
Оглавление:

Малые колебания системы с двумя степенями свободы (результаты для общего случая)
- Дифференциальное уравнение для малых колебаний системы с двумя степенями свободы можно получить из уравнения Лагранжа: d dT dT_p. d dT dT „dt dqt Sqt dt dq2 Bq2 (56) Каждая из обобщенных сил в общем случае состоит из трех сил. Обобщенная сила от потенциальной силы Q «, сила сопротивления Q *, возмущение Qf. Для систем, близких к устойчивому равновесию, ряд кинетических и Потенциальная энергия и диссипативная функция. Кинетическая энергия кинетической энергетической системы рассчитывается как. Для систем с двумя степенями свободы: статические, идеальные, голономные. Для несвободной связи радиус-вектор каждой точки rk является функцией только обобщенных координат qt и q2.
Движение системы, обобщенные координаты q и q2 зависят от времени. Таким образом, дифференциация времени Подставляя в кинетическую энергию представление радиус-вектора, 22 _ Л] зависит только от q и h, а не от q, h q2. Расширьте каждую из этих функций степенным рядом qt и q2. Принимая q в положении равновесия, вблизи положения равновесия = q2 = §. Здесь и далее индекс Lp 0 \ 1 = 22 = -Показывает, что эти величины должны быть рассчитаны. Такое же разложение может быть получено для A12 и A22. Я представлю Спецификация: vs = (l) o; «12 = (-412); ^ 22 = (A22).
Тело будет тогда вращаться вокруг неподвижной оси, а именно, оси цапфы. Его центр тяжести будет неподвижным, и поэтому сумма проекций внешних сил на любое направление будет равна нулю. Людмила Фирмаль
Постоянные значения vp, a12, a22 называются коэффициентами Системная инерция. Откажитесь от 3-го и более высоких членов за q. q2, qt, q2, получить Следующее уравнение для кинетической энергии имеет вид T = 72 (a ,, q? + 2a, 2 q, q2 + a22q 22). (57) Однородный вторичный Формат двух переменных x и x2 является выражением вида F = B11xJ + 2B12xIx2 + S22xl. Vi, B12, B22 являются постоянными Количество, которое не все ноль. Квадратичная форма, которая принимает в поле только положительные значения Переменные x1 и x2 изменяются и равны нулю только при нулевом значении переменной. Определенно положительный.
Игнорирование третьего и более высоких членов, кинетическая энергия Системы вблизи положения равновесия будут иметь однородную квадратичную форму с обобщенной скоростью q2. с того времени Кинетическая энергия всегда положительна и равна нулю только при обобщенном нулевом значении скорости. Обобщенная скорость четко выражена в положительной квадратичной форме вблизи положения равновесия системы. Фактор необходим и достаточен для того, чтобы квадратичная форма F была положительной. Условие I, 1> 0 выполнено. B22> 0; Sn B22-B2i2 = | J11 J’2 |> 0. (58) Получите эти условия. делает F — полностью положительная квадратичная форма. Далее, если F> 0 для x2 = 0, x, # 0, Blt> 0. Аналогично из условия Если F> 0 равно x2 # 0 и x = 0, то B22> 0. Это необходимые условия для определенных положительных квадратичных форм.
Однако из-за того, что B12 достаточно велик, F может быть отрицательным, поэтому их недостаточно. Отрицательное значение. Если в рассматриваемой области x2 преобразовать квадратичную форму, введя переменную x = Xj / x2 Это не ноль. В противном случае вы можете поменять местами x и x2. Вторичная форма F принимает форму: F = x% (Blix2 + 2Bl2x + B22). Необходимо, чтобы F был положительным везде в рассматриваемой области значений x Квадратичное уравнение Vih2 + 2B12x + B22 = 0 не имеет действительного корня, то есть параболы y = BllX2 достаточно + 2Bi2x + B22 (Ви> 0 и В22> 0) были идеально расположены над горизонтальной осью. По этой причине квадрат дискриминанта Уравнение отрицательное, то есть в? 2-viv22 должно быть o Условие (58) доказано. С Кинетическим Энергия, близкая к равновесной, четко выражена в положительной квадратичной форме. Коэффициент должен соответствовать условию (58).
