
Оглавление:
Основные виды алгоритмов функционирования
- Основные типы функциональных алгоритмов На первом этапе разработки технологии управления фактически использовался только один тип функционального алгоритма. Для поддержания постоянного значения управляющей переменной. Долгое время этот тип системы понимали системы автоматического управления. С тех пор число типов алгоритмов увеличилось, и шесть основных типов, перечисленных ниже, могут исчерпать не только возможные типы в будущем, но и существующие алгоритмы управления.
Стабилизация. Система, которая поддерживает контролируемое количество гомеостаза, также называется системой стабилизации. Формат их функционального алгоритма: x0 (t) = const. В предыдущем параграфе мы рассмотрели пример системы автоматической стабилизации напряжения для генератора постоянного тока (рисунок 1.4). Удаление цепи с этой схемой приводит к системе стабилизации, которая работает вдоль эталонной батареи ДН, У – Д и разомкнутой цепи. Многие локально важные объекты, где высокая точность стабилизации не требуется, используют такие открытые цепи сегодня.
Вы можете, но вы не можете устранить это. , На самом деле, рассмотрим схему с простой линией линейного преобразования. Статическое уравнение такой цепи (рис. 1.2, г) имеет вид x = k0u-k2z, u = kp \ x = kp (» 0-x), (1.4) для измерения dy / dx, Dx = x2-xt и Ay ~ yY \ Используйте измерения и рассчитайте их соотношение Au / Ah w / w / dx или используйте другие методы, например методы синхронного обнаружения, известные в радиотехнике.
Известна важная особенность систем контроля отклонений: корректировки отклонений могут уменьшить ошибки при использовании регуляторов, которые выполняют обычные аналитические преобразования, то есть только элементы с аналитическими статическими свойствами. Людмила Фирмаль
Вместо технических измерений второй производной, которые трудно достичь, они почти всегда проверяют знак величины Au вблизи предполагаемого экстремального значения. Однако одну проверку можно использовать только в том случае, если экстремум существует, уникален и, как известно, не имеет точек перегиба функции в рабочей области. Если какое-либо из этих условий не выполняется, поиск становится сложным. Следовательно, если не гарантируется отсутствие точки перегиба, необходимо проверить значение Au с обеих сторон предполагаемого предельного значения в случае функции с одной переменной.
Для многих переменных функций для решения экстремальных задач используются поисковые вычислительные устройства, основанные на математических итерационных методах Гаусса-Зейделя, градиентах, наискорейшем спуске и т. Д. Поскольку прямые методы измерения dy / dx часто сложно реализовать, используются другие методы определения экстремальных значений: реле с логическими элементами для анализа символов и пошаговых схемных значений Поиск и последующие значения сравниваются. Для экстремальных (саморегулирующихся) систем, гл. 10. Если в рабочей области системы имеется несколько локальных экстремумов, то упомянутый метод может обнаружить только «экстремальный dn *», то есть тот, что находился возле исходной точки поиска.
Предмет теория автоматического управления тау
| Сущность проблемы автоматического управления | Об основных законах управления |
| Фундаментальные принципы управления | Уравнения динамики и статики. Линеаризация |
Примеры решения и задачи с методическими указаниями
| Решение задач | Лекции |
| Сборник и задачник | Учебник |
- Если у меня нет априорной информации об окружении, чтобы найти глобальный экспремш, нужно ли мне просматривать всю рабочую область и определять все локальные области? Сравните экстремальные значения друг с другом. Поскольку контрольное значение измеряется в экстремальной системе управления, оно относится к классу систем управления с обратной связью. Оптимальное управление. Принципы оптимального управления в последние годы начали применяться как к техническим системам для повышения эффективности производственных процессов, так и к системам организационного управления для улучшения деятельности экономических предприятий, организаций и отраслей.
Как правило, организационные системы заинтересованы в окончательных установившихся результатах команды без проверки их эффективности во время процесса миграции, пока не будут получены окончательные результаты команды. Обычно это объясняется тем, что в таких системах само установившееся состояние намного длиннее переходного, поэтому потери в переходном процессе очень малы и оказывают небольшое влияние на общее усиление установившегося состояния. , Однако динамика не может быть исследована из-за математических проблем.
