
Оглавление:



Динамические измерения
- До сих пор наши исследования были ограничены такими количествами, но это изменение можно игнорировать с течением времени. Такая ситуация не всегда сохраняется. Кроме того, зависимость измеряемой величины от времени может быть серьезной проблемой, например, при измерении мгновенных значений переменного напряжения или переменного тока. В таких случаях измерение O ( ) является динамическим. Изменения физических величин с течением времени называются процессами.
Процессы характеризуются постоянными параметрами. Например, для синусоидального напряжения или тока такими параметрами являются амплитуда, частота и начальная фаза. Эти измерения не являются динамическими. При воздействии изменяющихся во времени инструментов физических величин начинают проявляться инерционные свойства инструмента. Входной сигнал 1 (Нет времени реагировать на изменение 0, поэтому выходной сигнал X (1) искажен по сравнению с входным сигналом (рисунок 54).
При определении фактического зазора для фактического размера отверстия целесообразно принимать диаметр цилиндра, отмеченный на фактической поверхности, т. е. Людмила Фирмаль
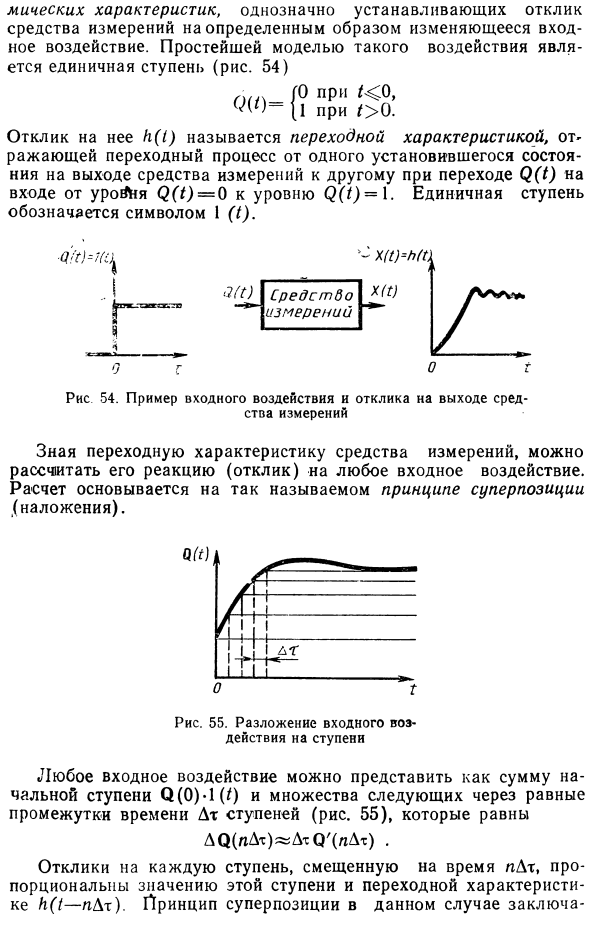
Использование обратной функции функции преобразования сигнала измерительной схемы При преобразовании во входные данные результат можно записать в виде (при условии, что функции преобразования равны для упрощения 0: е ( ) = 0 (0-Х (0- (26) (1) Определять инерционные (динамические) характеристики прибора не важно. Они представлены с помощью din. Характеристика, которая однозначно определяет реакцию инструмента на входные эффекты, которые меняются определенным образом. Простейшая модель этого эффекта — одноэтапная (рисунок 54). От- (° в ^ ° ( > 1 для 0.
Отклик K (1) на него называется переходным откликом и отражает переходный процесс от одного устойчивого состояния выхода измерительного прибора к другому устойчивому состоянию в переходном состоянии ( (1) от серого () ( 1) Один шаг (I), обозначенный от = 0 до уровня = 1. -X 1) M Рисунок 54: Пример входного эффекта и отклика на выход инструмента Зная кратковременный отклик инструмента, вы можете рассчитать отклик (отклик) на входное действие.
