
Оглавление:

Метод кинематических диаграмм
- Метод кинематической карты Концепция кинематической схемы. Смещение (s, φ), скорость (v, ω) и ускорение (a, e) определяются методами, рассмотренными выше, для многих положений механизма, которые близки друг к другу. Обычно период перемещения ведущей линии делится на 12 позиций, и для каждой позиции создается план механизма. На основе полученных значений этих величин вы можете создать график, называемый диаграммой упражнений.
Например, для механизма ползуна кривошипа (см. Рис. 1.7) вы можете создать диаграмму движения ускорения точки C ползунка в зависимости от смещения 5C, скорости vc и угла поворота кривошипа: sc = — * s (F); vc является ac (f). ac ~ ^ c (f) или время t. sc = sc (t) и т. д. Простейшим способом является создание кинематической схемы движения механизма (точки) движения.
Каждая кинематическая диаграмма представляет собой графическое изображение одного изменения кинематических параметров исследуемого звена механизма или точки звена, как правило, в зависимости от времени или движения ведущего звена. Людмила Фирмаль
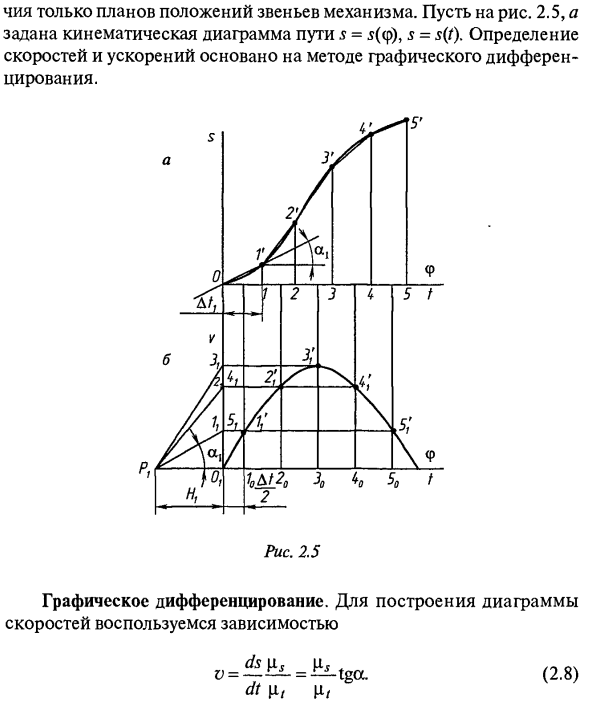
Чтобы построить их достаточно Планируйте только расположение механизма ссылок. Давайте сделаем диаграмму. 2.5, и диаграмма траектории движения 5 = s (cp), 5 = s (t). Определение скорости и ускорения основано на методе графического дифференцирования. Графическая дифференциация. Используйте зависимости для создания диаграмм скорости ^ bL ^ тга. (2.8) дт с, джи / Рассматриваемая скорость времени пропорциональна тангенсу угла тангенса в соответствующей точке кривой графика смещения. Уравнение (2.8) является основой для графического дифференцирования.
Истинная скорость определяется путем рисования тангенса кривой s = s (t) и определения тангенса угла наклона относительно горизонтальной оси. Вместо тангенса Проще нарисовать код. Это заменяет кривую s = s (t) пунктирной линией, выгравированной на ней, что делает ее более простым, но менее точным методом, то есть методом кода. Суть метода кодирования заключается в следующем. Разделите сегменты по горизонтальной оси от 0 до 5 (рис. 2.5, а) на одинаковое количество частей от 0 до 1. 1-2; … и в точках 7, 2, …, 5 нарисуйте ординату на пересечении кривой 5 = s (t) в точках 7 ‘, 2’, …, 5 ‘ вы.