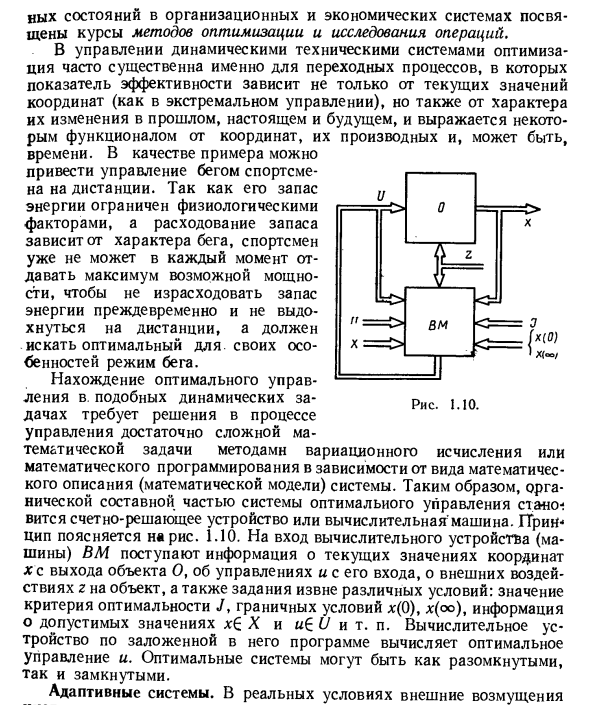
При управлении динамическими техническими системами оптимизация часто необходима для переходных явлений, и индекс эффективности представляет собой не только текущее значение координат (экстремальный контроль и т. Д.), Но также изменения в прошлом, настоящем и будущем. Также зависит от природы и представляется функцией от координат, их производных и, возможно, времени. Примером является дистанционное путешествие для спортсменов.
Метод оптимизации Государствам организационно-экономической системы посвящены курсы по методам оптимизации и операционным исследованиям. Людмила Фирмаль
Поскольку его запас энергии ограничен физиологическими факторами, а потребление энергии зависит от характера бега, спортсмен больше не может давать максимальную мощность, преждевременно истощая энергию, и далеко Не изнашивается, но вам нужно будет найти лучший. Режим выполнения функции. Чтобы найти оптимальное управление для таких динамических задач, в зависимости от типа математического описания (математической модели) системы, метод расчета вариации или математического программирования может использоваться для решения несколько сложных математических задач в процессе управления.
Нужно решить. Таким образом, органическим компонентом системы оптимального управления cia + является вычислительное устройство или компьютер. Принцип не показан на рисунке. 1.10. На вход ВМ вычислительного устройства (машины) он получает информацию о текущих координатах xc выхода объекта O, управлении и его входе, внешнем воздействии z на объект и назначении различных условий извне: оптимально Информация о значении полового критерия Y, граничных условиях x (0), x (oo), X и 6 6 U, допусках и т. Д. Вычислительное устройство рассчитывает оптимальное управление и использует программу в нем. Лучшая система либо открытая, либо закрытая. Адаптивная система.
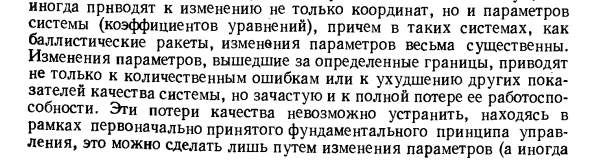
В реальных условиях беспокойство Рисунок 1.10. В дополнение к изменениям координат, изменения параметров системы (коэффициенты уравнений) и изменения в системах, таких как баллистические ракеты, также могут быть очень важными. Изменение параметров за определенной границей не только приводит к количественным ошибкам и другим показателям качества системы, но также часто приводит к полной потере работоспособности. Эти потери качества не могут быть исключены в рамках первых принятых основных принципов контроля. Это может быть сделано только путем изменения параметров И структура системы, чтобы обеспечить математическое описание системы с изменениями в исходной модели, чтобы поддерживать производительность первого принятого базового принципа управления.
