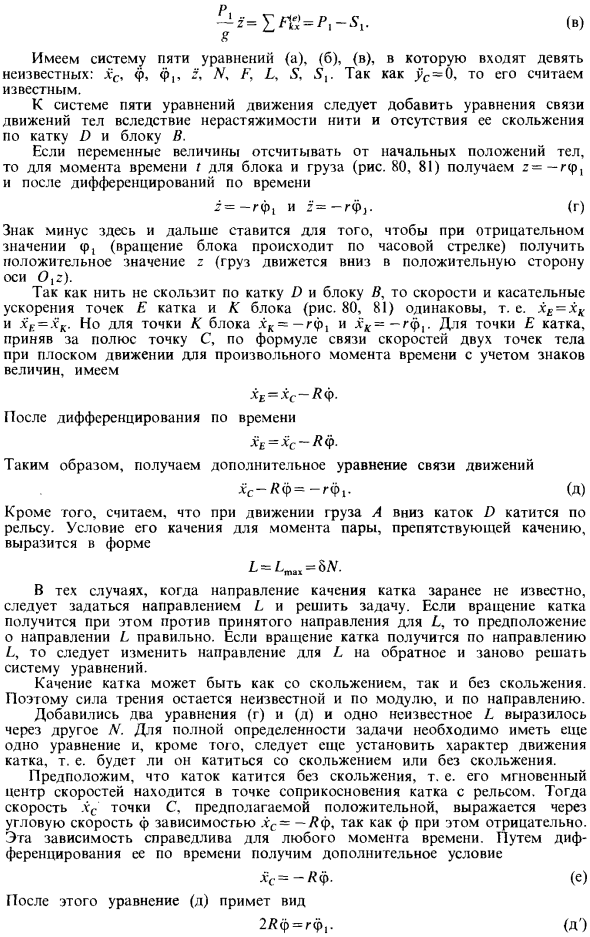
- Если вы выбираете ось, yc = R = const, поэтому / c = / c = 0. Блок В вращается вокруг фиксированной оси Ctz. Он проходит через центр тяжести С (рис. 80). На блок влияют внешняя сила тяжести P2, реакция оси и компонента X, а также натяжение нити (номера S и S). Дифференциальное уравнение для вращения блока вокруг неподвижной оси — / c.rVi = S Wc, α (fl’l) = -S’— ■ Si’- Где / s — момент инерции блока относительно оси вращения C.z. Груз A движется линейно вдоль оси O.z (рис. 81).
Внешняя сила тяжести / * и числовое натяжение нити, которое является уравнением движения груза, применяются к нему. (6) Рис. 80 вот здорово Рис. 81 (В) Введите 9 о том, что он верит Есть xc, f, известная неизвестная система. Поскольку система пяти уравнений движения не имеет растяжимости нити и скольжения вдоль ролика D и блока B, необходимо добавить уравнение связи между движениями тела. Если переменная отсчитывается от начальной позиции тела, то z = —her получается для единицы измерения и времени загрузки t (рис. 80, 81) после дифференциации по времени.
В конце концов, вы можете представить себе точку под действием заданной силы и описать прямую линию. Людмила Фирмаль
В дальнейшем отрицательный знак помещается для получения положительного значения z (если значение Pty предположение об отсутствии скольжения неверно, поскольку требуется сила трения, которая не возникает. В этом случае ролик скользит и катится, и условие (е) не выполняется. Однако при качении во время скольжения | F | = P „, I = / N, то есть вместо отбрасываемого уравнения (e) существует дополнительное уравнение для одного неизвестного. Точно так же проблема может быть решена: силу трения P нужно подставить в формулу вместо F.