- Соединение этих точек прямой линией приводит к пунктирной линии 0-742′- .. -5 ‘. Для создания диаграммы скорости выберите начальную точку новой системы координат — точку 0 {(рис. 2.5, б). На горизонтальной оси слева от точки 0X отложите любой сегмент 0X P \ = # i, называемый полярным расстоянием. Затем проведите параллель к {code 0-GuÃ-2 \ …, 4′-5 ‘через точку P. Лучи Р {1 {9Р \ 2 \, … 0-7, 7-2, -5 и удовлетворяют соотношению 0 \ 1 \ -tfitgci! = = * cpi, В! | 1, Где vcp — средняя скорость, масштабированная по временному интервалу Atx (рис. 2.5, а). Сегмент 0 \ 1 \, чтобы получить шкалу II * = J * ‘[–1, т.е. pc1 = \ 0 {7, | iv кривая vcp = vcp (t) Среднее значение шкалы скорости ордината 0 {1b 0 {2b …, 0 \ 5 \ должна быть перенесена в среднюю точку соответствующего сегмента (At / 2) оси абсцисс и вершины ординаты.
Соедините точки 7 /, 2 [, …, 5 / гладкими кривыми. Дифференцирование кривой v = v (t) с графиком дает диаграмму ускорения движения a = a (t). Конфигурация кривой a to a (t) такая же, как конфигурация v = zXt. Чем меньше сечение, которое делит исследуемую кривую вдоль оси, тем меньше Абсцисса, метод дифференциации более точный. Рассмотренный метод широко используется в кинематических исследованиях механизмов. Анализ кинематической диаграммы v = горит) и a = a (t) (особенно последний) может определить динамическую нагрузку, создаваемую механизмом, и, следовательно, надежность механизма.
Истинное значение средней скорости в каждый момент определяется по формуле v- \ iyvcp. Людмила Фирмаль
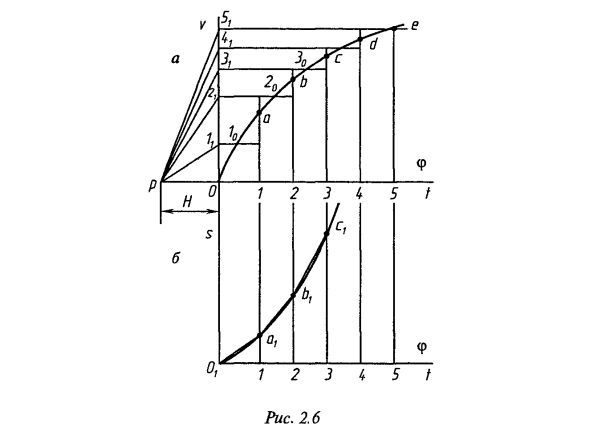
Избегайте ударов по механизму только тогда, когда: Ускорение звена кинематической диаграммы a = a (t) изменяется плавно. Таким образом, часто приводится график ускорения толкателя (например, в случае кулачкового механизма), и требуемый график этого движения определяется методом графического интегрирования. Это также тот случай, когда закон движения толкателя не имеет значения и устанавливается только его максимальный ход (I). Например, эти требования предъявляются к кулачковым механизмам, используемым в различных устройствах реле и команд. Графическая интеграция. Дайте диаграмму v = v (t) (Рисунок 2.6, а).
Курс обучения очков за определенный период «2 Изменение s = y.v \ ± {jvdt. Это задача <] Структура интегральной кривой 5 = s (t) для данного v = xAf будет определять и суммировать площадь множества вертикальных полос. Вы можете выполнить эту задачу графически следующим образом: Разделите кривую v = v (t) на точки ay bt c, d, e и разделите ее на участки, соответствующие временам 0-1, …, 4-5. Значение сегмента 70> 3) «Проект по определению средней скорости каждого участка на точку»
Получите точки 1b 2b …, 5 \ на оси ординат. Соедините эти точки с лучом полюса P, выбранным на оси абсцисс на расстоянии # от точки 0. Далее выберите начальную точку (точка 0 ) новой системы координат (рис. 2.6, б) внутри соответствующего разбиения ^ -7, 7-2, 4-5, линия 0 вдоль горизонтальной оси \\ 9 axL b \ c {… Рисует параллельно с лучами P1 {P22 …. Нарисуйте плавную кривую через точки (ai bb cc …). Путь 5 = с (/). Масштаб диаграммы пути составляет jis = А [м / мм]. Вышеуказанный метод графической интеграции широко используется при синтезе кулачковых механизмов. Под синтезом понимают определение формы и размера кулачка и встречают движение, которое должен выполнять поршень.
Смотрите также:
