
Оглавление:

Графоаналитические методы кинематического исследования механизмов
- Метод графового анализа для кинематических исследований механизмов. Как планировать Вы можете создать план для положения, скорости и ускорения точки соединения механизма, используя определенный метод мгновенного планирования времени. План положения механизма — это графическое представление относительного положения ссылки в соответствующий момент времени, выполненное в масштабе !! / Построение плана положения начинается с изображения кинематики механизма конкретной позиции предыдущего звена.
Обычно план механизма создается на 12 или 24 позиции на ведущем звене. Локус любой точки на механизме можно легко определить из этих планов, соединив точки с одинаковыми именами с гладкой кривой. Величина и направление скорости и ускорения точек механизма графически представлены планом скорости и планом ускорения. Построение плана скорости и ускорения основано на графическом решении векторных уравнений распределения скорости и ускорения в твердом теле.
Положение ведомого звена определяется методом геометрических линий, а положение кинематической пары фиксируется Людмила Фирмаль
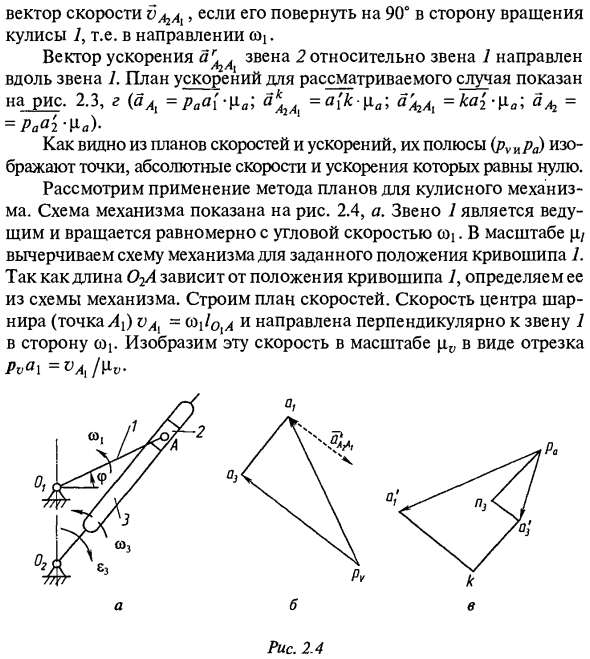
Скорость точки A3 при вращательном движении звена J вокруг точки 02. Эта скорость ориентирована перпендикулярно ссылке 3. Точка 02 стационарная. Vfy = 0. Уравнение (2.6) решается графически (рис. 2.4, б). Нарисуйте линию, параллельную {02L от точки, и прямую, перпендикулярную 02L, от полюса pv. Эти пересечения определяют конечную позицию вектора pva3 с абсолютной скоростью точки A3 и точки a3 за кулисами 3. Vector3 указывает направление относительной скорости x) AzA].
Из скоростного плана: З = vAJlA (h = (\ pva3 \ iv) K \ 02A \ il). Направление p33 указывает направление co3 применительно к точке 3 на линии 3. В этом положении звено 3 вращается против часовой стрелки. Перейдите к построению плана ускорения (рис. 2.4, в). Ускорение в центре сустава равно ^ = anA = co \ ^ ooh (.a \ = Since = 0). Вектор a nA направлен из точки A в точку 0 . На плоскости это ускорение представлено отрезком paa \ = aL {, определяющим ускорение aA} в точке A3 звена 3. Это совпадает с шарнирным центром совмещенным на месте механизма.
- Учитывая движение точки A3 на крыле 3, запишите два векторных уравнения сначала для центра шарнира Ai, а затем для центра вращения крыла 02. = «a1 a l * + (2-7) Ускорение аА [известно и а ^ = 0. Кориолисовое ускорение t * A} Al — формула a \ l = 2 ° C vAyAl = 2 ((\ pva3 \ iv) / (\ 02A \ iiI)) (\ ala3 \ [Lv) = \ a {k \ [ia.
Вектор vA) Ориентирован в том же направлении, что и A (направлен при повороте на 90 ° в направлении угловой скорости ω3 задней сцены 3. Вектор agA ^ относительного ускорения в точке задней остановки A3 относительно ползунка 2 параллелен 02L Вектор нормального ускорения точки А3у, возникающий при вращении крыла 3 вокруг точки О2, направлен из точки А в центр 02. Это ускорение aHog = V ! l * s1Cr) 2 / (км *! /).
Решим уравнение (2.7) графически. Укажите a {Установите сегмент a {k y, представляющий a на шкале в стороне, и проведите линию, параллельную 02A, через точку k. Из полюса pa (из ^ = 0) нарисуйте отрезок p (p3 | xa> на шкале и отложите его в сторону, затем проведите прямую линию, параллельную точке ^ через точку n3 3 —
Вектор a \ b0g тангенциального ускорения точки A3 за кулисами при вращательном движении вокруг точки 02 ориентирован перпендикулярно звену 3. Людмила Фирмаль
Вектор абсолютного ускорения в точке A3 Конец RaazD.e. Вектор a [k wa3n3 представляет масштаб | xa и соответствующее ускорение tf * ^. Угловое ускорение за сценой определяется из плана ускорения. е К 3 1 (nl PIA \ VL, ‘ Направление e3 определяется вектором n3a3i, когда он переносится в точку Lz за кулисами. В этом случае направление е3 противоположно направлению со3, то есть крыло вращается медленно.