Следовательно, для a, a12 и a22 для любого конечного числа систем Кинетическая энергия с n степенями свободы вблизи положения равновесия выражается в равномерной квадратичной форме. 7 ‘= 72 (aii9i + ai29i? 2 + «2i9z? I +» 2292 + — + aB „? N2). Конкретными положительными условиями являются: Потенциальная энергия системы с двумя степенями свободы зависит только от обобщенных координат q и q2. Силовое поле и связь стационарны. Разложение потенциальной энергии P вблизи положения равновесия qi = q2 = 0 Степенные ряды qt и q2, H (91.4i} = {n) o + ^ ni5q ^ Qq ^ (5ni8q2) oq2 ^ (d1nidq}) () q2il2 + + [82ni (dqldq2) \ oqlq1 + (d2n / dq}) oqll2 + …. Потенциальная энергия (Л) о в положении равновесия равна нулю. Величина (r / 7/5 ^)) o = 0, (577/5 ^ 2) o = 0 как обобщенная величина силы в положении равновесия системы. в конце концов.
Если условие члена второго порядка поддерживается и условие члена третьего или более высокого порядка игнорируется, потенциальная энергия ^ = * / 2 (С1191 + 2с1291? 2 + С2292) (60) постоянное значение cn = (d2I7 / dq2) 0; c, 2 = (d2n / (dql8q2)] 0; c22 = (d2 / 7 / dql) 0 называется коэффициентом жесткости. Потенциальная энергия с приемлемой точностью однородна Квадратичная форма обобщенных координат qY и q2. Когда потенциальная энергия находится в равновесии Минимальное значение, то есть положение равновесия является стабильным, коэффициенты разложения cn, c12, c22 являются вторыми Производная П по минимуму qt и q2 должна удовлетворять условию. (58) Конкретная положительная вторичная форма P.
Таким образом, Точность выражается в четкой положительной квадратичной форме вблизи минимума в 0. Вблизи устойчивой системы равновесия. Потенциальная энергия для n степеней свободы Формат n = ll2 (ctlq2l + Ci2qiq2 + c2i424i + c22 <12 + — + ^ „4 ^). Конкретные положительные условия Это полностью аналогично условиям коэффициента жесткости и коэффициента инерции. Диссипативная функция Пусть на Точка системы представляет собой линейную силу сопротивления Rk, пропорциональную скорости точки vk. То есть ^ k = — ^ k = -kkkk, где C * — постоянный коэффициент сопротивления. Обобщенная сила Qi от силы сопротивления, с обобщенным определением силы Если мы используем то, что было издано в секундах, сила. 6 тождеств Лагранжа 8rkldqk = drkldqk, которые можно выразить здесь Φ = £ 5- ^ = £ -y — функция диссипации. Точно 0?
Выражается как Q% = -S . Где E = T + P — полная механическая энергия системы. Вот так Диссипативная функция в общем случае характеризует скорость уменьшения общей механической энергии за счет воздействия Линейная сила сопротивления. Диссипативная функция структуры аналогична кинетической энергии, Содержит коэффициент сопротивления u вместо массы mk Как и в случае с кинетической энергией, если отбрасывать слагаемые третьего и более высоких слагаемых, получим = ‘/ г (Рп91 + 2ни2? Постоянное значение I 0. q22> 0; О Ts11R22-I12>. для В системе с n степенями свободы функция диссипации имеет вид = ‘1г (Ии? 1 + Н12? 142 + Н21? 291 + Н2242 + • + RL119L).
Данный коэффициент сопротивления соответствует условию, которое полностью аналогично следующему условию: Коэффициент инерции. Дифференциальное уравнение собственных колебаний Для системы с двумя степенями свободы Он движется только под действием потенциала и получает формулу для кинетической энергии и потенциальной энергии (57) (60), Qi = Q «= ~ (cn9i + <) = интеграция с 0 дифференциальными уравнениями. Решение системы уравнений частоты Уравнение (63) должно быть найдено в виде qi = Cleu, q2 = C2eu. Но для небольших колебаний вблизи стабильности Положения равновесия могут быть решены, потому что все значения k, которые легко проверить, являются чисто мнимыми. Qt = A {sin (£ z + a); q2 = Arsin (kt + a), (64) где постоянная k — круговая частота вибрации. Как доказано ниже Это реальная ценность.
Определите константы At, A2, k и a. Количество A и Ag называются Амплитуда, а — начальная фаза. Рассчитайте производную: = -Atk2 sin (Ar + a), q2— -A2k1sin (kt + a). Замени их Значения Q и q2 из (64) в систему уравнений (63). грех (постоянный коэффициент ftr + а) Должен быть равен нулю. Это дает систему из двух однородных линейных уравнений для определения амплитуд At и L2. Л1 (с11-а1Л2) + Л2 (с12-а12’И == 0; | ЛДс12-Д12 * 2) -М2 (е22-а22Л2) = 0.} (65) Линейное однородное уравнение имеет вид Ненулевое решение, когда системный определитель равен нулю: Откройте определитель и получите частотное уравнение: (C11 — a1L2) (C22〜a22 ^ 2) — (C12 “a12 ^ 2) 2 = ® — (^ 6) Только для значений k, которые удовлетворяют частотному уравнению Ненулевое значение A, Ar и, следовательно, 9i> 9r — обычно частотное уравнение в виде биквадратичного уравнения Случай имеет два значения для квадратной частоты k2.
Для систем с 2 степенями свободы, для квадратичной формы Поскольку кинетическая энергия и потенциальная энергия удовлетворяют определенным положительным (59) и (61) условиям, Условия необходимы и достаточны для того, чтобы оба решения К2 были реалистичными и позитивными. только Действительные и положительные значения k2, обобщенные координаты и q2 Время. Для значений k2, которые не удовлетворяют этим условиям, движение системы не является колебательным. Капля Отрицательное значение частоты. новый Это не дает хорошего решения и не имеет физического смысла, поэтому получаются две частоты. Минимальная частота указана как k „большая — k2. Частоты kx и k2 являются собственными частотами системы. Он зависит от начальных условий и полностью определяется значениями коэффициентов инерции и жесткости. исследование Уравнение частоты.
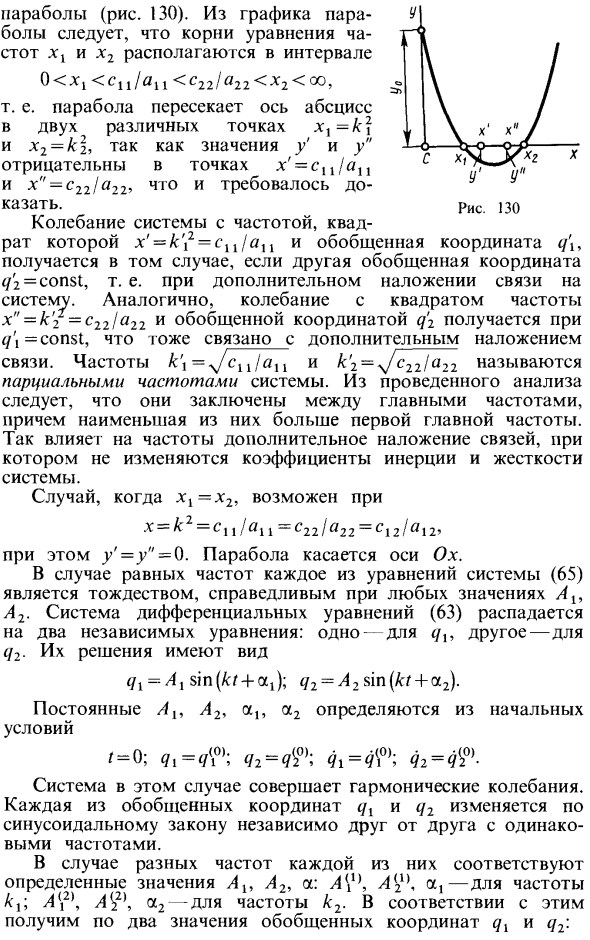
Функция V = (ci 1-a11 *) (c22-a22x) — (c, 2-a12x) 2, (67) где x = k2. Формула (67) Это параболическое уравнение. Корни частотных уравнений k2 и k2 соответствуют пересечению абсциссы и параболы. х (и х2, потому что квадратичная форма кинетической энергии и потенциальной энергии явно положительна, Коэффициенты инерции и жесткости удовлетворяют условиям (59) и (61), то есть «11> 0», 22> 0, «22-» 12> 0. (59 ‘) cn> 0, с22> 0, ССС22 — с2г> 0. (6G) Уточните, что cu / atl O; x = x ‘= ^> o, y = Y = — ^ C12- «12 ^ <°; .VX — St> о., ■ -y — (<•, — <®. Термин был помещен в (67) Если вы уменьшите мощность x, y = ((ilia22-’ll2) x2- (ciia22 + c22aii + 2ct2at2) x + ciic22-cl2 (67 ‘) a22 из aca22-x2 положительно, y-> + oo, если x-> oo. На основании полученных данных создайте график U U. 130 парабола (Рисунок 130).
Из графика параболы видно, что корни частотных уравнений x и x2 находятся в диапазоне 0 , A $ \ a2— Частота k2. В соответствии с этим мы получаем два значения обобщенных координат qt и q2. Г. В. ^ ^ V´s ^^ + a,); dU ‘= LU, yn (A: 1g + a1);’ 1 qf ‘= A i2’ sin (k2t + a2); q’2} = A ‘2i sin (k2t + a2); J gV *, <$ Главное качание Для частоты kL, q \ — для частоты k2. Каждое из основных колебаний является гармоническим относительно обоих обобщенных Координаты. С помощью системы однородных линейных уравнений (65) можно определить только отношение амплитуд. для Получают соотношение амплитуды первого и второго основных колебаний соответственно основных колебаний P и p2 Форм фактор. Из (68) видно, что коэффициент формы равен обобщенному координатному отношению принципала.
Вибрация: ^ = A ^ IA ^ = q ^ lq \ ‘\ ^ = A ^ / A ^^ lq \ (70) Коэффициенты формы P и p2 характеризуют главную форму Изменить. Они будут позитивными и негативными. Например, если p |> 0, η {‘и q ^} одинаковы Фаза: если Pt <0, их фазы отличаются на l. Общее решение уравнений одновременности (63) с учетом (70) имеет вид Форма 9V ’+ Я121 = АВ ‘sip 11 + ai) + А121sin (k 2t + а2);« I 2 + 2hi + «i2 (Pi + p2) + ‘| +» 22pip2] 9’i92 + (an + 2ai2p2 + a22pl) ^ 22}; 77 =, / 2 {(cii + 2c12p1 + C22p?) 9-I2 + 2 [c11 + c12 (p1 + p2) + Г1; + C22P1P2] 9 ‘<^ + (SI + 2C12P2 + C22P2) 922} -J Из сравнения Используя (73) и (74), условия a’12 = 0, 12 = 0, 1 + <-. А (Р, + Р2) + ^ 22Р, Р2 «<> — I и новая формула подключения Старый коэффициент инерции и жесткость a’i = aii + 2a12P, + a22Pi, a * 22 = ac + 2 «12₽2 + 0», 22> 0-cn> 0, c22> 0. С,. > 0, Н22> 0, ЦЦ22-Ц12> 0- (86) Основное использование.
Координаты не разрешают одновременные уравнения в независимые уравнения, Несколько легко. Решение системы (85) можно найти в виде 01 = C ^; 02 = С2Л (87) Присвоение к системе (87) Сокращение по уравнению (85) и e ”, C1 (a11V + fi11X + c11) + C2p12X = 0;) С ,,! 2 X + C2 (a22 X2 + q22 X + c22) = 0 J Так что это однородная система линейных уравнений о неизвестных С1. С2 имел ненулевое решение. Определитель этой системы равен нулю: I apX2 + PtsX + Ss p12X | «| I12X a22X2 + p22X + s22 | Х характеристическое уравнение. Это квартальное уравнение. Расширенные характеристики Форма формулы: a11a22X4 + (a11P22 + a22I11) ^ 3 + (<, 11 — 2 ++ (M11C22 + 1 * 22C11) X + CuC22 = 0. (89) Каждый из четырех маршрутов Xp X2, X3, X4 соответствует определенному значению констант C и C2. от Для уравнения (88) только связь между C и C2 определяется для каждого маршрута Xb. 2, 3, 4. (90) a22V + H22 ^ i + f22 Индекс i указывает маршрут, где используются маршрут X, константы C и C2.
Без расходов Для детального изучения возможны следующие варианты маршрута при условии (86): Характеристическое уравнение (89) и, следовательно, решение системы дифференциальных уравнений (85). 1. Корни Сложность. Коэффициент уравнения действителен и попарно сопряжен, потому что действительное число отрицательно. Детали: X1.2 = —I1 X2.z = —w2 + fc2i. Этот случай получается с низким сопротивлением. Подставляя эти значения X в (87), После простого преобразования = e- “i ‘[Zf ^ cosfc, r-1-ZJV’sinXjZj + e-” *’ [В’2) cosfc2z + + D12 ‘sin k2t] = А ‘/’ C- «» ‘sin (fc1z + aV) + L? ’E sin (k2t + ai2)); q2 = e ~ n> ‘[5V * cosк, t + Z> * 2´sin to j t] + e ~ пг’ [ZJ ^ cos k2t + + D1 / ´sin k2t] = ‘2ne’ sin (kt t + <$ ‘) + A fe to ni’ sin (k2t + a ^)). Здесь все B, D, A. а является постоянным значением.
- Каждая главная координата является суммой двух затухающих колебаний. 4 из 8 постоянных LU, A <2 \ A ^ \ Ali \ * / ´, ??, ((2´, а2´ определяются из начальных условий, остальные четыре определяются значением C {\ C $. Включить. Они могут быть выражены в виде X1.2 == Wj + fcj; X3_4 = -x2 ± X2, kt 2 = — «1 + ^ 15 X3,4 = -« 2 + fc2J. ты > ‘+ Sphe «>’) + And sin (K2t + <Д2>); q2 = e- «. ‘(С ^ 1> € * ■’ + С ^ е-к <‘) + А ^ е ~ ^ sin (* 2 / + <#>). В этом случае затухание накладывается. Исчезают колебания движения. Незначительные обобщенные координаты (72). Таким образом, в этих случаях каждая из обобщенных координат представляет собой три типа рассматриваемых линейных комбинаций. Движение. Та же самая ситуация применяется для конечного числа степеней свободы.
Нет принудительной вибрации Рассмотрим вынужденные колебания в системе с двумя степенями свободы без учета сопротивлений ниже допустимого отклонения. Влияние силы обобщения гармонических возмущений, присвоенных основным координатам. Гармоническое вмешательство Для других координат гармоническое возмущение основной координаты может быть уменьшено, если частота Начальное нарушение то же самое. Влияние возмущающих сил с разными частотами Отдельно используйте свойство суперпозиции решения линейного дифференциального уравнения.
Из этого закона следует, что для того, чтобы сдвинуть, например, кирпич, надо приложить одну и ту же силу независимо от того, какой гранью он положен на поверхность, широкой или узкой. Людмила Фирмаль
Так что для основного Координируйте qx и q2 из уравнения Лагранжа (56), чтобы получить уравнение вынужденных колебаний: 191 + Ct i9i = Hi sin (pt + 5); a22q2 + c22q2 = H2 sin (pt + 8) или после деления первого уравнения на a2b a1b, a22 9i + ^ i9i = ^ tSin (pZ + 8); 92 + 292 = A2sin (pz + 8). (91) Здесь введено обозначение констант: Λ ^ C // ac, A: 1 = s22 / квадрат a22 собственной частоты; h1 = Hl / all, h2 = H2ja22 — относительная амплитуда возмущающей силы. соответственный Системные уравнения (91) могут быть интегрированы независимо от других уравнений. Общее решение этих уравнений Теория дифференциальных уравнений представляет собой сумму общих решений уравнения без правой части (собственная вибрация).
И конкретное решение уравнения справа (вынужденная вибрация): 9i = 9ic + 9i. ; 92 = 92s + 92.-свойство Естественная вибрация qic и q2c уже учтена. Это гармонические колебания частоты k {и k2. Рассмотрим принудительную вибрацию qlB и q2B. Можно рассмотреть следующие характерные случаи. 1. Частота возмущающей силы р Не соответствует ни собственная частота kt, ни k2. Затем вы можете искать частные решения в следующих форматах: ? i «= Cisin (pt + 5); 02, = C2sin (/? Z + 8). Подставляя это в (91), получаем полученный синусоидальный коэффициент равным нулю Существует следующее уравнение для определения тождества, константа C! И C2: -C1p2 + k21Cl = hi; -C2p2 + k22C2 = h2. Отсюда C1 = L1 / (L) -p2); C2 = h2 / (k22-p2). (92) Принудительная вибрация, проходящая через основные координаты, выражается в следующем формате. 9i. = ^ Zpsin (p ‘+ 8); «2. = ^ P ^ sin (pt + 8). (93).
Если обобщенные координаты не являются доминирующими, то вынужденное колебание Согласно уравнению перехода (72) они представляют собой линейные комбинации (93). 2. Частота возмущающей силы соответствует 1 Собственная частота, например, p = kv. Это случай резонанса на этой частоте. Принудительное решение Вибрация может быть определена в виде 9lB = C1rcos (p «+ S). tf2B = C2sin (p / + 8). (94) Подставляя (94) в систему уравнений (91), Получите уравнение, определяющее константы С1 и С2. Из этих уравнений найдите C, = —L1 / (2L1); C2 = t2 / (t-p2). (95) Вынужденная вибрация главной координаты выражается в виде «,». = -5- «S If ‘+ S | — ~ sin (rt + s -1 ? 2 «= ^ ~ 2sin (^ + 5) ‘(96) Резонанс получается по одной главной координате.
Координаты, основанные на уравнении перехода (72), вызывают резонанс в обеих координатах. Если p — kx = k2, резонанс Обе основные координаты. В системе с двумя степенями свободы резонанс возникает, когда частоты совпадают. Нарушение на одной из двух частот собственных колебаний. Для системы с n появлениями Резонанс является хорошим соответствием между частотой возмущающей силы и одной из n частот естественной вибрации. влияние Линейная устойчивость к вынужденной вибрации Сопротивление не приводит к значительному упрощению системы дифференциальных уравнений, но в то же время нарушает Для симметрии рекомендуется использовать произвольные обобщенные координаты qt и q2. В этом случае упражнения и Потенциальная энергия выражается уравнениями (57) и (60), а функция диссипации — (62).
Генерализованные помехи Рассмотрим гармоники: Qi = Ht sin (p / + 8), Q2 = H2sin (pt + 8). Подставим эти значения для указанной величины в уравнение Получите следующую систему Лагранжа (56), линейное дифференциальное уравнение вынужденных колебаний. Линейное сопротивление: (aii9i + Hii? I + Cii? I) + (ai292 + Hi2? 2 + ci292) = W1sin (/ »r + 5); (97) (Ai2 ^ 1 + H12ll + fl2? L) + (a22 ^ 2 + H2292 + C2292) = H2sin (p / + 8). Решение системы уравнений для каждой координаты (97) Является ли сумма собственного движения qic, q2c и вынужденной вибрации qlB, q2 „:? I =? Ic + 9i? 2 =? 2s +? 2.- • (97 ) Зависит от корня характеристического уравнения системы однородных уравнений, полученного из Отбрасывая правую сторону, она становится линейной комбинацией затухающих колебаний и затухания.
Апериодические движения или эти движения отдельно. Рассмотрим вынужденную вибрацию g «q2». Они Конкретное решение системы уравнений (97). В этом случае 9le = B1sin (pr + 8) + n1cos (pz + 8) = / f1sin (p / + 8- £ 1);) q2 „= B2 sin (/? Z + 8) + £> 2cos (/> z + 8) = / l2sin ( pf + 8- £ 2) .J постоянная Dt, B2, D2 Соотношение Si = i4, cos £, D, = -Л, синус ;;) B2 = H2cose2, D2 = — ^ 2sin £ 2, j (9> и Заменить амплитуду At, A2 и сдвиг фазы цеe2, ,, = / / Т + + 2>; tge ^ -Dj / B ,; ‘A + tg £ 2 = -D2fB2._ (98) Уравнения одновременности (97). Получите действительное удостоверение личности в любое время. При сборе по каждой личности Для терминов, которые содержат синус и косинус отдельно, их коэффициенты должны быть равны нулю.
Обеспечивает 4 системы Уравнение для определения неизвестного Bx. B2, Dv, D2: b1 (sc- «11 / ‘2) -O1p11r + Br (s12-apr2) -1-D2p12p = H; B1P11p + >> 1 (cc-a11P2) + B2c12p + L2 (c12-a12p2) = 0; I Bl (ci2-at2p2) -Dl \ it2p + B2 (c22-a22p2) —O2c22p = Hg; Blpt2p + Dl (ci2-al2P2) + B2H22P + D2 (c22-a22p2) = 0.J Можно доказать, что это система неоднородных линейных уравнений. Никакой определитель не равен нулю для любого значения р. Решите уравнения одновременности (101), чтобы полностью определить константы B2, D2, следовательно, At, A2, £ e2. Следующий вывод можно сделать, не удовлетворяя решению одновременных уравнений (101). Влияние линейного сопротивления на вынужденную вибрацию системы двух степеней свободы.
