
Оглавление:

Аналитический метод кинематического исследования механизмов
- Метод анализа кинематического исследования механизма Функция положения. Функция положения механизма понимается как зависимость qk = qk (q). Это соединяет ведомую часть (-ую) и ведущую часть механизма. Где qk — это параметр, который определяет положение подчиненной связи. q является независимой переменной, которая определяет положение предыдущей ссылки. Функция положения — это геометрическая характеристика механизма. В то же время вы можете установить закон движения ссылки чтения q = q (t) и использовать его в исследованиях кинематики.
Если ведущее звено находится в паре с поворотом (см. Рис. 1.3, а), функция положения задается в виде qk = qk (ф). Где Ф — угол поворота ведущего звена. Если ведущее звено является частью пары перевода (см. Рис. 1.3, в), функция положения задается в виде qk = qk (s). Где s — смещение произвольно выбранной точки на ведущем звене относительно фиксированной системы координат, связанной с распоркой.
Зависимость qk = qk (/) представляет закон движения ведомой единицы. Людмила Фирмаль
Передаточная функция. Аналог скорости и ускорения. Передаточная функция является первой производной функции угла поворота ведомой тяги или положения ведомой тяги по отношению к линейному движению: dsk / * Лр, dsk / ds, dyk dq> k / ds. Мгновенное значение передаточной функции определяется отношением мгновенной скорости звена привода и предыдущего звена. Если угол поворота φ * задан в виде функции φ * = φ * (φ), угловая скорость ω * этой связи может быть выражена как: CO * = = -j- = ОЗСОф = co / * „, (2.1) DT </ F DT DY Где ω — угловая скорость ведущего звена, измеренная в радианах в секунду (рад / с, с «1). Sof = dqk / dy — передаточная функция или аналог угловой скорости k-го звена.
При одинаковом типе перемещения ведомого звена и приводного звена передаточная функция обозначается ikn и называется передаточным отношением от звена к звену p. Дифференцирующее уравнение (2.1) по времени дает угловое ускорение звена ЭКК. dwk d, h ^ soft (/ co </ Sof dip da 2 = CO-f + Sof- = co2ef + esof, cftp dt dt f f Где ef = * / soft / * / f-k-vo аналог углового ускорения звена, e — угловое ускорение звена чтения. Точно так же вы можете получить уравнения скорости и ускорения для любой точки ссылки. Таким образом, скорость и ускорение звена и его точек всегда можно выразить с помощью соответствующего аналога скорости.
- Механизм привода звена ускорения и угловой скорости и ускорения. Примените метод анализа кинематического исследования к механизму скольжения кривошипа (см. Рисунок 1.7). Для основного звена механизма используйте кривошип 1 и предположите, что зависимость q = φ известна. = со / Аналитическое исследование наиболее удобно проводить Векторный контурный метод. Каждая схема плоского рычажного механизма может быть представлена в виде замкнутого многоугольника, состоящего из одного или нескольких замкнутых векторных контуров.
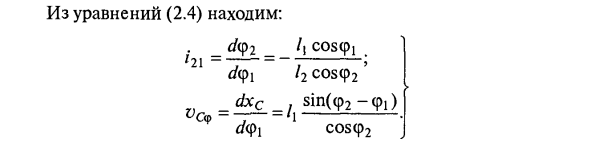
Если ссылка имеет фиксированную точку, желательно нарисовать вектор, который появляется из нее. Для каждого такого контура вы можете создать векторное уравнение замыкания. Это далее распространяется на два уравнения контурной проекции на оси декартовой системы координат. Представляет контур OABCO в виде векторной суммы. T + T {+ T2 = XC. (2.2) Проецирование каждого на ось OXwOY \ (2.2) дает: / 1 cos (2.4) xc = l \ coscpi + z2 1- Шатун 2 с передаточной функцией / 21 и линейной скоростью аналога vC (звено J точка C p) для определения угла поворота (pj: BSHF! -721Z2sin92 = aSp; Zj cos9j + Z2jZ2 cos (p2 = 0.
Механизм связи представлен в виде векторов. Людмила Фирмаль
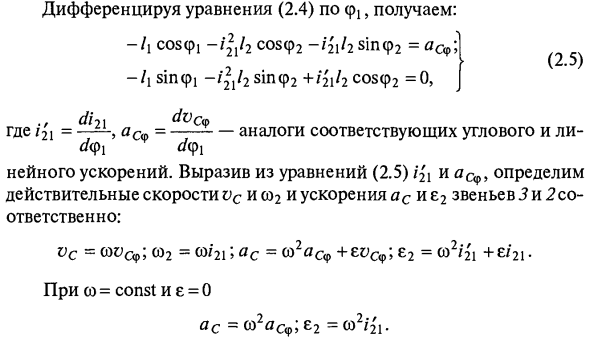
Из уравнения (2.4) видно, что: _ dy2 _ cos (p !. 21 ——- » Yaf 1/2 SOBf2 dxc, $ w (f2-f!) VC _ — / j— д (п \ уют2 Дифференцирующее уравнение (2.4) по cpj дает: — /, Cos (pi- / 22j / 2 coscp2 -ii \ h sincp2 = ССф;) ‘У,’ Я \ sinph! — / 2j / 2sin92 + ’21 ^ 2 C0S (p2 = 0, di 21 dVcv Где / 21 = -, acph = — соответствующий аналог угла, d <$> \ dq>! Разогнать немного. Из уравнений (2.5) i [{и dCph, определите фактические скорости vc и co2 и ускорение ac2 блоков 3 и 2 соответственно. vc ^ coc ^ cog = co / 21; ac = co2 ^ cf + £ ^ c
e2 = co2 / 2’i + £ / 21. co = const и e = 0 a c = co2aCp; e2 = co2 / 2V
Смотрите также:
| Классификация механизмов | Графоаналитические методы кинематического исследования механизмов |
| Задачи и методы кинематического анализа плоских механизмов | Метод кинематических диаграмм |