Этот расчет основан на так называемом принципе суперпозиции (суперпозиции). О г Рисунок 55. Разбиение действий ввода по шагам Все входные эффекты могут быть выражены в виде суммы начальной стадии O (0) -1 ( ) и набора шагов Дг (рисунок 55), который следует через равные промежутки времени, который равен ДО (пДт) = вДтО ( Оно равно лДт). Отклик на каждую ступень, сдвинутый на время IDDt, пропорционален значению этой ступени и переходной характеристике H (1 — pDt). Принцип суперпозиции в этом случае Это индивидуальный момент времени ответ на все предыдущие шаги, т.е.
При достижении пределов, таких как -> оо и Dm -> — 0, вы получаете одну из форм так называемой оверлейной интеграции (интеграция Дюамеля). X ) -O (0) (0 + ( (.) * -) * (27) Вы можете получить другие форматы с помощью простого преобразования. X ( ) -in (0 * (0> I- ky; (28) X (1) -a (0) (0+ О ( -) (, ; (29) X (() — th (o) +1 0 (1-) * (,) *. O ) С помощью этих уравнений с известными свойствами перехода к (1) можно предположить, что основная задача измерения — определение входного эффекта O ( ) по отклику на него X (I) решена вы. Тем не менее, H (I) и X (I) очень трудно решить, потому что всегда есть неопределенность в измерении.
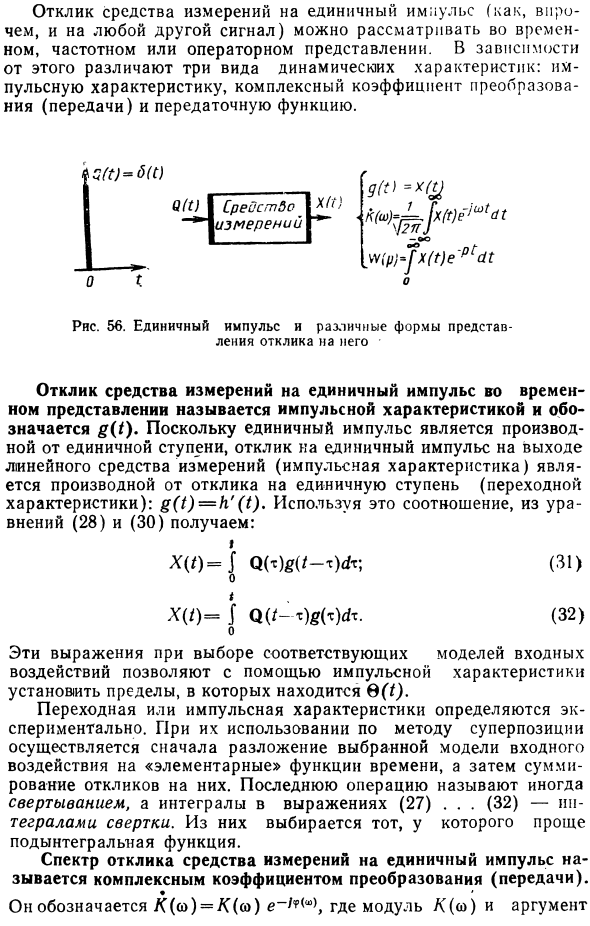
На практике это почти всегда ограничивается оценкой 0 (выше и ниже 0). По этой причине с учетом априорной информации об измеренной физической величине О (О, модели входного действия и 0r (0., 01 (0 и 02 (0 более или менее 0 (0-затем) Используя любое из уравнений (27) .. (30), известный переходный отклик прибора, X1 (0 и X2 (0 рассчитывается с использованием уравнения (26)), 01 (0 и 0r (О > 0 (0 и 0 (0: 0, (0> в (0> в. (0; Х (0 + 91 (0> 0 (0> Х (0 + с, (0- Другой тип тестового сигнала (простейшая модель входного воздействия) — это одиночный импульс (0 ^ 0- для 1 Если 1 = 0, Это вызвано, потому что область, окруженная этой функцией, является.
1. Этот тип функции (рис. 56), который является первой производной единичного шага, обозначен цифрой 6 (1) и называется дельта-функцией или функцией Дирака. Реакция прибора на один импульс (и случайно на другие сигналы) может быть рассмотрена с точки зрения временных, частотных или операторных выражений. Соответственно, различают три типа динамических характеристик: импульсный отклик, комплексный коэффициент преобразования (передачи) и передаточную функцию.
