
Оглавление:


Криволинейное движение тяжелого тела в сопротивляющейся среде
- Когда снаряд находится в движении, его центр тяжести перемещается так, как если бы весь вес был сосредоточен на нем, и все внешние силы, действующие на снаряд, были приложены к нему. Если мы имеем дело, 2 силы будут действовать на центр gravity. Это сопротивление среды R, которое является результатом веса снаряда и поверхностных сил давления и трения, которые передаются параллельно центру тяжести. Эти поверхностные силы, вообще говоря, могут быть уменьшены попарно с результирующей силой R, приложенной в центре тяжести.
Если форма снаряда произвольна, то о направлении движения этого состава ничего не известно, и эта сила может снять центр тяжести с вертикальной плоскости, которая высвобождается в момент t = 0.Но если снаряд сферический и не вращается, то композиция находится в вертикальных плоскостях, включая скорость центра тяжести O. благодаря симметрии орбита этой точки равна flat. To дальнейшее упрощение насколько это возможно, этот результат позволяет силе R быть направленной в противоположном направлении к скорости вокруг центра тяжести. Сила R становится возрастающей функцией скорости V. Эта сила называется R сопротивление воздуха.
Вне зависимости от того, находится ли тело в равновесии или нет, сумма работ реакций связей, которые являются здесь силами взаимодействия между точками системы, равна нулю для любого перемещения, допускаемого связями. Людмила Фирмаль
Предполагая, что сопротивление R находится на вертикальной плоскости через центр тяжести, мы можем аналитически доказать, что траектория flat. In Факт, 3 прямоугольные оси приписываются Ox, Oy и Oz, а ось Oz направлена вертикально вверх. Если представить проекцию силы R с помощью Rx, Ry, Rz, то уравнение движения выглядит следующим образом: м = р м д = РВ м а = РЗ мг Угадайте из первых 2 P х ДП ГХ Однако, поскольку вектор R предполагается прямо противоположным вектору V, проекции Rx и Ry пропорциональны производной and.
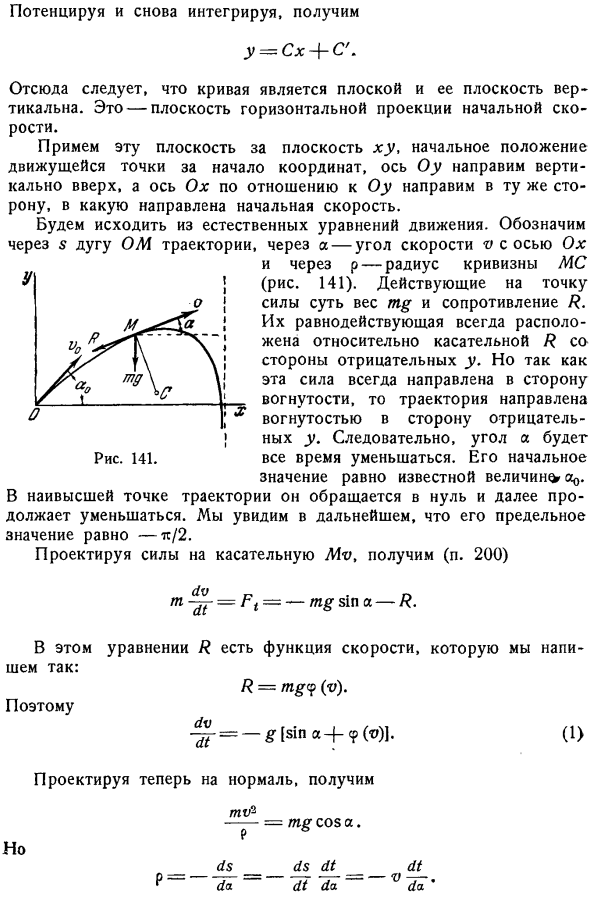
В результате предыдущая связь принимает вид: Где закрепить Д х d2y Ди ст2 dx dy dt DT снова укрепляется и консолидируется J в = СХ + с 5 по дуге Итак, кривая плоская, а ее плоскость вертикальная. Это горизонтальная плоскость начальной скорости. Возьмите эту плоскость за плоскость xy, которая является начальным положением движущейся точки в качестве начала координат, и направьте ось Oy вертикально вверх, а ось Ox относительно Oy в том же направлении, куда направлена начальная скорость. Начните с естественного уравнения движения. Ом показывает траекторию, где a угол скорости v с осью Ox, а p радиус кривизны MS рис.
