
Оглавление:
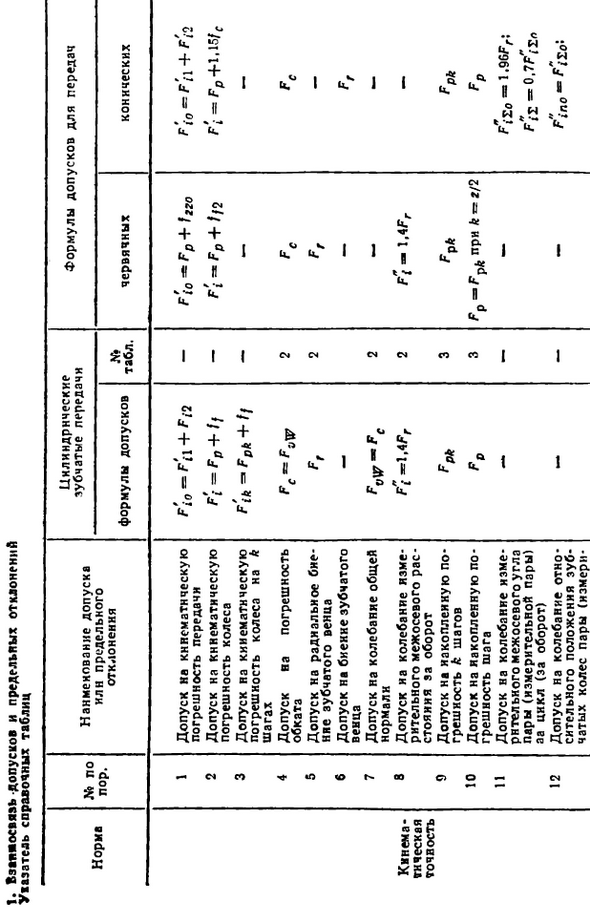

Кинематическая точность
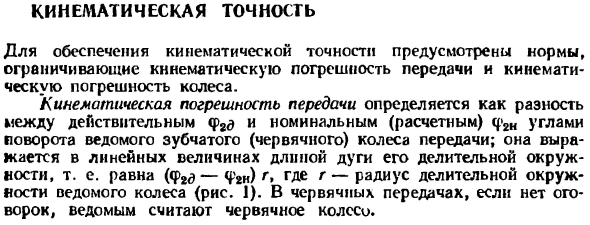
- Для обеспечения кинематической точности предусмотрены нормы для ограничения кинематических ошибок трансмиссии и кинематических ошибок колеса. Кинематическая ошибка передачи определяется как разница между фактическим pg и номинальным (расчетным) 2H углом поворота ведущей шестерни (червячного) колеса передачи. Она выражается в виде линейной величины в зависимости от длины дуги окружности основного тона.
То есть он равен (f * e-phen) L. Где G — радиус окружности шага ведущего колеса (рис. 1). Для червячной передачи. Если нет резервирования, червячное колесо считается ведомым. Кинематическая погрешность зубчатого (червячного) колеса определяется как разность между фактическим углом поворота зубчатого (червячного) колеса в работе и номинальным (расчетным) углом поворота. Ось (ось, на которой шестерня вращается в шестерне) приводится в движение измерительным колесом (червяк), а оси вращения этих колес (червячное колесо и червяк) находятся в относительных положениях относительно друг друга.
В линейных и угловых измерениях часто используется дифференциальное исчисление-на измерительное устройство влияет разность между измеряемой величиной и известными значениями, воспроизводимыми измеряемой величиной. Людмила Фирмаль
Он выражается в линейном выражении длиной дуги окружности основного тона. При назначении требований к точности колеса относительно другой оси (например, Ошибка колеса другая). Это необходимо учитывать при определении точности передачи.