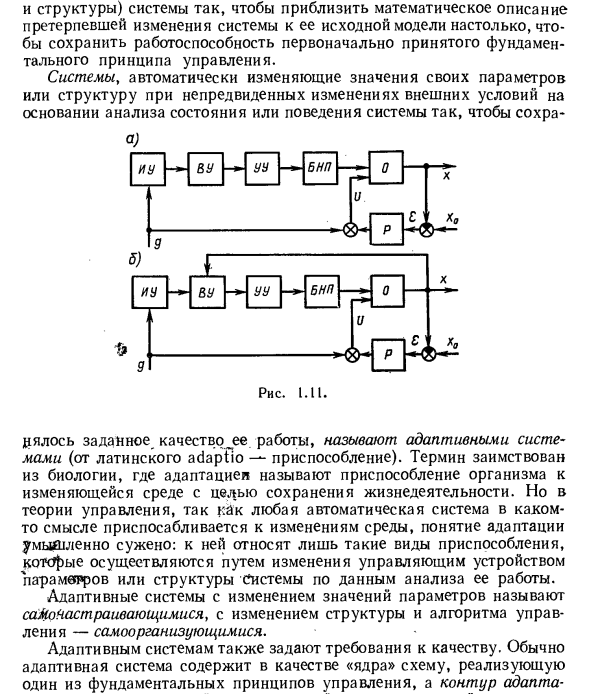
Система, которая автоматически изменяет значение параметра или структуры при неожиданных изменениях внешних условий на основе анализа состояния или поведения системы. BNP Гм В Праведный Ву L S) BNP Гм Праведный Ву В <8л Рисунок 1.11. Для оси данное качество работы ^ называется адаптационной системой (от латинского adaptio-адаптации). Этот термин заимствован из биологии. Адаптация здесь означает адаптацию к изменяющейся среде с целью поддержания жизнедеятельности. Однако в теории управления некоторые автоматические системы каким-то образом адаптируются к изменениям окружающей среды, поэтому концепция адаптации намеренно сужается: изменение параметров или структуры системы с помощью устройства управления в зависимости от анализа поведения
Относится только к типу устройства, реализованного Адаптивные системы с изменяющимися значениями параметров называются самонастраивающимися и самоорганизуются с изменениями в структуре и алгоритмах управления. Адаптивные системы также имеют требования к качеству. Адаптивные системы обычно включают в себя схему, которая реализует один из основных принципов управления, как «ядро» и адаптивную схему. Уравнение добавляется к нему как квадратичная коррекция параметров. Обычно адаптивная схема, состоящая из измерительного устройства // U, вычисляющего VU и управляющего U, может быть разомкнута, если только входное действие применено к входу (рисунок 1.11, а), или замкнута (Рисунок 1.11, б) также реагирует на вывод системы.
Саморегулирующиеся контуры работают с блоками настройки параметров BNP, которые могут быть подключены другими способами, такими как цепь обратной связи, а также подключены в последовательности, как показано. Расчет эффектов для коррекции параметров является очень сложной математической задачей, поэтому различные устройства для моделирования, расчета и решения и даже компьютеры используются как часть адаптивной системы. Способы адаптации и соответствующие схемы отличаются главным образом алгоритмами и компьютерными программами, которые их реализуют.
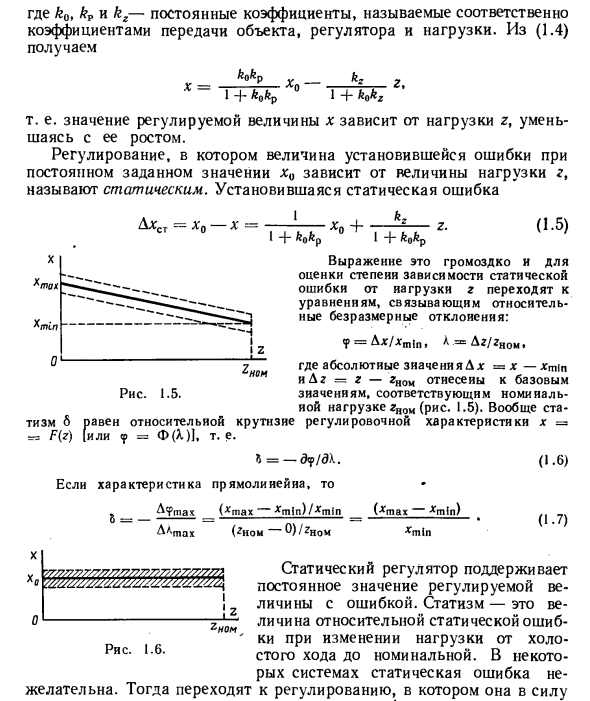
Более подробное описание системы адаптации можно найти в гл. 10. Где k0, kP и kz — постоянные коэффициенты, называемые коэффициентами объекта, регулятора и нагрузки соответственно. Из (1.4) Хо ~~ k0kp г. х = 1 + * o * z 1+ г Другими словами, значение управляющей переменной x зависит от нагрузки z и уменьшается с ее ростом. Регулирование, при котором установившееся значение ошибки при постоянном значении x0 зависит от величины нагрузки r, называется статическим. Статическая ошибка устойчивого состояния L * st = xn-x- 1 ft- (1.5) + 2. Я + мистер 1+ г Эта формула громоздка и идет к уравнению, связанному с относительным безразмерным отклонением, чтобы оценить зависимость r от статической погрешности нагрузки.
До 4 «NOM <p = A * / * min, * = Dg / гном, 0 { Где абсолютное значение Lx = x-Xmin и Lr = r составляет 1,5 от основания. Значение, соответствующее номинальному дорога gpom (рисунок 1.5). В общем случае статистика b равна относительной крутизне управляющих характеристик x = z m F (z) [или <p = Ф (Я) 1, т.е. (1.6) Если характеристики просты, * Макс * мин) / * млн (* Макс ^ мин) * мин (1.7) Al максимальная 5 = — (Последний — 0) / ЧЖОХ Статические контроллеры поддерживают постоянные значения для переменных управления, которые имеют ошибки. Статистические данные представляют собой относительные значения статической ошибки, когда нагрузка изменяется с холостого на номинальную В некоторых системах статические ошибки нежелательны.
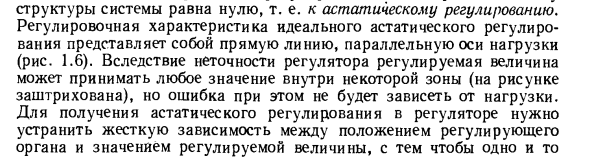
Затем перейдите к регулированию и вступите в силу там Zome Рисунок 1.6. Структура системы равна нулю. Это статическое регулирование. Идеальной характеристикой статического контроля является прямая линия, параллельная оси нагрузки (рис. 1.6). Из-за низкой точности регулятора регулируемое значение может принимать любое значение в конкретной зоне (заштриховано на рисунке), но ошибка не зависит от нагрузки. Чтобы получить статическое регулирование с помощью регулятора, необходимо устранить строгую взаимосвязь между положением регулятора и значением управляющей переменной, чтобы одно и то же значение управляющей переменной можно было поддерживать при любой нагрузке. Для этого в цепи управления была введена статическая связь.
Пример статического связывания — интеграция Уравнение а- / j j Dhs? Единицы, описанные / или du / dt = k / \ x. в о Фактически, контроллер в этом случае находится в равновесии только тогда, когда du / dt = Ax = 0, то есть когда контролируемая переменная равна указанному значению. Электродвигатель является примером статической связи. Рис. 1.4 Система, нарисованная с помощью статической тяги двигателя, перемещающей ползун вибрационного резистора, представляет собой систему статической регулировки. Управление программой.