Силы, действующие на точку, равны mg по весу и R по сопротивлению. Их результаты всегда совпадают с касательной R от отрицательного y. однако эта сила всегда направлена к вогнутой поверхности, поэтому траектория направлена вогнутой поверхностью к отрицательному y. таким образом, угол a всегда уменьшается. Его начальное значение равно известному значению Oq. В высшей точке локуса он исчезает, а затем продолжает уменьшаться. Позже вы увидите, что предел k 2.
Если вы проецируете силу на касательную Mv, она выглядит так пункт 200 мг Син А Р. В этом уравнении R функция скорости, которую мы пишем: Р = мг Ф в. Так… 4Р = г грех +. 1 Теперь, когда вы проецируете его на нормальный Отель мг потому что. П ДС ДТ ДТ dt da da da 9 здесь нужно использовать знак минус. Это связано с тем, что угол a уменьшается с увеличением, а p абсолютное значение радиуса кривизны. Если вы введете это значение в предыдущее уравнение, оно будет выглядеть следующим образом Дэни Гаравелли АФП Getty Изображения О = Г потому что. 2 Формулы 1 и 2 позволяют найти функции t и v. исключите из них dt и разделите его на члены. Получить уравнение дифференциальный клапан.
Вопрос в =тг на 4. В ДА 1 потому что 3 Это линейный подход equation. So, мы находим v в функции a. в = а. После этого из Формулы 2 Но… Новый Вы также можете выразить x и y в функции a с помощью quadrature. In на самом деле, есть следующие: dx = VCO adt ды = V грех в ДТ 5 Так что если вы можете найти функцию a .Тогда задача сводится к простой ортогональной.
- Выражение ДТ 1 в да потому что г когда вы определяете dt, если a больше, чем mc 2, pro dt. Оригинал отрицателен, он уменьшается, а время действительно увеличивается. то же самое относится и к X, потому что дх = vcosa ДТ. что касается y, то он сначала увеличивается, пока a не достигнет значения a = 0, затем знак меняется, затем y уменьшается и точка движения decreases. To найти значения x, y t, соответствующие самой высокой точке, нужно установить a = 0 в Интеграле. Фотография: Joshua Roberts Getty ImagesThe уравнение y = a Полярная координата годографа скорости точки. v радиус вектор точки мешанины, а a угол, образованный осью Ox.
Если известна функция естественного уравнения, то легко найти естественное уравнение кривой. Конечно, мы нашли его И так оно и есть. П2. =Я ведь, стр. 6 1Ф П Ч г потому что Г потому что в В случае интеграла Жана Рудольфа. Если по предположению сопротивление определяется формулой, то мы будем исследовать случай во всех деталях В = А F БВН Здесь 3 константы a, b и n являются положительными. предположим, что a меньше 1.В противном случае, если тело будет выпущено без начальной скорости, его вес будет меньше сопротивления mga, и тело не упадет.
Эти шесть величин могут быть выбраны совершенно произвольно, так как твердому телу можно сообщить какое угодно перемещение. Людмила Фирмаль
Для движения задачи уравнение 3 принимает вид: ДВ л, и 4 БВН Т = тг ч 1 В Да потому что Если вы разделите обе стороны на vn n и получите его как новую переменную l vn + Л = О. Потому что Для интегрирования этого линейного уравнения Тогда мы получим ОД. =о. Потому что в ТГ 4 Хз потому что если вы выберете q так, чтобы коэффициенты p были исключены, вы получите уравнение. йд л. Пада = нтгада Вопрос че с COS х Частные интегралы признают В q n в cos a pa в tg y + J V = Потому что а тг + Дж. Для величины этого q остается обобщить уравнение для определения p.
