
Оглавление:

Звенья и кинематические пары механизмов
- Кинематическая пара звено и механизм Чтобы продвигать человеческий труд и повышать производительность, мы используем устройства для обработки и преобразования материалов, энергии и информации, используя определенные соответствующие механические движения. Техническая машина изменяет размер, форму и условия (твердое, жидкое и т. Д.) Объекта, подлежащего обработке.
Машина выполняет свои функции с помощью определенных механических движений, а ее носитель является механизмом. Механизм представляет собой искусственно созданное подвижно соединенное тело (звено), предназначенное для преобразования заданного движения одной или нескольких сил в требуемое движение или силу другого тела. это система.
В транспортном машиностроении различные объекты движутся со скоростью, необходимой для энергетических и информационных машин, соответственно, и энергия или входная информация преобразуются для управления, координации и управления движением. Людмила Фирмаль
Машина состоит из комбинации механизмов. Твердые тела, которые участвуют в определенном преобразовании движения, называются связями. Ссылка — это одна или несколько частей, соединенных между собой неподвижно.В состав механизма входят как фиксированные звенья (стойки), так и мобильные звенья. Стойка содержит элементы системы крепления механизма, например, корпус и детали, которые надежно соединены со стойкой. Мобильные ссылки образуют надежную систему с одинаковым типом движения независимо от количества задействованных частей.
Этот механизм различает входное (ведущее) звено, которое получает движение от внешнего источника энергии, и ведомое звено (все другие подвижные звенья, которые получают определенное движение от ведущего звена). Обычно, основное звено закона движения дается. Движение приводного звена исследуется в связи с прочно закрепленной системой крепления кузова, то есть стойкой. Например, принтер требует, чтобы стойка печатающего устройства, все детали и платы были надежно подключены к стойке. Управляемая ссылка, которая использует механизм для создания необходимого движения, называется выходом (работником).
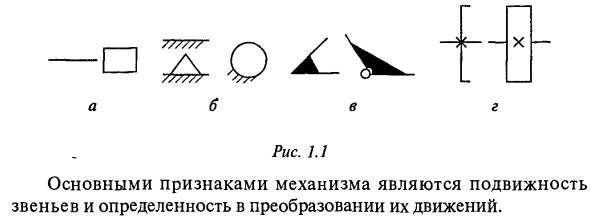
- Механизм звеньев имеет различные физические характеристики. Помимо полностью жесткого звена в механизме используются упругие и гибкие звенья, которые могут изменить их форму и размер. В качестве упругих звеньев используются различные типы пружин, мембран и резинометаллических соединений. Гибкие звенья включают в себя ремни, ленты, ремни, нерастяжимые нити и многое другое. Без учета многих конструктивных особенностей упрощенное описание делается при изучении поведения ссылочного механизма (ГОСТ 2.770). Поэтому на рисунке 1.1 показаны такие звенья, как валы, стержни и ползунки.
Чтобы показать, что ссылка не перемещается, часть ее контура покрыта штриховкой (рис. 1.1, б). На рисунке показано фиксированное соединение частей звена и фиксированное соединение вала и деталей. 1.1, c и d соответственно.П ЗД Рис 1.1 ■ 3 * — X но
Главной особенностью этого механизма является мобильность звена и уверенность в преобразовании его движения. Людмила Фирмаль
Подвижные ссылки связаны между собой или с фиксированными ссылками, поэтому вы можете перемещать одну ссылку относительно другой. Соединение двух звеньев (твердых тел), которое позволяет заданное относительное движение, называется кинематической парой. Парные звенья могут находиться в прямом контакте (сопряжении) друг с другом или образовывать подвижное соединение, используя тела, которые не участвуют в данном преобразовании движения, например, используя подшипники качения (кинематическое соединение).