При использовании в качестве основы для измерения поверхности Отклонения по форме и положению относительно рабочей оси вращения, последние следует учитывать при выборе подходящих допусков или их компенсации путем уменьшения допусков на изготовление Показателем кинематической точности передачи является максимальная ошибка передачи движения p 1ag, которая равна максимальной алгебраической разности в значении ошибки движения передача Для полного цикла изменения относительного положения редуктора (рис. 2, а).
Когда большая шестерня (червячное колесо) вращается на угол pg, равный следующему частному, происходит полный цикл. Разделите число маленьких зубьев колеса (вращение червяка) r1 на наибольший общий делитель x зубьев r и ha (вращение). (1) Например, r (= 40, rg = 60, x = 20, pa = 2l = 4l. Максимальная ошибка передачи движения ограничена допуском P 1v. Стандарт не дается. Для цилиндрических и гипоидных зубчатых колес ее можно определить как сумму допусков наибольшей кинематической погрешности колеса и зубчатого колеса.
Червячная передача — как сумма допустимой погрешности накопленной погрешности шага колеса и допустимой погрешности циклической погрешности частоты зубчатой передачи в зависимости от степени точности движения Передача по степени гладкости (Таблица 1, № I). В случае конических зубчатых колес и гипоидных зубчатых колес, состоящих из цилиндрических зубчатых колес и колес с несколькими зубьями и соотношением 3 или менее, допустимый диапазон выборочной сборки Расчет на основе передачи может быть уменьшен более чем на 25%.
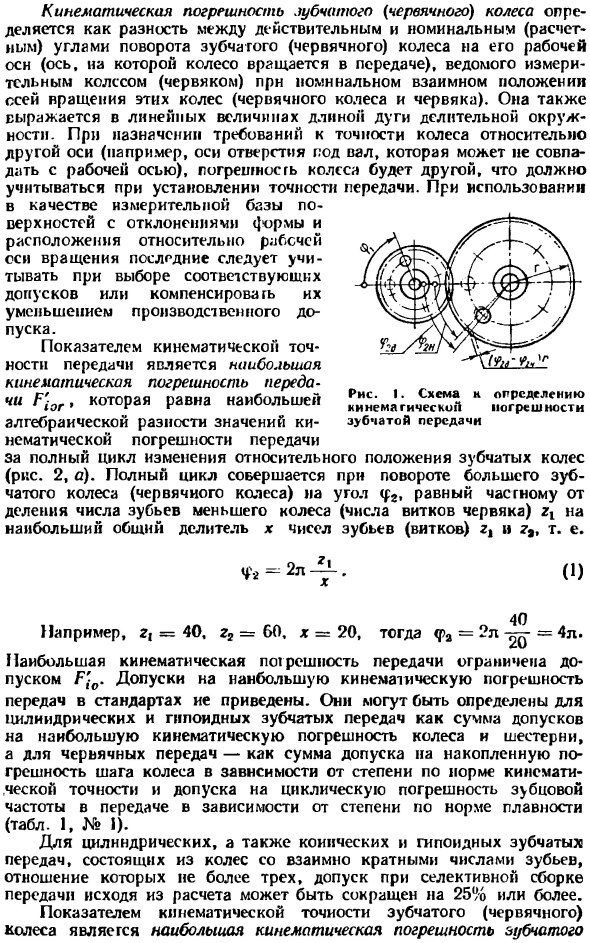
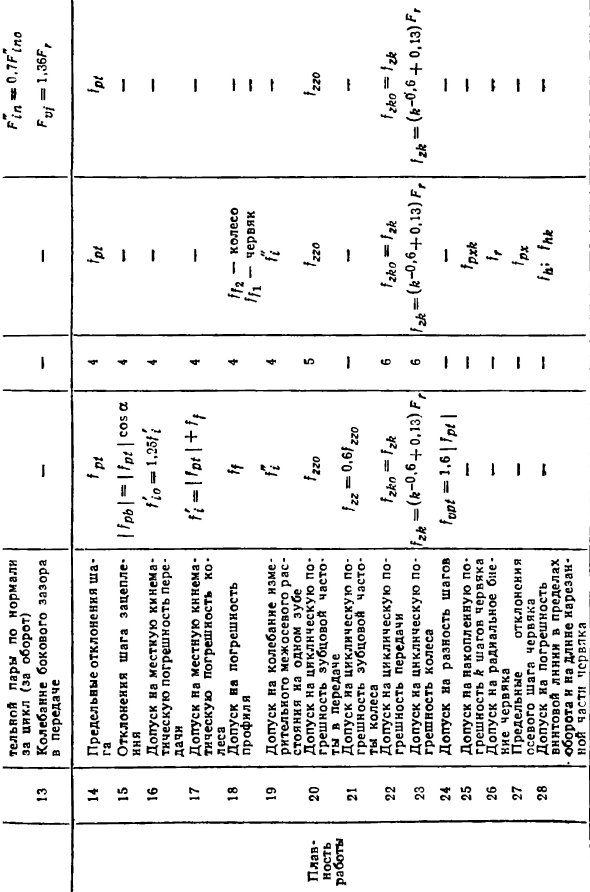
Кинематическая точность зубчатого (червячного) колеса является самой большой кинематической погрешностью зубчатого колеса (Червячное) колесо r 1g, которое равно максимальному алгебраическому изменению кинематической погрешности зубчатого (червячного) колеса за один полный оборот (рис. 2, б). P (g — сложная касательная ошибка колеса. Ошибка G — ограничена допустимым отклонением максимальной ошибки колеса. По умолчанию ее значение не указано.
Для цилиндрических зубчатых колес и червячных колес, в зависимости от степени в соответствии с кинематической точностью и критериями допуска, определяется как сумма допусков совокупной погрешности шагов вдоль колеса В зависимости от степени точности по критерию гладкости, а также от погрешности заданного профиля конического и гипоидного колес — в виде суммы C) Рисунок 2.
График кинематической ошибки: a-gear трансмиссия; b-gear (Характеристики графика Допуск на кумулятивную погрешность шага, основанный на критериях кинематической точности и допуск 1,15 на погрешность качения частоты зубьев (Таблица 1, № 2). Может нормализовать кинематику Цилиндрическая передача и погрешность шага -p 11) g, можно определить допуск P k (Таблица 1, № 3). Кинематическая точность всех типов трансмиссий зависит от следующих ошибок в параметрах зубчатого (червячного) колеса. Накопленная ошибка до шага, Накопленная ошибка до шага, Ошибка прикатки.
Кроме того, компоненты кинематической ошибки в зависимости от типа передачи следующие. Для цилиндрических зубчатых колес — обычная вибрация нормальной длины, Цилиндрические и червячные передачи — радиальное биение зубьев шестерни, измеренное межосевое расстояние на один оборот колеса и биение конических и гипоидных передач Зубчатое колесо, вибрация угла между осями измерения пары (измерительная пара), изменение относительного положения шестерни — пара колес (измерительная пара), изменение бокового зазора Суровая. Точность накопления t k шаг Rrg-k = ( — * *) .
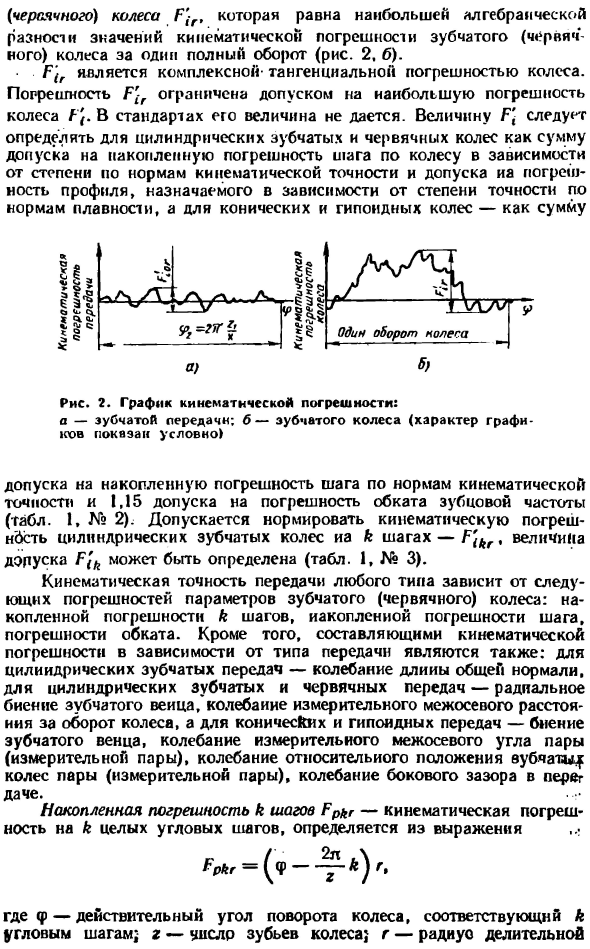
Где f — фактический угол поворота колеса, соответствующий шагу угла. g — количество зубьев на колесе. сплит-радио От 2 до г 2 (рисунок 3). Представляет Ep. неправильность Окружность k — это число целочисленных угловых шагов от 2 до г 2. K — номинальный угол поворота колеса. Совокупная погрешность на шаге Gr * при отсутствии особых требований присваивается длине дуги, соответствующей g 6 или ближайшему целому числу.
- Накопленная погрешность шага зубчатого (червячного) колеса. Ер — это максимальная алгебраическая разница значений накопленной погрешности, найденная для всех значений до Совокупная погрешность Погрешность Gr для червячных и конических колес не указана в стандарте. Они равны допуску Ep, соответствующему k = -y или целому целому числу (Таблица 1, № 10). Значение суммарной погрешности шага Gr в большинстве случаев составляет 70-80% максимальной величины кинематической погрешности колеса G -g.
Суммарная ошибка шага Колеса Grg формируются в основном из-за эксцентриситета крепления и ошибок качения зубчатых (червячных) колес. Погрешность обкатки ПГ является неотъемлемой частью кинематической погрешности зубчатого (червячного) колеса и определяется его вращением и технической осью, за исключением периодичности. Ошибка, кратная частоте зуба и более высокой частоте. Под технологией понимают ось колеса, которая вращается во время окончательной обработки зубов По обе стороны от них.
В результате в угловые координаты некоторых звезд, полученные при измерении, должны быть внесены так называемые релятивистские поправки. Людмила Фирмаль
Неточности в ошибках обкатки из-за неточностей в червячном колесе, приводящих к угловому вращению, обработанным колесам и рассогласованию движения Зуборезный инструмент. Таким образом, E (G можно определить как кинематическую погрешность разрезной цепи зуборезного станка, используемого для окончательной обработки зуба. Операция взлома ограничена одобрением ЕС.