Если мы интегрируем это уравнение в диапазоне A от da q cos a Of и обозначим значения q при a = a0 и v0 как начальную скорость, Да Вопрос потому что один Р = = с НБФ Здесь значение константы C равно и вы можете быть уверены, установив a = a0. А Назначьте здесь приведенное выше значение функции q, чтобы получить v с функцией a. затем найдите n, y, t по формулам 4 и 5. когда a уменьшается до mc 2, время увеличивается бесконечно, и y становится бесконечным, но поскольку v и x имеют определенные пределы, кривая имеет вертикальную асимптоту на конечных расстояниях, и движение становится прямым и равномерным.
Фактически, выражение, которое определяет значение после умножения q можно описать на следующем рисунке: NII Триггерной потому что если клонит г, м стремится к нулю, потому что меньше чем 1.С другой стороны, интеграция справа становится бесконечной. Терм стремится к нулю, поэтому достаточно найти предел 2 го Терма с правой стороны. Это можно описать как отношения. Он принимает форму. отношение производной по отношению к a равно nbq da cos adq Q да Или заменить на значение, вычисленное выше вопрос б Грех а а Наконец, предполагая a= , мы видим, что l vn стремится к пределу a v Интеграл уравнение 5 Но… один. если стремится к 2, оно остается конечным.
Действительно, поскольку v стремится к конечному пределу K, подынтегральное выражение остается конечным, и, следовательно, x конечен 2 U В С другой стороны Рука, T будет бесконечным для Они Два Конечно. Г Дж потому что О Склонны к специфическим Прит у как И подынтегральная функция становится бесконечностью с a= , а далее a Дело X. Поэтому этот Интеграл работает вокруг=. С XDA Джей То есть она меняется бесконечно. По той же причине формула один Г = р тг да если склонен, то увеличивается бесконечно Тэ 2.Таким образом, вышеуказанные предложения будут утверждены. Обнаруженный предел скорости X является корнем уравнения, как и в случае линейного движения вниз =.
Обратите внимание в некоторых конкретных случаях, если желательно выполнить квадратуру или хотя бы вычислить значения v, x, y, t вблизи a= , потому что а = 2а 1 4 А2 Переменная u изначально положительна, и если a = 0, то она равна 1, а если a—m 2, то равна нулю. формат значения q: 2nan na 2 1 + А2 Н 1 + 2г Где A меньше 1, поэтому показатель L положителен. Формула вопрос 1 2pip 1 + 2 n ООН Р Л С если n целое число, то можно выполнить ортогональное. Эту формулу легко разобрать. Обратите внимание на Интеграл уравнения 3.Если мы можем определить v функции a из выражения 3, мы видим, что задача может быть сведена к квадратуре.
Поэтому интересно изучить это уравнение, чтобы показать случай интегрируемости. Ciacci сделал это в 2 статьях Sot ptes Rendus, а именно CXXlP и CXXXI11, 1901.С другой стороны, чтобы выполнить интеграцию, можно использовать назначение для приведения выражения 3 в грех а j в = Дж К уравнению = в С в 1 2 п у 4 Вы в з То есть показать =+4 c2z 4 s3 Исследование многих авторов Roger Liouville, Comptes Rendus, September 6, 1886 Appel, Sur les invariants de quelques Equationsdifenten tielles, Journal de Jordan, t. 5, 1891 Pennel, Annales de l Ecole Normale sup rieure, vol. VIII, 1891 Эллиот, там же. Том.
Смотрите также:
Решение задач по теоретической механике