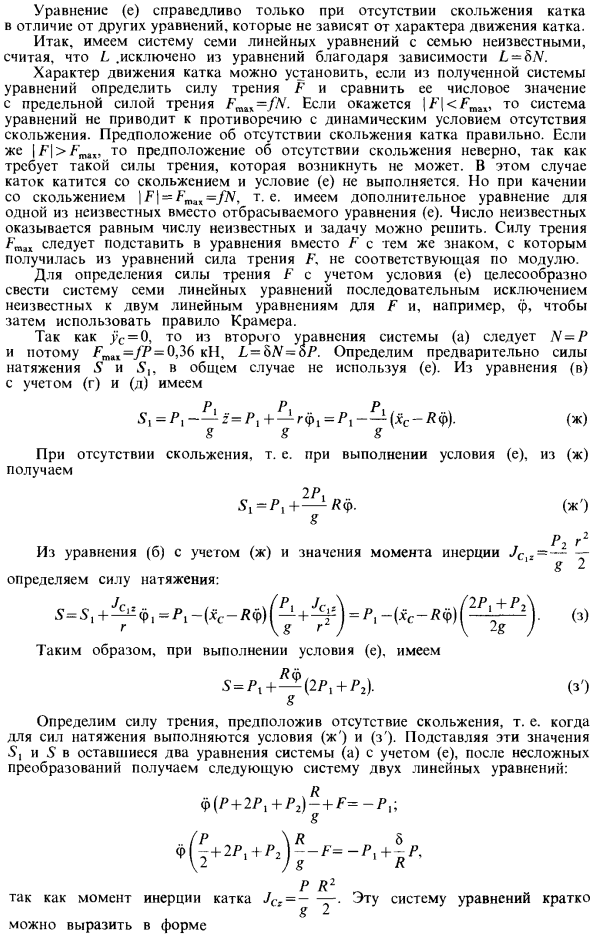
Она имеет тот же знак, что и сила трения F, полученная из формулы, и не соответствует модулю. Чтобы определить силу трения F с учетом условия (e), уменьшите систему из 7 линейных уравнений, последовательно удаляя неизвестные до F и 2 линейных уравнений (например, φ), и используйте правила Крамера Рекомендуется, чтобы вы Поскольку yn = 0, N = P из второго уравнения системы (a), Fa „= fP = 0,36 кН, L = $ N = 6P. Сначала определим напряжения 5 и $ ( В общем случае не используйте (e) из уравнения (c), учитывая (d) и (e) 5, = P, —z = P, + -ψ ^ P, — (xc-Яф).
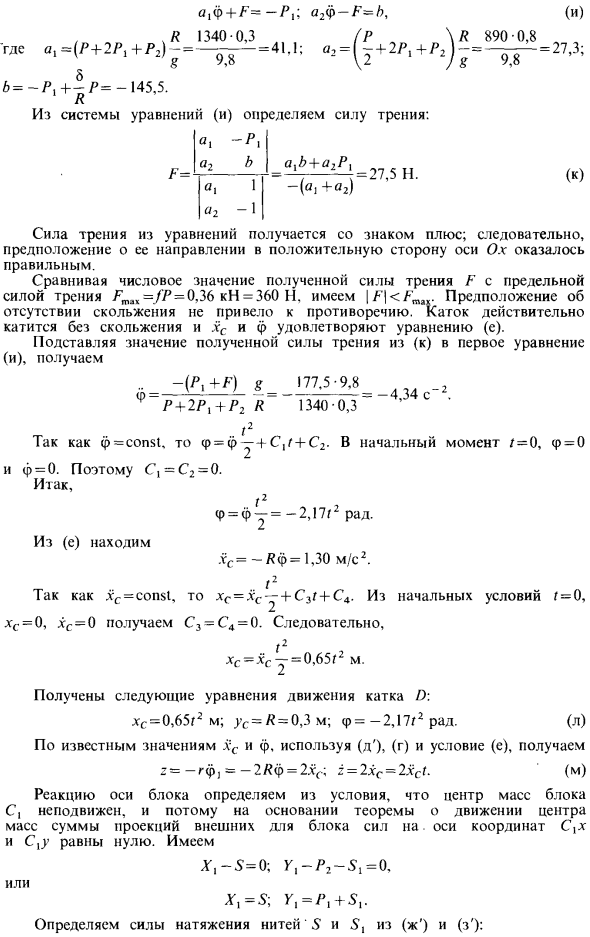
Если нет проскальзывания, то есть, если выполняется условие (e), из (g) (G) (W ‘) 2 Определить напряжение. Из уравнения (б) учитываются (г) и значения момента инерции Следовательно, при условии (е). У нас есть яф S = Pt + — (2P, + P2). (H ‘) Предположим, что скольжения нет, то есть определите силу трения, когда натяжение (g ‘) и (h’) выполнено. Подставляя эти значения S и $ в оставшиеся два уравнения (a) системы с учетом (e) и после простого преобразования, получаем систему из следующих двух линейных уравнений. Φ (P + 2P, + Pr) — + = = -P; Это может быть выражено в следующем формате -. Эта система уравнений проста Где ^ ^ (P + rP ^ Pr} l, V + F = -f — />, + — /> = -145,5.
Определить из одновременных уравнений (а) Сила трения может быть получена из уравнения. В результате было обнаружено, что предположение о направлении в положительном направлении оси Ox было правильным. Сравнение полученного числового значения силы трения F с предельной силой трения Fm „= / P = 0.36 кН = 360 Н дает | F | <£ e„. Предположение об отсутствии промахов не было несостоятельным. Связь катится без проскальзывания, а xc и φ удовлетворяют уравнению (e) Подставляя значение силы трения, полученной из (k), в первое уравнение (я), -4,34 • Поскольку φ = соя1. После этого p = 150-1,3-1,35-2,2 «192 Нм, z = xct2 = 1,3; <p = -2,2; L = 87 = 0,0015-900 = 1,35 Н Если ролик катится без скольжения, путь точки контакта между роликом D и рельсом x, + L <p = 0.
