
Оглавление:

Кинематические цепи. Степень подвижности механизмов
- Кинематическая цепь. Степень мобильности механизма Как уже упоминалось, все звенья и кинематические пары упрощены на диаграмме при изучении движения механизма. На рисунке показано условное изображение наиболее часто используемых кинематических пар 5-го и 4-го классов. 1.3: a, b — подвижные 7, 2, неподвижная вращающаяся пара с 0 звеньями. wu g-прогрессивный; d-винт; электронное зубчатое колесо 4-го класса в точке зацепления А шестерен 1 и 2 Звенья связаны между собой кинематическими парами кинематических цепей.
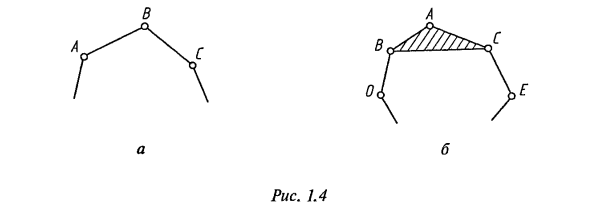
Плоская цепочка образована плоскими звеньями. Точка звена в пространственной цепочке представляет путь пространства. Кинематические цепи можно разделить на простые и сложные. В простой цепочке каждое звено содержится не более чем в двух кинематических парах (рис. 1.4, а). Различают открытые (открытые) цепи движения и закрытые цепи движения. Открытая кинематическая цепь имеет звенья, которые вписываются только в одну кинематическую пару (рис. 1.4, б). В замкнутом контуре все звенья включены как минимум в две кинематические пары.
В зависимости от характера движения звена, существует плоская и пространственная кинематика Сеть. Людмила Фирмаль
Механизм всегда можно представить в виде кинематической цепи с одним фиксированным звеном (стойкой). Однако не все цепочки движений являются механизмами. Наиболее важной характеристикой любого механизма является его мобильность, которая, как известно, оценивается по степени мобильности (степени свободы) механизма. Это равно числу независимых движений, которые необходимо установить на верхнем (первом) звене механизма, чтобы получить четко определенное движение всех других подвижных звеньев. Степень мобильности механизма メ カ ニ ズ ム должна быть не менее 1 и равна числу обобщенных координат механизма. Количество независимых кинематических параметров (смещение).
В плоских механизмах ведущее звено обычно выполняет одно простое движение, вращение или перемещение, поэтому при таком механизме степень мобильности равна числу ведущих звеньев. Может быть одна или несколько первичных ссылок. Когда ведущее звено вращается вокруг фиксированной оси, его положение определяется обобщенными координатами (угол поворота звена). Когда предыдущая ссылка выполняет перевод, ее положение определяется линейными координатами движения ссылки.
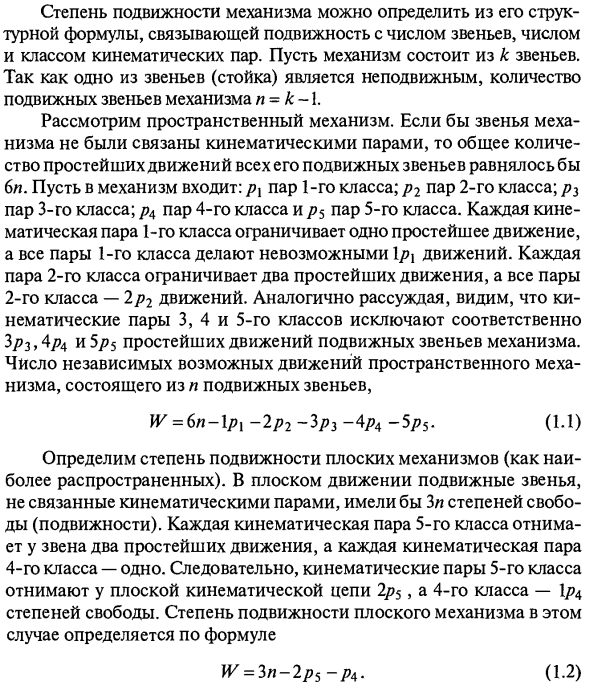
- Степень мобильности механизма можно определить из структуры, которая связывает мобильность с количеством звеньев, количеством кинематических пар и классом. Настройте механизм с помощью k ссылок. Поскольку одно из звеньев (стойка) является фиксированным, количество подвижных звеньев в механизме составляет n = k -1. Рассмотрим пространственный механизм. Если звенья механизма не связаны в кинематической паре, общее число простых движений всех их подвижных звеньев равно VP. Включите в механизм следующее: Первая пара пикселей класса. /? 2 комплекта 2-го класса. /? Три пары в третьем классе.
