
Оглавление:

Частные случаи приведения пространственной системы сил
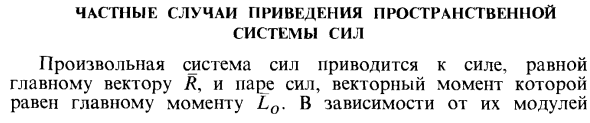
- Система произвольных сил сводится к паре сил, равных главному вектору A, и силам, вектор-момент которых равен главному моменту Lo. В зависимости от модуля Рис. 73. И взаимное направление, то есть угол α между ними, может быть дополнительно упрощено. Принеси пару сил. При R = 0, £ o ^ 0 система сил сводится к набору сил, и главный момент в этом случае не зависит от выбора центра редукции согласно (2). В рассматриваемом случае оба инварианта системы сил равны нулю, т.е. I = 0; LoR = 0.
Сведение к результатам. Есть два случая. 1d_If R = £ 0, LOi = 0 (первый инвариант — H ^ 0, второй — Lo R = 0), система обладает объединенной силой R ‘- силой, равной по величине и направлению главному вектору R, т.е. R ′ = R. В этом случае линия действия результирующей силы проходит через центр замедления. 2. Если R ^ O, Lo ^ 0, но ot = 9 °, т.е. LO1.R (H1 для первого инварианта, о ° H = 0 для второго), система сил также уменьшается до результата и снова R ′ = R.
При расчете момента инерции однородного плоского участка для заданной оси плоскому участку присваивается базовая область и известен момент инерции для соответствующей оси. Людмила Фирмаль
Однако линией действия результирующей силы R ‘является расстояние d = Lo! Он отделен от центра замедления R. Фактически, в этом случае существует пара сила-сила с векторным моментом Lo, а пара векторных моментов перпендикулярна силе R, поэтому пара сил может рассматриваться как находящаяся в той же плоскости, что и сила R (рисунок 73). Изменяя силу пары и ее плеча при вращении и перемещении некоторых сил в этой плоскости и поддерживая векторный момент, вы можете получить одну из сил пары R ‘. Хотя он равен по величине, он находится в направлении, противоположном главному вектору R. Другая сила пары R ‘является результирующей силой.
Это потому, что две системы (I, I ‘) <\ eO равны по величине, но противоположны по силовому направлению и могут быть отброшены. Таким образом, рассматриваемая система сил оказалась равной одной результирующей силе «I». Это имеет то же абсолютное значение и направление, что и основной вектор I. Пара сил (R ‘, R *) определяется из условий d = L0IR, Потому что я = я ‘= я’ ‘.
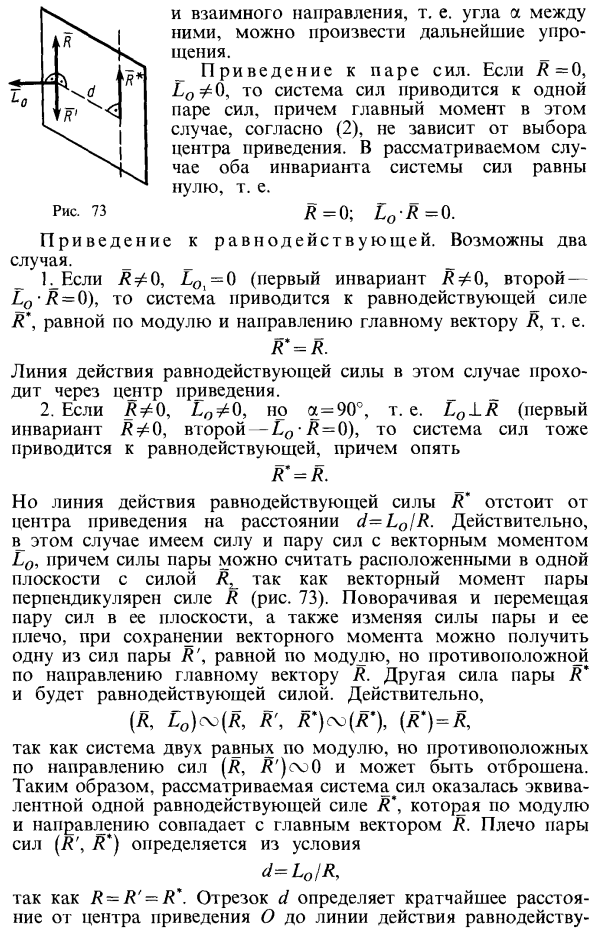
Сегмент d определяет кратчайшее расстояние от центра снижения O до линии действия в минутной точке Рис. 74 Рисунок 75 «Сила R». Первый случай — это второй частный случай, когда точка, расположенная на линии действия результирующей силы, является центром уменьшения О. Это приводит к динамо. Механика динамики называется комбинацией силы F и пары сил (F1; F ), действующих на твердое тело, и сила перпендикулярна действующей поверхности пары сил (рис. 74). Используя векторный момент M пары сил (F \, F’i), вы также можете определить динамо как сумму силы и пары, параллельной векторному моменту, как пару сила-сила (Рис. 75).