Отклик прибора на один импульс во временном представлении называется импульсным откликом, а 5 (0 — отклик на один импульс на выходе линейного прибора (импульс, потому что один импульс является производной от одного шага) Отклик) является производной от отклика на один шаг (переходная характеристика)): ё (1) =) 1 (I) -Используя это соотношение, из уравнений (28) и (30) , ad-1 WWI (1- ) L; (3 () ad-1 ( adg (ad.02) Эти уравнения используют импульсную характеристику для выбора 0 (0- Переходные или импульсные характеристики определяются экспериментально.
При использовании в соответствии со способом наложения выбранные входные модели сначала разлагаются на фундаментальные функции времени, а затем ответы на них суммируются. Последняя операция, иногда называемая сверткой, является интегралом выражения (27). , , (32) Интеграл свертки. Из них выбирается более простое подынтегральное выражение. Спектр отклика прибора на один импульс называется коэффициентом комплексного преобразования (передачи). Это выражается как K (w) = K ( o).
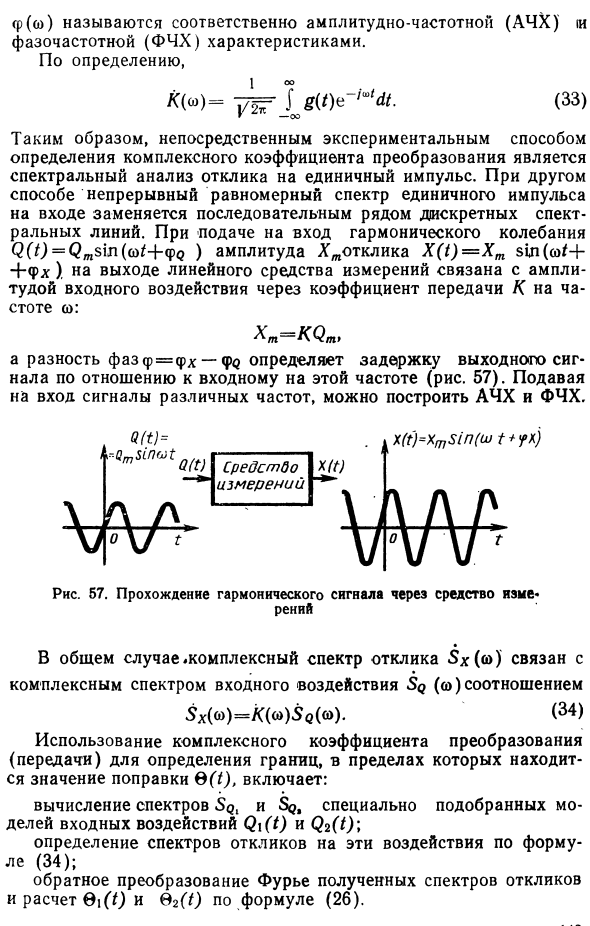
- Где модуль К ( о) и аргументы Каждое p ( >) называется амплитудно-частотной (AFC) характеристикой фазовой частоты (PFC). По определению 33> Поэтому прямым экспериментальным методом определения сложных коэффициентов преобразования является спектральный анализ отклика на один импульс. Другой способ — заменить непрерывный однородный спектр одиночного импульса на входе непрерывным рядом дискретных спектральных линий.
Для гармонических колебаний 3 (на вход подается О = Сш8т ( о + ф г)), отклик X (1) на выходе линейного измерителя = Х 8Ц1 (ф + + Амплитуда рх) связана с амплитудой входного воздействия Коэффициент передачи К на частоте f: Xm = K 1м, Разность фаз = — Определите задержку выходного сигнала относительно входа на этой частоте (рисунок 57). Вы можете построить частотные и фазовые характеристики, подав на вход сигналы разных частот. Рисунок 67. Гармонический проход В общем случае комплексный спектр отклика x (w) связан со сложным спектром входного действия 5c (f) соотношением 34.