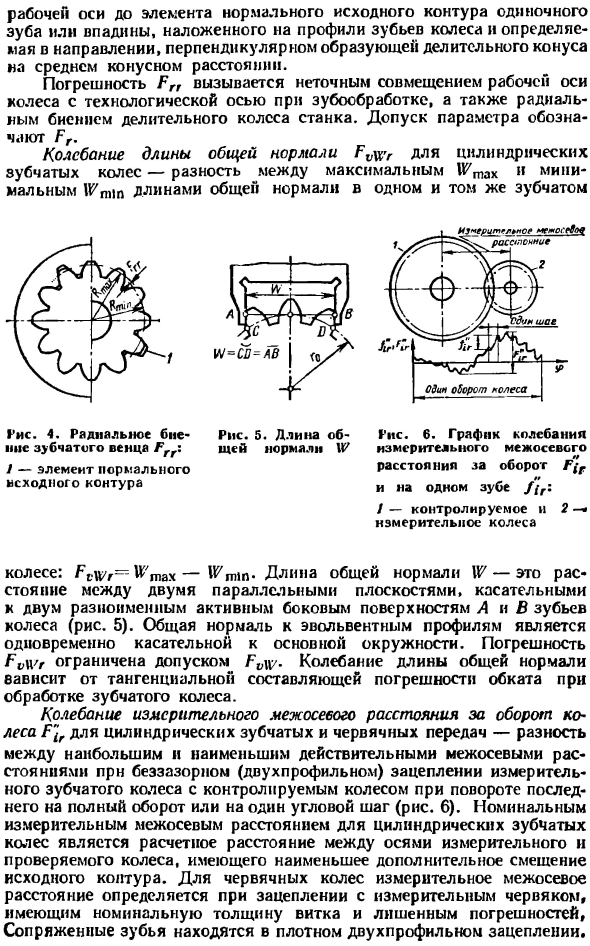
Радиальное биение зубчатого кольца E-В случае цилиндрических зубчатых колес — максимальная разница в расстоянии от рабочего вала до разделенного линейного элемента Нормальный начальный контур одного зуба или полости, условно наложенный на профиль зуба колеса (рис. 4): Для червячных колес радиальное биение обода зубчатого колеса Е является максимальной разницей между червяком и осью колеса. Раздел. Строка контактов соединяет потенциальные точки контакта на другой стороне полости.
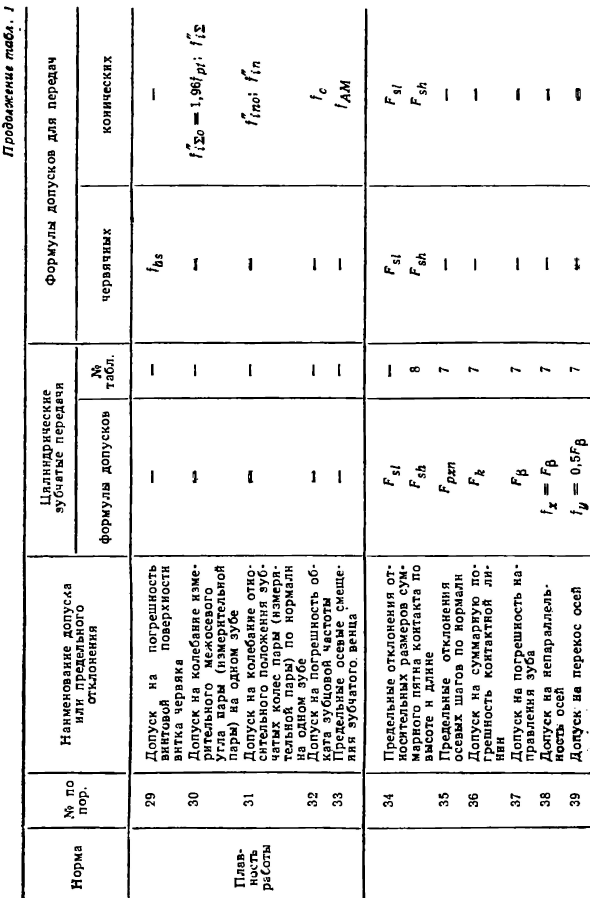
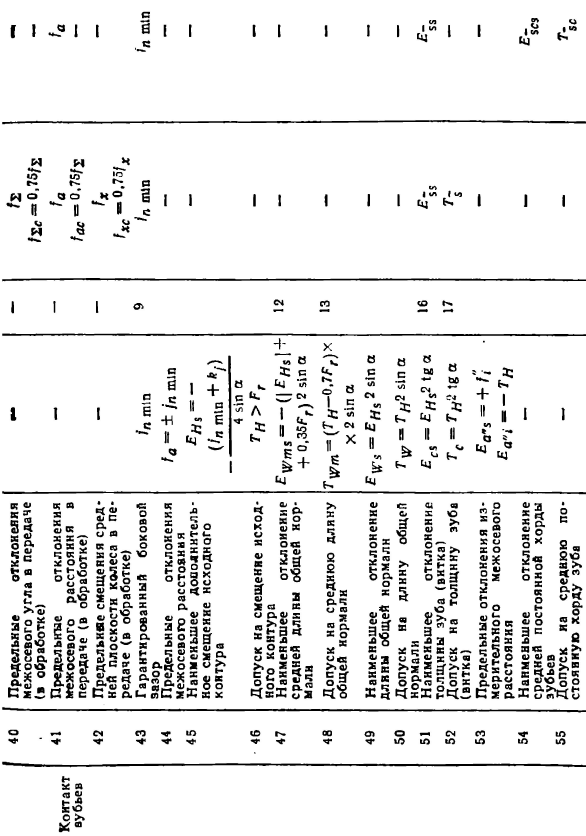
Колесо конического и гипоидного зубчатых колес Gy биение — максимальная разница в расстоянии передачи от передачи 1. Индекс допустимого отклонения и таблица предельных отклонений. Наименование допуска или предельного отклонения. Рабочая ось для нормального начального элемента контура одного зуба или полости, наложена на профиль зуба колеса и определена в направлении, перпендикулярном разделительной шине Конус на среднем расстоянии конуса.