Системный случай В одной степени свободы принудительная вибрация является гармонической вибрацией без демпфирования, Частота возмущающих сил. Они не зависят от начальных условий. При резонансе амплитуда вынужденной вибрации Он остается постоянным, а не сопротивлением. Для систем с n степенями свободы примерно Влияние линейного сопротивления на вынужденную вибрацию остается неизменным. Более сложная вибрация Система с бесконечным числом степеней свободы, например, различные типы сплошных сред. В некоторых случаях Его можно заменить с достаточной точностью системой с конечными степенями свободы. Для сплошных СМИ Дифференциальные уравнения движения являются уравнениями в частных производных, а не конечным числом систем.
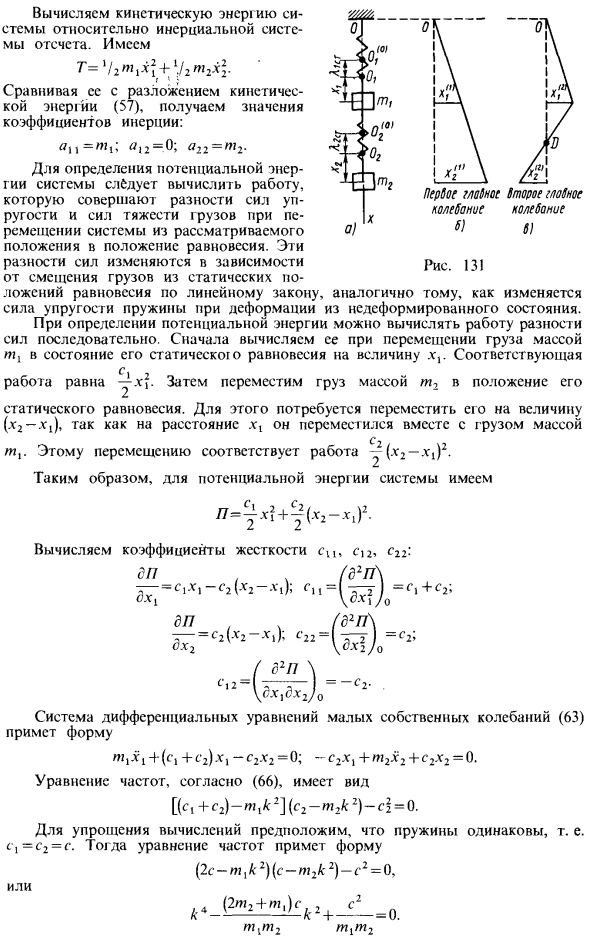
Степень свободы, в которой дифференциальные уравнения являются нормальными. Пример 1. Две массовые нагрузки т. И т2 Его можно прикрепить к пружине с коэффициентами жесткости c и c2 (рис. 131, а). Исследовать вибрацию системы. Решения. Рассматривая движение продукта только в вертикальном направлении, вы можете видеть, что система имеет две степени свободы. принимать Обобщенные координаты системы перемещения грузов .v и xg. Считается из положения о статическом равновесии товаров Вниз Это исключает гравитацию продукта из уравнения, потому что он находится в положении статического равновесия.
Сбалансировано силой пружины. Вторая стиральная вибрация разности сил зависит от смещения Нагрузка из положения статического равновесия по линейному закону и сила упругой пружины изменяются одинаково. Деформация из недеформированного состояния. Можно рассчитать разницу работы при определении потенциальной энергии Власть последовательно. Сначала вычислите ce при перемещении груза массой m в состояние статического равновесия. Значение х. Соответствующая работа равна yx2. Затем переместите груз с массой tg в его положение равновесия. Для этого Надо двигаться на расстояние х. Перемещено с грузом массы ш.
