
Оглавление:

Инварианты системы сил
- Статические инварианты называются такими величинами для рассматриваемой системы сил и не изменяются, поскольку изменяется центр убывания. Один инвариант — главный вектор. Это связано с тем, что центр вырождения представлен векторной суммой системы сил. Если O является основным вектором A в центре редукции, а A является другим O, то A = Z. (3) Следовательно, основным вектором системы сил является вектор-инвариант. Для той же системы сил это не зависит от выбора центра редукции. Из векторного уравнения (3) видно, что модуль и проекция главного вектора на любую координатную ось равны, т. Е. A = A „Rx = Rlx, Rf = Rly, Rt = Rlt. (3 ‘).
Так как общее решение однородного уравнения удовлетворяет уравнению собственных колебаний в линейном сопротивлении, то это движение не может быть колебанием, а называется собственным или собственным движением. Людмила Фирмаль
Чтобы получить второй скалярный инвариант, используйте уравнение (2): i0i = r0-ootх A. Умножьте скаляр с обеих сторон этого уравнения на Rt и умножьте вместо Rlt согласно (3) LOlRt = LoR- (66 xR) R, поскольку произведение смеси векторов, содержащих два одинаковых фактора R, равно нулю, т. Е. (О (\ xR) R = 0. >> Соотношение (4) является вторым Скалярный инвариант: скалярное произведение главного момента на главный вектор не зависит от центра редукции, второй скалярный инвариант может быть выражен двумя другими эквивалентами. Когда скалярное произведение развернуто, проекция Lo на координатные оси представлена Lix, Lti и Llz, а проекция Lo — представлена Lx, Ly и Lx.
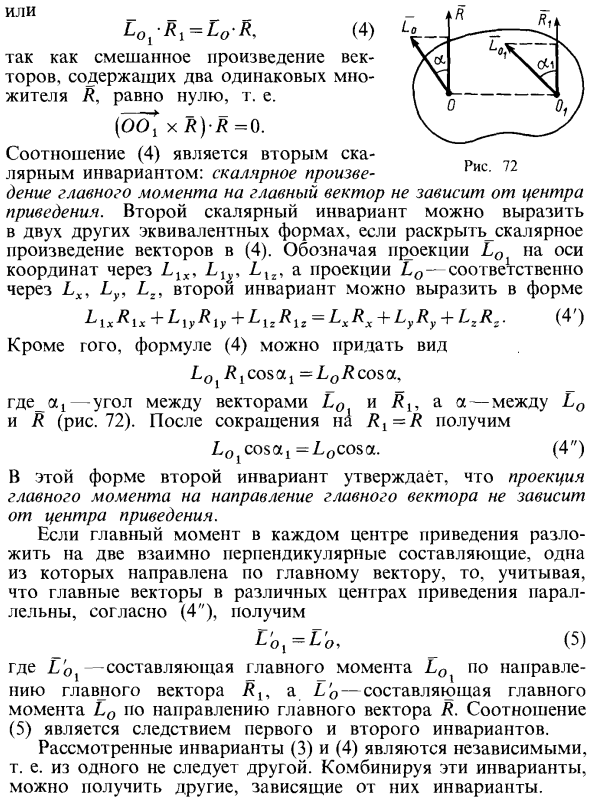
- Вторым инвариантом является LlxRlx + LlyRly + LlzRlt = LxRx + LyRy + LzR .. (4 ‘). Кроме того, мы можем дать уравнение (4) в виде Lo Rlcosa.l = L0Rcosct, где _a1 Является ли угол между векторами Lo и aa между Eo и R (рис. 72). L, = R Get Lo cosot! = Locosct. (4 «) В этой форме второй инвариант равен Указывает, что проекция основного момента в направлении основного вектора не зависит от центра редукции: если главный момент каждого центра редукции раскладывается на две составляющие, ортогональные друг другу, одна из них будет находиться вдоль основного вектора Ориентируясь, согласно (4 «), если главные векторы различных центров сжатия параллельны, мы получаем (5).
В противном случае величина реакции будет содержать квадрат угловой скорости, в результате чего угловая скорость будет реагировать с ними, а осевое давление будет очень большим, и произойдет разрушение или разрыв оси. Людмила Фирмаль
Здесь L’ot — компонента главного момента. Является ли главный вектор Rt L’o является компонентом главного момента Eo в направлении главного вектора R. Соотношение (5) является результатом первого и второго инвариантов Инварианты, рассматриваемые как (3) и (4), являются независимыми, то есть другой не следует из другого. Комбинируя эти инварианты, вы соответственно получаете другие инварианты.
Смотрите также:
Задачи по теоретической механике
| Трение качения | Частные случаи приведения пространственной системы сил |
| Изменение главного момента при перемене центра приведения | Уравнение центральной винтовой оси |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