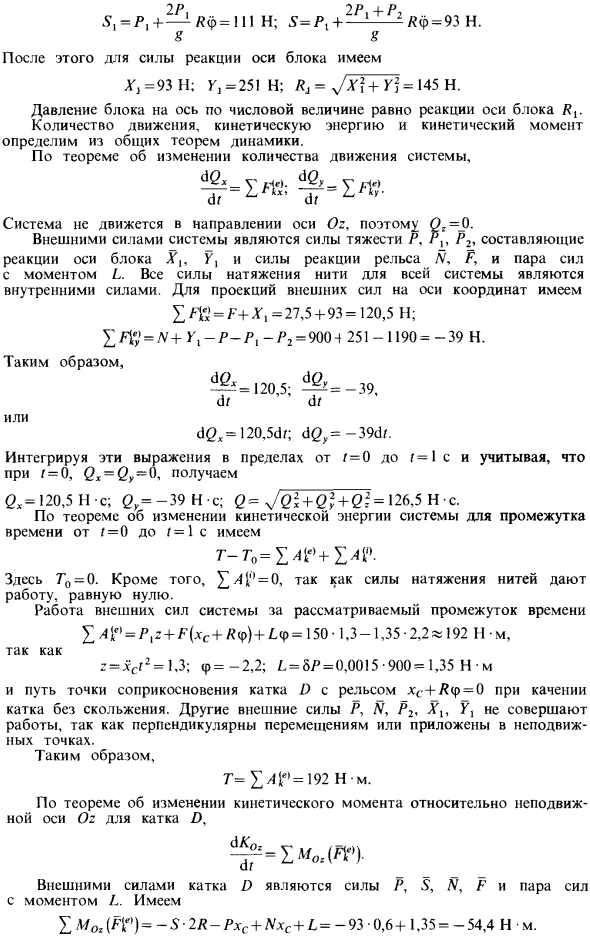
Другие внешние силы P, N, P2, Xt, Y не работают, потому что они перпендикулярны смещению или приложены в фиксированной точке. Вот так 7 = £ lP = 192Нм. Относительный момент По теореме -Pxc + Nxc = O dKOl = -54,4др. Интегрируя это соотношение с первого момента до момента, соответствующего 1 = 1 с, ХО1 = -54,4 Нм. Проверьте полученные значения импульса, кинетической энергии и кинетического момента и рассчитайте по формуле. Импульс системы Q состоит из векторной суммы импульса отдельных объектов. Q-Qa + Qb + Qd- Поскольку центр тяжести блока B неподвижен, (5c = 0. Для ролика D-PP QD = -Vc, Qd, = to * c, Qd, = 0- г г Положительная сторона оси Otz (внизу), результаты. (А).
Координаты, и ах Зуя (м) вверх по горизонтали, мы получаем Проекция (а) Юра Во и Ою Q = 900 ■ 1,3 / 9,8 = 119; Qt = -150 • 2,6 / 9,8 = –40; ´ + Ё, 2 * 127H-s. Т состоит из индивидуальной кинетической энергии Кинетическая энергия Kunechichisuku; формула 117 + 24 + 52®193 Нм. £ 0 = rsxLL5s + KP, / ^ ТВ + ТВ + Т ^. Дженни. Ему Блок вращается вокруг фиксированной оси. Следовательно, г = Поскольку груз движется вперед, Спроецируйте Ro на ось Oz.
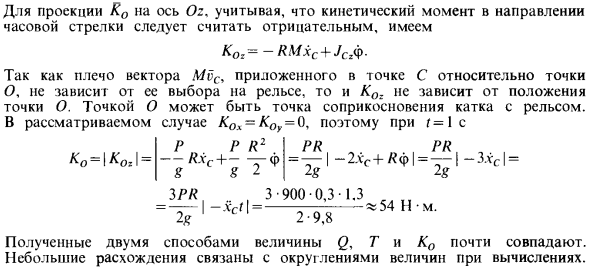
Учитывая, что момент движения по часовой стрелке следует считать отрицательным, направление То же самое относится к Ко, потому что плечо вектора Mvc применяется в точке C и, следовательно, зависит от выбора на рельсе. Это не зависит от положения точки О. Точка O является точкой контакта между роликом и рельсом. В рассматриваемом случае KOl = KOg = 0, поэтому / = 1 с «Φ1 = m до 1-3xc | = Получается двумя способами Значения Q, T и Co практически соответствуют округлению расчетных значений. Связанные небольшие различия.
Смотрите также:
Задачи по теоретической механике
| Силовая функция силы притяжения по закону Ньютона | Принцип Даламбера |
| Силовая функция и потенциальная энергия системы | Принцип Даламбера для материальной точки |