Ошибка Рг обусловлена неточным совмещением рабочих и технических осей колеса при механической обработке зубчатых колес и радиальным биением расколотого колеса станка. Показан допуск параметра. Длина общей нормали I7 — это расстояние между двумя параллельными плоскостями в двух касательных, которые отличаются от активных сторон A и B зубьев колеса. (Рисунок 5). Общая норма для эвольвентного профиля одновременно касается основного круга. Ошибка PnP g ограничена допуском P ^. Общая нормальная длина вибрации Касательная составляющая погрешности обкатки при механической обработке зубчатых колес.
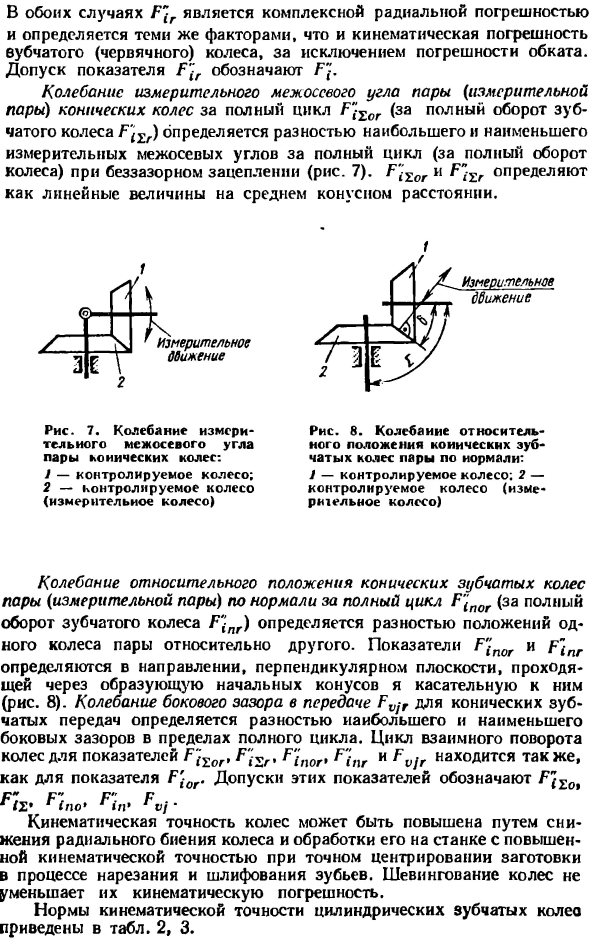
Измерение расстояния между центрами вибрации P 1 г на оборот колеса (для цилиндрических зубчатых колес и червячных передач — разница между максимальным и минимальным значениями фактического центра) Расстояние зазора без зазора (2 профиля) между измерительным колесом и колесом управления при вращении колеса управления на один полный оборот или один угловой шаг (рис. 6).