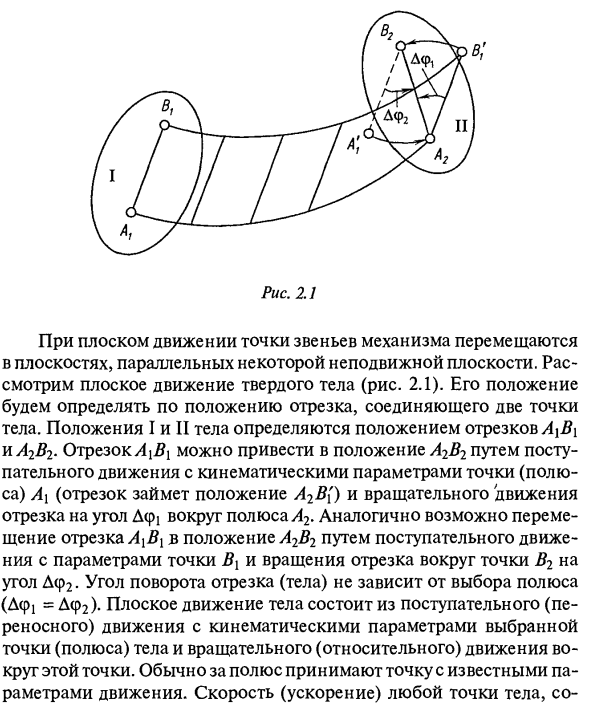
Рисунок 2.1 При плоском движении точки сцепления механизма перемещаются в плоскости, параллельной неподвижной плоскости. Рассмотрим плоское движение твердого тела (рисунок 2.1). Его положение определяется положением сегмента, соединяющего две точки тела. Положения тела I и II определяются положениями сегментов A \ B \ и A2B2. Сегмент A \ B \ можно переместить в положение A2B2, преобразовав кинематические параметры точки (полюса) A \ (сегмент A2B [take] и вращательное движение сегмента на угол Dp!
Полюс A2 Аналогично, вы можете переместить сегмент A \ B \ в позицию A2B2, перемещаясь с использованием параметров точки Bx и поворачивая сегмент на угол Дф2 вокруг точки B2. Угол поворота тела не зависит от выбора полюса (Af! = Df2). Плоское движение тела представляет собой поступательное (переносное) движение с кинематическими параметрами выбранной точки (полярной)
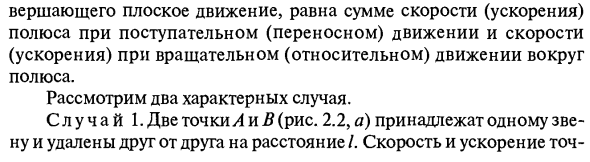
Он состоит из вращательного (относительного) движения вокруг этой точки, обычно точка с известным параметром движения рассматривается как полюс, скорость (ускорение) любой точки на теле, Выполнение плоского движения равно сумме скорости (ускорения) полюса при поступательном (подвижном) движении и скорости (ускорения) при вращательном (относительном) движении вокруг полюса. Рассмотрим два разных случая. Случай 1. Две точки A и B (рис. 2.2, а) принадлежат одному звену и отделены друг от друга расстоянием /. Скорость и ускорение
Ки А известен, поэтому отведи ее к Полу. Тогда vB = vA + vBA, где vBA — скорость точки B во вращательном движении вокруг точки A (VBA-1-АВ). Представляет скорости точек A и B с отрезками hg и pvb, построенными из произвольно выбранной точки pv по шкале jxv [(м / с) / мм] (рисунок 2.2.6). pva = vA / \ iv \ pvb = vB / \ iv, соедините концы этих сегментов (точки a и b). Результирующий треугольник pvab называется планом скорости соединения, а точка pv называется полюсом плана скорости. Рисунок 2.2 Угловая скорость звена может быть определена по формуле: = vBA / l = ab \ Lv //. Направление с определяется, когда вектор bVA применяется к точке B. Обычно направление относительной скорости определяется из плана скорости.
Относительная скорость направлена на букву плана скорости, который идет первым с индексом 6. б к Ускорения в точках A и B (рис. 2.2, c) объединяются следующим уравнением:ab = «A + avl = aA + apr + agvl. Общее относительное ускорение ABA при вращательном движении точки B вокруг точки A состоит из нормального APA, направленного в центр вращения точки Z. B к A, и касательная aVA ориентирована перпендикулярно сегменту лекарства. Модуль нормального ускорения определяется с использованием плана скорости.