К этому Движение соответствует работе y (x2 — xj2. Поэтому о потенциальной энергии системы, Коэффициенты ^ ^ — ^ X.-Cj -’- (Sb = (Sb-система является производной, форма малых собственных значений Форма частотного уравнения из-за вибрации (63) (66) имеет вид: Чтобы упростить расчет, То же самое = c2 = s. Тогда частотное уравнение принимает вид (2с-т, Л2) (с-т2Л2) -с2 = 0. Решение: как решения, так и При положительном значении Wr / m> 0 ожидалось, что оно будет больше по сравнению с массой m2, & 1 = 0; кг = y / s1tg, то есть нагрузка массы t не вибрирует, а нагрузка массы t2 изменяется, как если бы она колебалась.
Он прикреплен к неподвижному корпусу одной пружиной. Предположим, что масса t2 бесконечно велика по сравнению с t. У нас есть kt = 0. k2 = .j2clm2. В этом случае нагрузка с массой не колебалась, а нагрузка с массой вибрировала Он прикреплен к неподвижному корпусу с помощью двух пружин. Рассмотрим случай, когда новая вибрация принимает следующую форму: tx1 + 2cx1-cx2 = Уравнения частоты выражаются в виде (2c-tk2) (c-tk1) -c2 = 0 соответственно. t2k4 — Ztsk2 + c2 = 0. Из частотного уравнения определите квадрат частоты основной вибрации. Для коэффициентов коэффициентов, Согласно (69) первое основное колебание частоты A состоит из x \ «и xy ^ pjxV». р,> 0, так Первая основная вибрация смешения xV и x $? Признак тот же, и вибрация продукта находится в фазе. во-вторых Вибрация на частоте k2 включает смещение x’21 и xy ‘= p2x’i.
Поскольку p2 <0, x \ 2 ‘и xS2’ противоположны. Колеблющийся груз меняется, но основные формы вибрации показаны на рисунке. Переместить груз с большой вибрацией Правый горизонтальный левый-отрицательный. Отложить расстояние продукта вертикально от вершины первого продукта Паки. В случае первой основной вибрации смещение первой нагрузки представлено горизонтальной линией xV. водоизмещение Второй нагрузочный горизонтальный сегмент xS «(рисунок 131.6). Оба сегмента направлены вправо, поэтому они имеют одинаковый знак, Например, положительный. Второй основной сегмент вибрации х (21 смещен х) Если 21 положительно, х? Поскольку 1 становится отрицательным, x’j21 должен быть размещен с левой стороны (рис. 131, в).
Тогда D пружины Вторая основная вибрация всегда стационарна. Такая точка называется узлом. Второй большой свинг Есть один узел. Первой серьезной вибрации узла нет. Пример 2. Опишите, используя условие Примера 1 Эффект демпфирования вынужденной вибрации первой нагрузки массой t2. Для этого сначала Гармоническая возмущающая сила F (t) = Hsin (pt + S) приложена к нагрузке и идет вертикально вниз. В этом случае я, р, 8 Он является постоянным. Определите условия, при которых первая партия не применяется Изменить. Решения. Левая часть дифференциального уравнения малой вибрации системы Первый пример В правой части первого уравнения вместо нуля обобщенная сила Ci = «£ ~ = f = нsin (/ «+ 8) — возмущение не применяется ко второй нагрузке, поэтому оно остается справа от второго уравнения.
Ноль. Получите следующую систему дифференциальных уравнений: Решение с принудительной вибрацией (конкретное решение) (A) Вам нужно найти t, sin (p / + 8). x2. = A2sin (pr + 8). liP2sin (pr + 8); x2, = -A 2p2 sin (pi + 8). Присвоенное значение (б) (B ‘) of (a), после сокращения амплитуды A и A1 [-t1pCh (e1 + e2)] + L2 (-e2) = H; -, L1 (-c2) + L2 (-t2p1 + c2) = 0 Из системы J (c) определите A согласно правилу Крамера. Следовательно, (б) (в) определяется Амплитуда вынужденной вибрации первой нагрузки L | = 0. если c2-W2Pr = 0. В этом случае A = -c2 # 0. Следовательно, Λ = 0, и Следовательно, если масса жесткости пружины c2 и нагрузки t2 выбрана так, чтобы условие c2 — t2p2 выполнялось, x1b = 0 Масса m и жесткость c2 являются необязательными. Вынужденная вибрация первой нагрузки полностью Погашение.
Смотрите также:
Задачи по теоретической механике
| Основы виброзащиты | Кинетическая энергия |
| Математический и физический маятники | Потенциальная энергия |
