
Оглавление:

Кинематическая пара
- КИНЕМАТИЧЕСКАЯ ПАРА Движение является одним из признаков машины, отличающим машину от сооружения, которое, выполняя свое назначение, в движении не находится. Инструмент, направляемый рукой человека, например игла, топор, молоток, отвертка, выполняя свое назначение, также находится при этом в движении. От инструмента, могущего совершать разнообразные
движения, машина отличается тем, что движения ее частей являются определенными: игла в руке швеи или молот в руке кузнеца могут совершать разнообразные движения, но игла в швейной машине или паровой молот совершают определенные движения. Заставить какое-либо тело двигаться определенным образом можно
лишь путем ограничения его подвижности другими телами. Например, Людмила Фирмаль
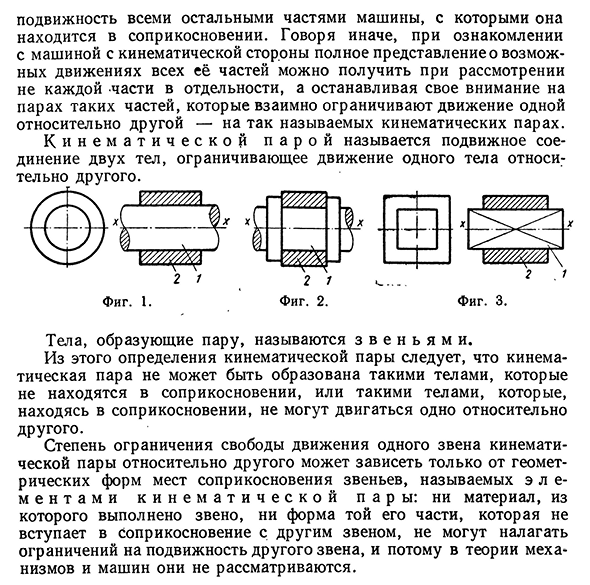
цилиндрический брус, ничем не ограниченный, может совершать разнообразные движения, но если этот брус поместить внутрь полого цилиндра, как показано на фиг. 1, то брус 1 относительно полого цилиндра 2 сможет только вращаться вокруг общей оси обоих цилиндров х — хи двигаться в направлении, совпадающем с их общей осью х — х. Если тот же цилиндрический брус, вставленный в полый цилиндр, снабдить заплечиками (фиг. 2), упирающимися в
торцовые поверхности полого цилиндра, то брус 1 относительно полого цилиндра 2 сможет только вращаться вокруг общей оси х — х обоих цилиндров. Если вместо цилиндрического бруса взять призматический брус и вставить его в полую призму (фиг. 3), то брус 1 сможет двигаться относительно полой призмы 2 только в прямолинейном направлении по оси х — х. Так как определенность движения какого-либо тела может быть достигнута только путем
- ограничения его подвижности другими телами, то при исследовании движения какой-либо части машины необходимо рассматривать ее совместно с другой частью, в большей или меньшей степени ограничивающей ее подвижность. В тех случаях, когда движение интересующей нас части машины ограничивается не одной, а двумя или несколькими частями, полное представление о возможном движении интересующей нас части мы сможем получить, приняв во внимание ограничения, налагаемые на ее8 Структурный анализ
плоских механизмов подвижность всеми остальными частями машины, с которыми она находится в соприкосновении. Говоря иначе, при ознакомлении с машиной с кинематической стороны полное представление о возможных движениях всех её частей можно получить при рассмотрении не каждой «части в отдельности, а останавливая свое внимание на парах таких частей, которые взаимно ограничивают движение одной относительно другой — на так называемых кинематических парах. К и н е м а т и ч е с к о й п а р о й называется подвижное соединение двух тел, ограничивающее движение одного тела относи; тельно другого.
Фиг. 1. Фиг. 2. Фиг. 3. Тела, образующие пару, называются з в е н ь я м и . Из этого Людмила Фирмаль
определения кинематической пары следует, что кинематическая пара не может быть образована такими телами, которые не находятся в соприкосновении, или такими телами, которые, находясь в соприкосновении, не могут двигаться одно относительно другого. Степень ограничения свободы движения одного звена кинематической пары относительно другого может зависеть только от геометрических форм мест соприкосновения звеньев, называемых э л е м е н т а м и к и н е м а т и ч е с к о й п а р ы : ни материал, из которого выполнено звено, ни форма той его части, которая не вступает в соприкосновение с другим звеном, не могут налагать ограничений на подвижность другого звена, и потому в теории механизмов и машин они не рассматриваются.
Смотрите также:
Предмет Теория Машин и Механизмов ТММ
| Фрикционная передача | Классификация кинематических пар |
| Зубчатая передача | Схематические изображения кинематических пар |