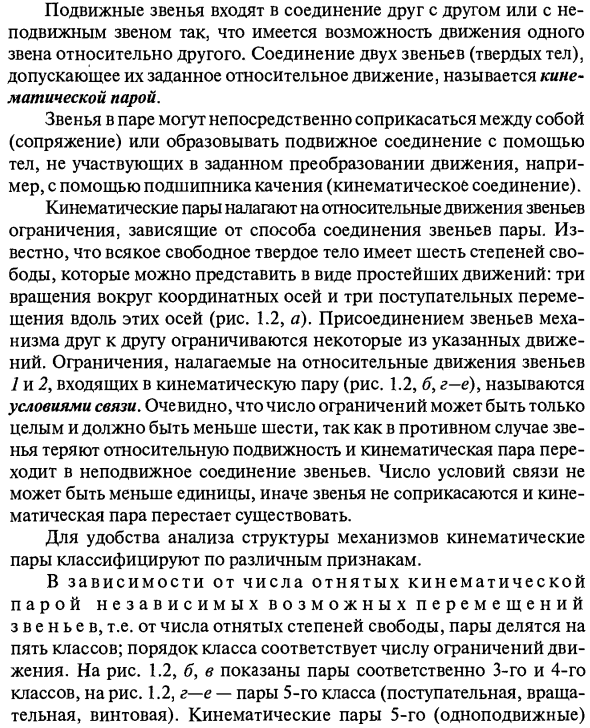
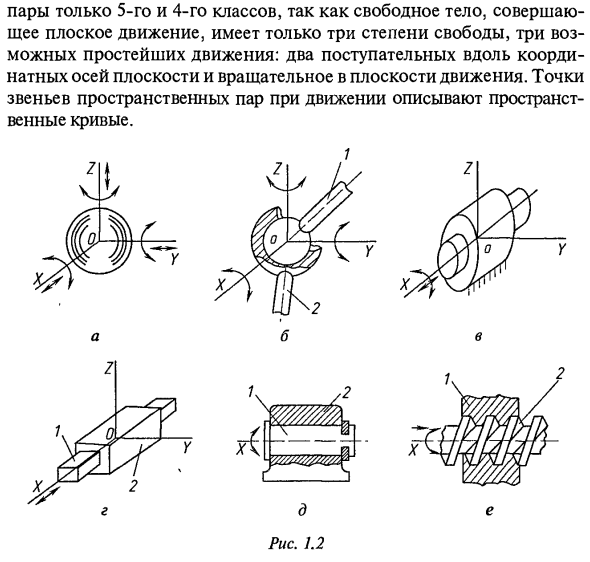
Кинематические пары накладывают ограничения на относительное перемещение ссылок в зависимости от того, как связаны парные ссылки. Все свободные тела имеют шесть степеней свободы и, как известно, представляются в виде простого движения трех поворотов вокруг координатных осей и трех поступательных движений вдоль этих осей (рис. 1.2). , а). Комбинация механизмов связи друг с другом ограничивает некоторые из этих движений. Ограничение, налагаемое на относительное перемещение блоков 7 и 2 в кинематической паре (рис. 1.2, б, г), называется условием связи. Очевидно, что предельное число является целым числом и должно быть меньше 6. В противном случае относительная мобильность связи будет потеряна, и кинематическая пара станет постоянным соединением.
Количество условий связи не может быть меньше 1. В противном случае ссылки не будут соприкасаться и четное число не будет существовать. Для облегчения анализа структуры механизма кинематические пары классифицируются по различным критериям. В зависимости от количества независимых возможных движений звена, лишенного четного числа, то есть вне степеней свободы, пара делится на пять классов. Порядок классов соответствует количеству ограничений движения.
На рисунках 1.2, b и c показаны пары третьего и четвертого классов на рисунке 3 соответственно. 1,2, г — е — пара пятого класса (перевод, вращение, винт). 5-я кинематическая пара (одиночного действия) Классы являются самыми популярными, потому что они являются основой для поступательных и вращательных направляющих. В зависимости от характера относительного движения звеньев кинематические пары можно разделить на квартиры и пространства. Точки связи в паре плоскостей можно перемещать в одной или параллельных плоскостях.
Включает плоские кинематические пары Поскольку свободное тело с плоским движением имеет только три степени свободы, только пары пятого и четвертого классов, три простейших возможных движения: два поступательных движения вдоль координатных осей плоскости и в плоскости движения Точка звена подвижной пространственной пары представляет собой пространственную кривую. Рисунок 1.2
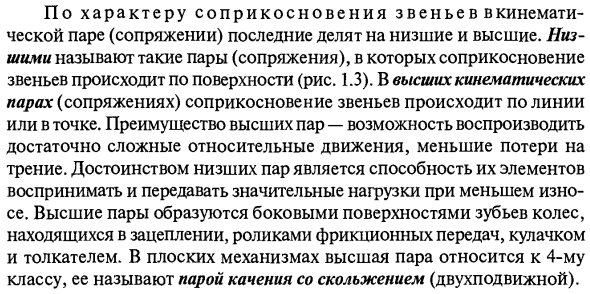
В зависимости от характера контакта кинематические пары (сопряженные) звенья делятся на нижние и верхние звенья. Самый нижний называется парой (сопряженной), где связь контактирует на поверхности (рисунок 1.3). В высших кинематических парах (конъюгатах) контактные контакты происходят вдоль линий или в точках. Преимущество более высокой пары состоит в том, что она может воспроизводить довольно сложное относительное движение и имеет меньшие потери на трение.
Преимущество низкой пары состоит в том, что они могут воспринимать и передавать большие нагрузки с меньшим износом. Верхняя пара образована сторонами зубчатого колеса, которые зацеплены с фрикционными роликами, кулачками и толкателями. В плоском механизме лучшая пара относится к 4-му классу и называется катящейся парой со скольжением (2 подвижных). Рис 1.3 Согласно заместителю и моему методу, т.е. для обеспечения постоянного контакта элементов, кинематические пары классифицируются геометрически открытыми (силовыми) и закрытыми. Первое состоит в том, что одно звено существует для проталкивания другого звена под действием силы тяжести, упругости пружины и электромагнитного притяжения, а во-вторых, геометрия элемента обеспечивает контакт звена. (См. Рис. 1.2, бф).
Смотрите также:
| Кручение стержней с круглым поперечным сечением | Кинематические цепи. Степень подвижности механизмов |
| Определение напряжений при кручении стержней с круглым поперечным сечением | Классификация механизмов |