Номинальное расстояние между центрами измерения цилиндрического зубчатого колеса представляет собой расчетное расстояние между осью измерительного колеса и испытательным колесом и является наименьшим Дополнительное смещение исходного контура. В случае червячного колеса расстояние между центрами определяется при зацеплении с измерительным червяком. Поскольку ошибок нет, сетчатые зубья представляют собой плотную сетку из двух профилей.
В обоих случаях P 1g является сложной радиальной погрешностью и определяется теми же факторами, что и кинематическая погрешность зубчатого (червячного) колеса, за исключением погрешности. Бег с Допуск индекса P -r обозначен .
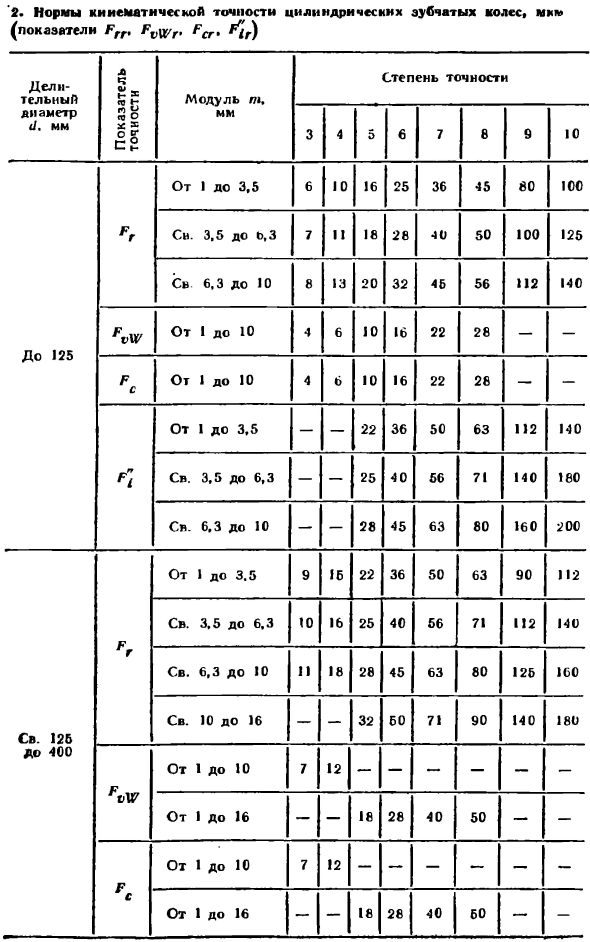
Вибрация угла оси измерения пары конических колес (измерительная пара) относительно полного цикла P ^ a (полный оборот зубчатого колеса P ^) Название Измерение более высокого угла вала в полном цикле (полный оборот колеса) с прозрачной сеткой (Рисунок 7). Определяется как линейная величина при P ^ a и средней дистанции конуса. Рисунок 8. Пара относительных колебаний колеса по нормали: 1 колесо управления.
Вибрация относительного положения пары (измерительной пары) конических зубчатых колес вдоль нормали полного цикла P 1P0G (полный оборот зубчатого колеса P -pg) определяется разностью. Относительное положение одного колеса пары к другому. Индикатор P пог и Он определяется в направлении, перпендикулярном плоскости, которая проходит через шины исходного конуса и касается их (рис. 8). Колебания поперечного зазора в передаче Pu -G в случае конуса Передача определяется разницей между максимальным и минимальным боковым зазором в течение полного цикла.