Пара 4-го класса и пара 5-го класса. Каждая пара во втором классе ограничивает движения двух самых простых движений и всех пар во втором классе -2p2. Аналогично, мы можем видеть, что кинематические пары 3, 4 и 5 классов исключают Zp> 4/4 и 5 пс соответственно из простейшего движения подвижной части механизма. число независимых возможных движений пространственного механизма, состоящего из n подвижных звеньев, W = bn- \ Px -2p2 -3 /> 3 -4 /> 4 -5p5. (1.1) Определяет степень подвижности (наиболее распространенного) планарного механизма.
Каждая кинематическая пара в первом классе ограничивает одно базовое движение, и все пары в первом классе делают движение Ipx невозможным. Людмила Фирмаль
В плоском движении мобильные соединения, которые не связаны кинематической парой, имеют 3n степеней свободы (мобильности). Каждая кинематическая пара в пятом классе занимает два простых движения от ссылки, и каждая кинематическая пара в четвертом классе берет один. Таким образом, кинематическая пара 5-го класса берет 2p5 из плоской кинематической цепи и 4 степени свободы в 4-м классе I />. Степень подвижности планарного механизма в этом случае определяется по формуле (1.2) W = 3p-2p5-P4.
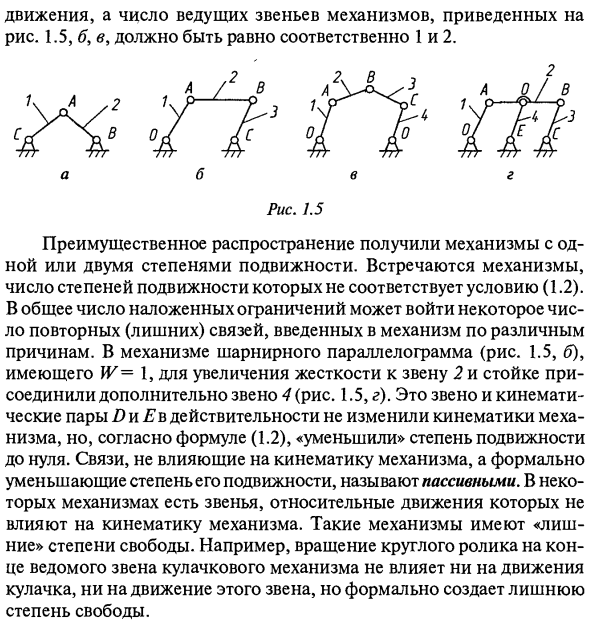
Зависимости по имени автора (1.1) и (1.2) называются выражениями Малышева и Чебышева соответственно. Они помогают оценить, можно ли использовать ту или иную цепь движения в качестве структурной схемы механизма, и количество ключевых звеньев в механизме. Таким образом, для схемы, показанной на рисунке, 1,5, a — c и подвижность равны 0,1 и 2 соответственно. 1,5 а, не может быть использован для конвертации Количество движений и основные звенья механизма, показанные на рисунке 1.5, b, c, должны быть равны 1 и 2 соответственно. A / 2 ■ 3 в г Рисунок 1.5 ■ 2 в б но
Наиболее распространенным является механизм с одной или двумя степенями подвижности. Существует механизм, при котором номер мобильности не соответствует условию (1.2). Общее количество наложенных ограничений может включать определенное количество повторных (ненужных) соединений, которые вводятся в механизм по разным причинам. Чтобы увеличить жесткость, шарнирный параллелограммный механизм W-1 (рис. 1.5, b) добавил дополнительную связь 4 к звену 2 и стойке (рис. 1.5, d). Эта связь и действительная кинематическая пара D и EV не изменили кинематику механизма, но «снизили» подвижность до нуля согласно уравнению (1.2).
Связи, которые не влияют на кинематику механизма, но формально снижают степень его подвижности, называются пассивными. Некоторые механизмы имеют звенья, в которых относительное движение не влияет на кинематику механизма. Такой механизм имеет «лишние» степени свободы. Например, вращение круглого ролика на конце ведомой тяги кулачкового механизма не влияет на движение кулачка или движение этой тяги, но формально создает дополнительные степени свободы.
Смотрите также:
| Определение напряжений при кручении стержней с круглым поперечным сечением | Классификация механизмов |
| Звенья и кинематические пары механизмов | Задачи и методы кинематического анализа плоских механизмов |