- Векторные моменты силы F и силы М могут быть направлены либо в одном направлении, либо в противоположном направлении. Теперь рассмотрим R / 0, Lo ^ 0, а векторы Lo и R не перпендикулярны. В этом случае оба инварианта не равны нулю. R * 0, Lo R ^ 0. В этом случае мы видим, что система сил сводится к динамо, а элементами динамо являются сила Rt = R и парный момент Ll = L0 cosа. Где a — угол между векторами Lo и R. Вектор R и главный момент Eo. Косинус угла a между ними можно определить, выразив скалярное произведение векторов Lo и R в двух формах. Lo Ro cos a = Lx Rx + Lf R „+ Lz Rz; L.R, + L, R + L, R, COS a = -i — i.
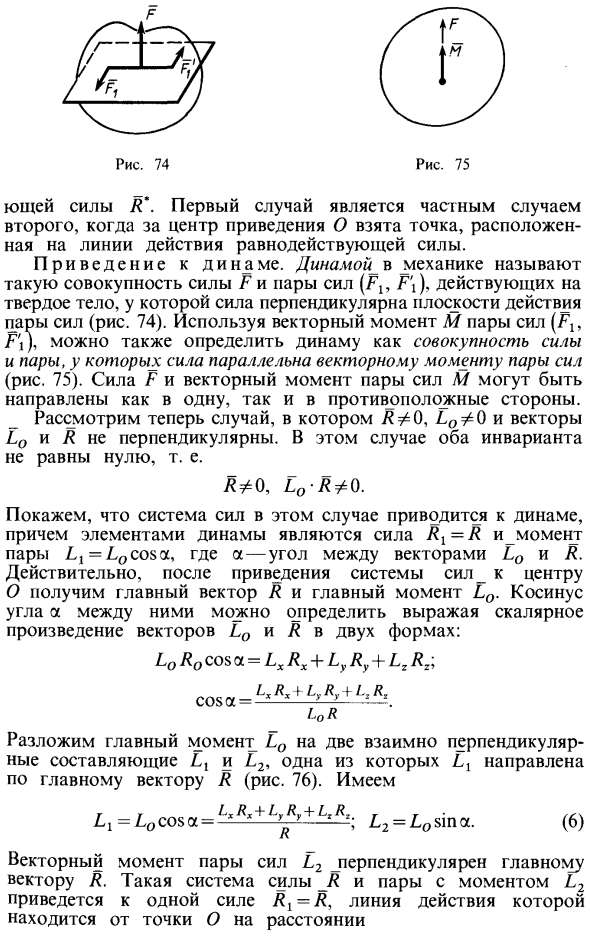
Главный момент Lo разлагается на две взаимно перпендикулярные составляющие Lt и L2, одна из которых направлена вдоль основного вектора R (рис. 76). У нас есть Ll = Locosa = -i-i-; L2 = Losina. (6) Векторный момент силовой пары E2 перпендикулярен основному вектору R. Такая пара силовых систем R и момент L2 сводится к одной силе Rt = R, и ее линия действия находится на расстоянии от точки O Рис. 76 Рассматриваемая система сил была заменена эквивалентной системой сил, состоящей из пары сил с векторным моментом £, который может быть передан в качестве свободного вектора в любую точку, включая точку Ot линии действия силы-силы Rt.