Это сложный технический комплекс, который работает непрерывно, основное внимание уделяется поддержанию длительной эксплуатации с высокой стабильностью измерений. Людмила Фирмаль
Используйте сложные коэффициенты преобразования (передачи), чтобы определить границу, где значение коррекции 0 (7). Расчет спектров 5р и 8р, специально подобранные модели входных воздействий и Определение спектра реакции этих эффектов согласно уравнению (34); Обратное преобразование Фурье полученного спектра отклика и вычисление 0 (O и 02 (7)) по уравнению (26). Изображение реакции прибора на один импульс (по Лапласу) называется передаточной функцией и обозначается знаком X (p). Следовательно, передаточная функция связана с импульсным откликом прямым преобразованием Лапласа.
Важной особенностью передаточной функции является возможность ее теоретического определения путем решения дифференциального уравнения с использованием операторного метода, описывающего работу прибора.
Использование передаточной функции для определения диапазона ( ), который содержит значение коррекции, включает в себя: Входное действие специально подобранной модели изображения ()) (p) и () g (p) 21 ( ) и С ( ); Определение реакции на эти эффекты по формуле X (p) = ^ (p) C (p) Переход с использованием обратного преобразования Лапласа от изображения к отклику X (1) и X2 (() к оригиналу, а уравнение (26) 0 (О и Четкая взаимосвязь между рассматриваемыми динамическими свойствами подразумевает их полную эквивалентность, что предполагает возможность разумного выбора, наиболее подходящего в каждом случае.
Поэтому, если поведение прибора описывается известным дифференциальным уравнением, рекомендуется выбрать передаточную функцию, которая может быть получена путем решения этого уравнения с помощью операторного метода в качестве динамической характеристики. Если динамические характеристики определяются экспериментально, выбор зависит от типа устройства и типа входного эффекта. Как временные, так и частотные подходы к решению проблемы очень возможны. Динамические характеристики относятся к стандартизированным метрологическим характеристикам прибора и должны контролироваться на соответствие стандартам прибора при проверке прибора.
Соответствующая физическая величина должна воспроизводиться в динамическом режиме. Такая репликация является либо централизованной, либо распределенной. В связи с интенсивным воспроизведением единиц физических величин в динамическом режиме на самом высоком уровне взвешивания существуют специальные нормативы для государства. В распределенном воспроизведении используются единицы времени, отправленные из основного государственного стандарта, в дополнение к единицам измеримых физических величин. Пример 38 В качестве примера рассмотрим прохождение импульсного сигнала периода t, который проходит через промежуточный измерительный преобразователь (полосовой фильтр) с независимой АЧХ.
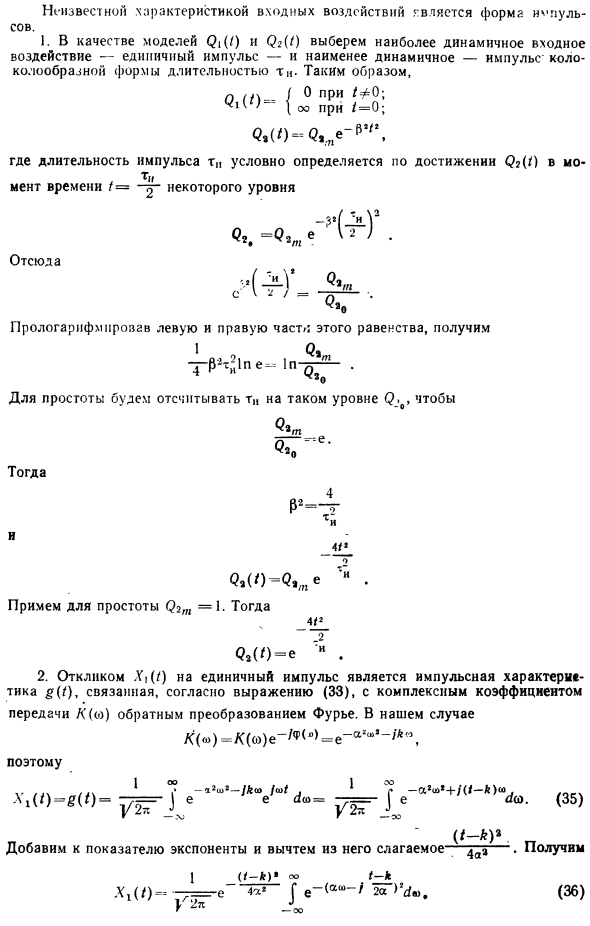
Неизвестные характеристики входного действия 1. В качестве моделей выберите наиболее динамическое входное действие — одиночный импульс и минимальный динамический импульс — в качестве моделей ^ (1) и Эг (1). Здесь длительность импульса mn определяется условно, но когда она достигает 0r ( ) в некоторой точке = определенного уровня ( , ( ) = 0, Для простоты используйте () 2m = 1. 0, (0 = е 7 ед. 2. Отклик X1 (T) на один импульс — это импульсный отклик 5 (0. Согласно уравнению (33) он связан с комплексным коэффициентом передачи K (th) обратным преобразованием Фурье.