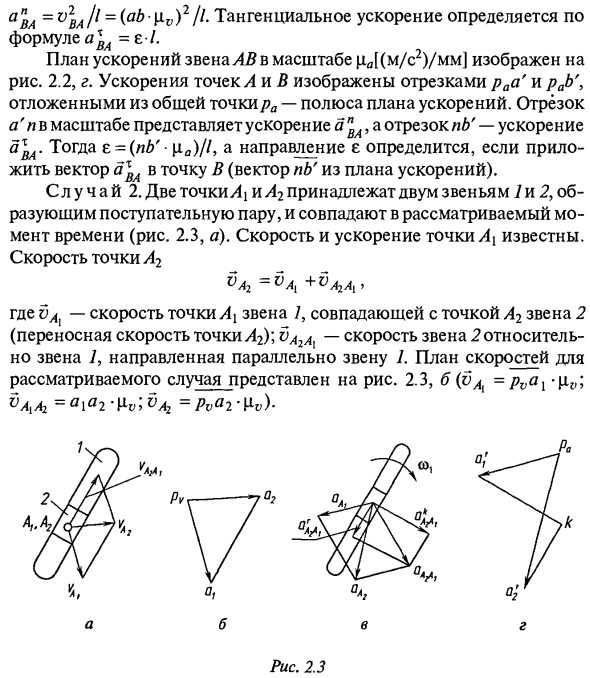
avl ~ vIa A = ‘l-O2 A-тангенциальное ускорение определяется по формуле aXVA = e /. На рисунке показан план ускорения для звена АВ шкалы CD [[м / с2) / мм]. 2.2, д. Ускорение в точках A и B представлено полюсами отрезков paa ‘и pa \ -ускорения, расположенных вдали от общей точки. Сегмент a ‘n на шкале представляет ускорение a pVA, а сегмент nb представляет ускорение aVA. Затем e ~ (nbr • \ Q) / l и направление e определяются путем применения вектора aBA к точке B (вектор nb ‘из плана ускорения). Случай 2. Две точки A \ и A2 принадлежат двум звеньям 7 и 2, образуют трансляционную пару и в этот момент совпадают (рис. 2.3, а).
Скорость и ускорение в точке А \ известны. Скорость А2 = VA [ Где vA [скорость соединения точки Ax / соответствует точке 2 связи A2 (скорость порта точки A2). Скорость ссылки 2 относительно ссылки 7 параллельна vAzAl-ссылке 7. На рисунке показан план скорости для рассматриваемого случая. 2,3, b (vA [= pva {- | 1r, ^ A {A2 = axa2- \ iv \ vAl = pva 2- \ iv). г Рисунок 2.3 б е Если переносное движение не является поступательным (Рис. 2.3, c), ускорение в точке 2 состоит из трех ускорений: переносное (т.е. ускорение в точке Ai), Кориолиса (вращение) и относительное: Кориолисовое ускорение a * ^ = 2 (0 ^^, где (Oi — угловая скорость звена 7. Направление ускорения Кориолиса ak равно
Когда вектор скорости vAlAi поворачивается на 90 ° в направлении вращения крыла 7, то есть в направлении карпа. Вектор ускорения a 2 звена 2 относительно звена 7 направлен вдоль звена 7. На рисунке 5 показан план ускорения для рассматриваемого случая. 2.3, r (aA [= paa [- \ La \ aC = a {‘k- \ ia; a’MAx = ka [- \ iQ \ a ^ = Как видно из плана скорости и ускорения, полюсы от 0 (УУЦРа) отражают точку, в которой абсолютная скорость и ускорение равны нулю.
Рассмотрим применение метода планирования механизма запирания. Схема механизма показана на рисунке. 2.4, а. Звено 7 находится сверху и вращается равномерно с угловой скоростью coj. Нарисуйте схему механизма конкретного положения кривошипа 7 по шкале 1 /. Поскольку длина 02L зависит от положения кривошипа 7, она определяется по схеме механизма. План скорости создается. Скорость в центре шарнира (точка vA [= ω \ 10ia, направленная на кой, перпендикулярную ссылке 7. Масштабируйте эту скорость | iv с сегментом Pv <* 1 = VA [/ \ lv. Рисунок 2.4
Определите скорость vA} точки A3 за кадром J. Это совпадает с шарнирным центром / 1 в данный момент. Напишите два векторных уравнения для центра шарнира A сначала, а затем для точки 02y, с учетом движения точки A3. vA> = vAt + vA) Al; vAz = v0l + vAj (ч. (2.6) Скорость скольжения vАГА {Точка A3 звена 3 относительно центра шарнира Ai ориентирована параллельно 02A. vAj02- относительная
Смотрите также:
| Задачи и методы кинематического анализа плоских механизмов | Метод кинематических диаграмм |
| Аналитический метод кинематического исследования механизмов | Соотношение скоростей в высшей кинематической паре |