Когда центр уменьшения точка на поверхности оси цилиндра является винтовой осью центра, основным моментом для такого центра будет тот же модуль упругости, основной момент для генератора цилиндра. Людмила Фирмаль
Проще говоря, результат может быть выражен в следующем формате: (,, О °) ° ° (Λ „L ^, Кроме того, система сил (Rt, £) является динамо. Векторный момент силы Rt и пары L имеет элемент динамо. ПГГДД ,, + Л ,, + ,,,, Ri = R, Li = Locosa = — ^ — (8) Линия вдоль силы динамо Rt называется центральной спиральной осью. В каждой точке спиральной оси система сил сводится к тому же динамо, что и центр редукции. Расстояние от центра привода О до центральной спиральной оси д = розина / р При центрировании редукции точки на поверхности цилиндра, ось которого является центральной спиральной осью, основные моменты вокруг таких центров имеют тот же модуль упругости и тот же угол, что и образующая цилиндра.
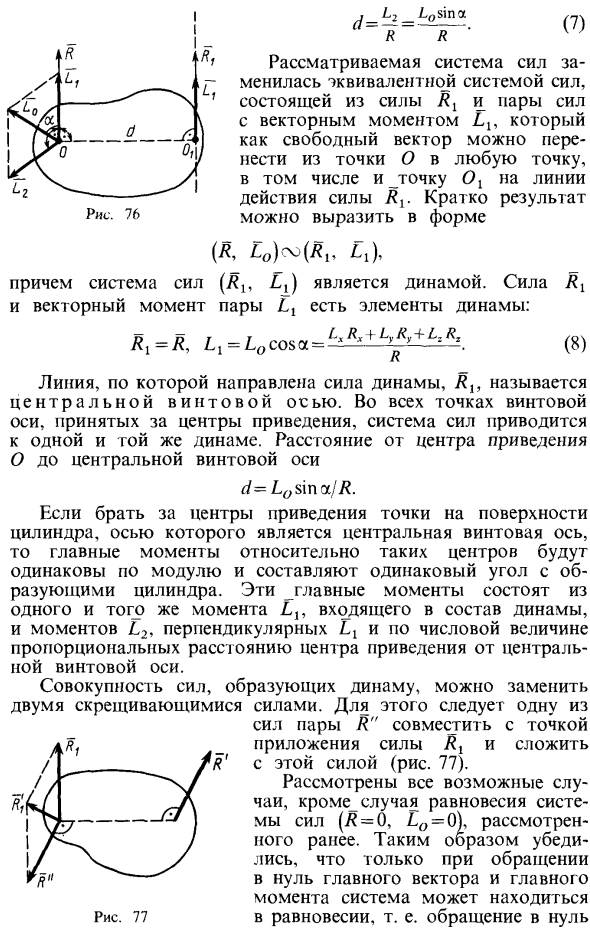
Эти основные моменты состоят из одного и того же момента £, который является частью динамо, и числового момента £ 2, который перпендикулярен Lt и пропорционален расстоянию центра замедления от центральной спиральной оси. Набор сил, образующих динамо, можно заменить двумя пересекающимися силами. По этой причине одна из сил пары R » должна быть объединена с точкой действия силы Rx и добавлена к этой силе (рис. 77).
Рассматриваются все возможные случаи, кроме случая равновесия системы сил, рассмотренного выше (H = 0, £ 0 = 0). Поэтому, только когда основной вектор и главный момент исчезают, система Рис. 77 Состояние равновесия, т. Е. Обнуление Главный вектор и главный момент не только необходимы для уравновешивания системы сил, но и достаточны. Рассматривая частный случай, который приводит к системе сил, если система сил приводится к результирующей силе A, эта сила в равной степени параллельна главному вектору R.
Смотрите также:
Задачи по теоретической механике
| Изменение главного момента при перемене центра приведения | Уравнение центральной винтовой оси |
| Инварианты системы сил | Частные случаи приведения пространственной системы параллельных сил |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