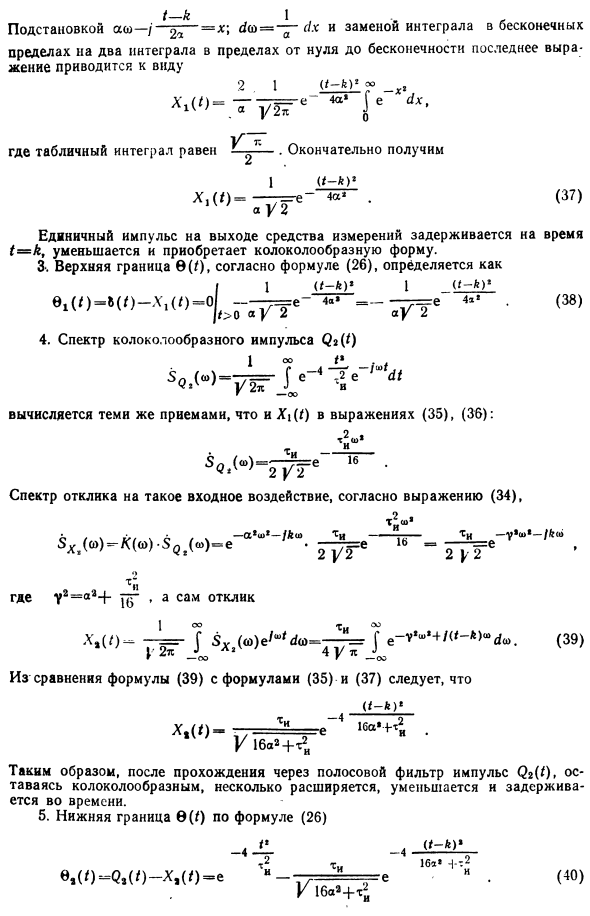
Для того, чтобы добавить Он настроен индекс , получить d лимит замещения принести гей X0 = — 1x и интегральная замена в бесконечном диапазоне х, (0 Где интеграл таблицы равен . о 5X1 (a>) ^ K ( o) -5o ( >) Рассчитано с тем же допуском Один импульс на выходе продукта 1 = k, уменьшается и принимает форму колокола. 3. Верхний предел 9 (1) из уравнения (26) определяется как: Ад-Г ^ DL- * 0 Из сравнения уравнения (39) с уравнениями (35) и (37) это становится следующим. I.
Колоколообразный импульсный ЦГ-спектр (1) Спектр отклика такого входного воздействия согласно уравнению (34) Сразу после прохождения через полосовой фильтр импульс ) r (1) имеет колоколообразную форму, расширяется, уменьшается до некоторой степени и задерживается во времени 5. Нижний предел равен 0 (0 в уравнении (26)) (40) Вход измерительного преобразователя в ( ): 6. В реальных условиях на выходе генерируется импульс. Показанная частотная характеристика и фазовая характеристика 01 ( )> 0 (О> е, (О- Анализ уравнений (38) и (40) показывает, как увеличивается влияние ширины полосы преобразователя, а фазовая задержка пропорциональна k.
Смотрите также:
| Функциональные преобразования результатов измерений | Измерение случайных величин, процессов и полей |
| Решение систем линейных уравнений методом наименьших квадратов | Показатели качества |