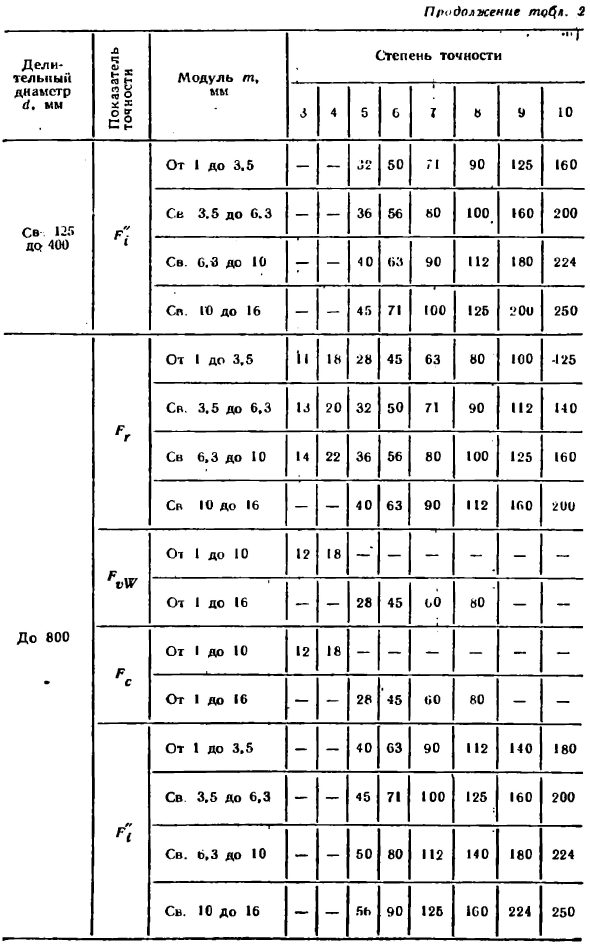
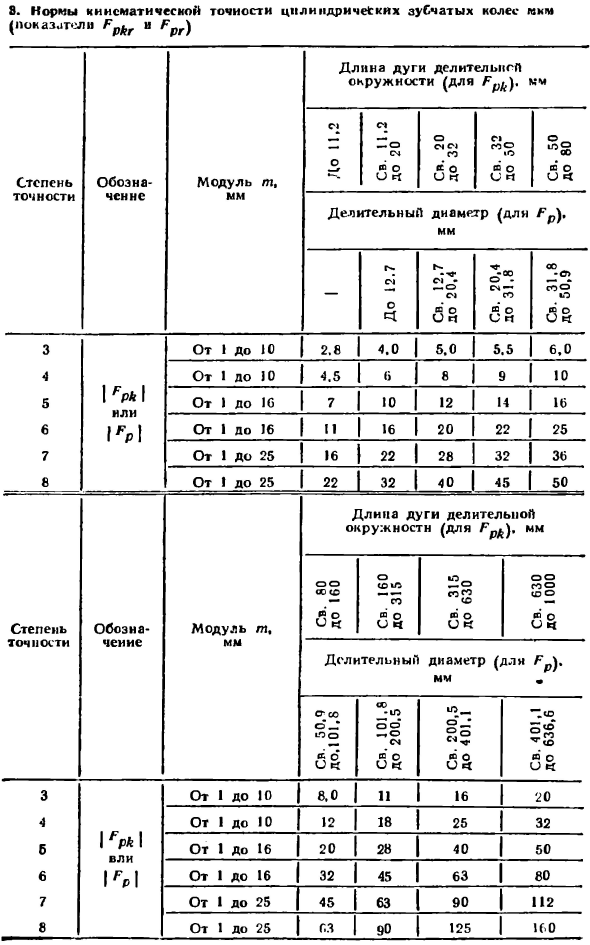
Цикл взаимного вращения колеса индикатора P ^ og P (xg ^ 1og ^ pg То же, что индикатор G -Og. Допуск по этим показателям составляет P (% 0 PPP. Rsch- Кинематическая точность колеса может быть улучшена путем уменьшения радиального биения колеса, точного центрирования заготовки и увеличения кинематической точности для станка. Процесс резки и шлифовки зубов. Колесо для бритья не уменьшает кинематических ошибок. В таблице ниже приведен стандарт кинематической точности цилиндрического зубчатого колеса. 2, 3. а.
Смотрите также:
Решение задач по метрологии с примерами
| Эксплуатационные требования к зубчатым передачам | Плавность работы |
| Системы допусков зубчатых передач | Контакт зубьев |