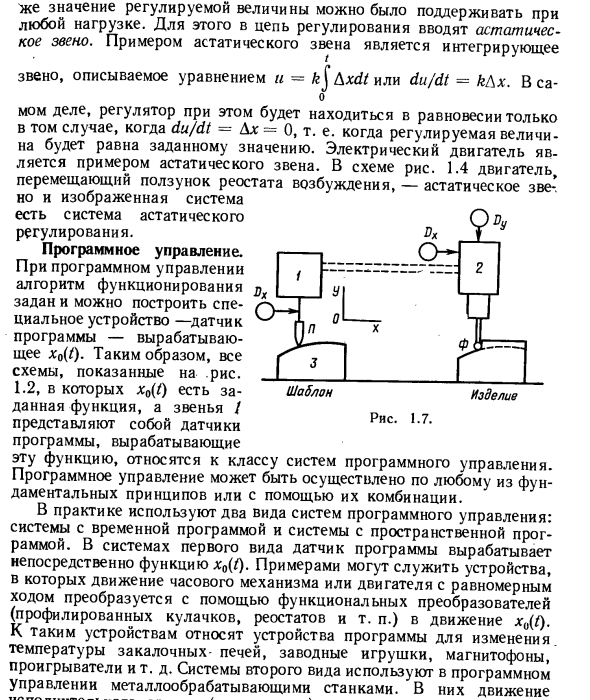
Программное управление позволяет определить функциональный алгоритм и создать специальное устройство (программный датчик) для генерации x0 ((), поэтому все схемы, показанные на рисунке 1.2, имеют значение x0 (t). Программа, которая генерирует функции и ссылки / является датчиком Эта функция относится к классу систем управления программами. Управление программой может быть выполнено в соответствии с одним из основных принципов или с использованием комбинации обоих. На практике используются два типа программных систем управления.
Система с временной программой и система с космической программой. В системе первого типа программный датчик напрямую генерирует функцию x0 ((), например, часовой механизм или движение двигателя с равномерным ходом, используя функциональные преобразователи (профиль кулачка, реостат и т. Д.) X0 (/ К таким устройствам относятся программные устройства для изменения температуры закалочных печей, часовые игрушки, магнитофоны, проигрыватели и т. Д. Вторым типом системы является металлообрабатывающий станок Используется для управления программой Нками. Их движения Dx T ■ о-9 1 секунда шаблон продукты Рисунок 1.7. Исполняемые файлы (инструменты) выполняются в соответствии с траекториями, указанными в пространстве.
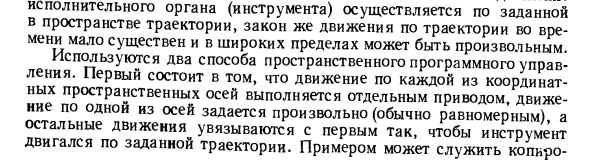
Закон движения по траектории во времени не имеет большого значения и является произвольным в широком диапазоне. Используются два метода управления пространственной программой. Во-первых, поскольку перемещение по каждой оси координатного пространства выполняется отдельным приводом, перемещение по одной из осей устанавливается произвольно (обычно равномерно), а оставшееся движение сначала связывается Инструмент должен двигаться по указанному пути. Примером является Сдвиньте в соответствии с рисунком 3 пальца вала / 7, система управления / копир 2 (рис. 1.7). Одно движение — подача по оси x двигателем Dx осуществляется равномерно, а второе движение — по оси y задается профилем кулачка (шаблон 3).
Станок 2 инструмента повторяет движение пальца //. Второй способ — описать заданную траекторию с помощью системы параметрических уравнений, параметрами которой является время, и построить решатель, который задает движение привода вдоль отдельных осей в соответствии с этими параметрическими уравнениями. , Однако система управления программным обеспечением в структуре может быть статичной и статичной. Поскольку их 2 x0 (t) и z являются нестабильными и имеют стационарные ошибки, которые зависят от скорости и более высоких производных, статические ошибки не удаляются. Чтобы устранить эти компоненты ошибок, в систему могут быть добавлены дополнительные статические ссылки (чтобы увеличить нестатический порядок). Этот вопрос будет подробно обсуждаться в 5.2. Система слежения.
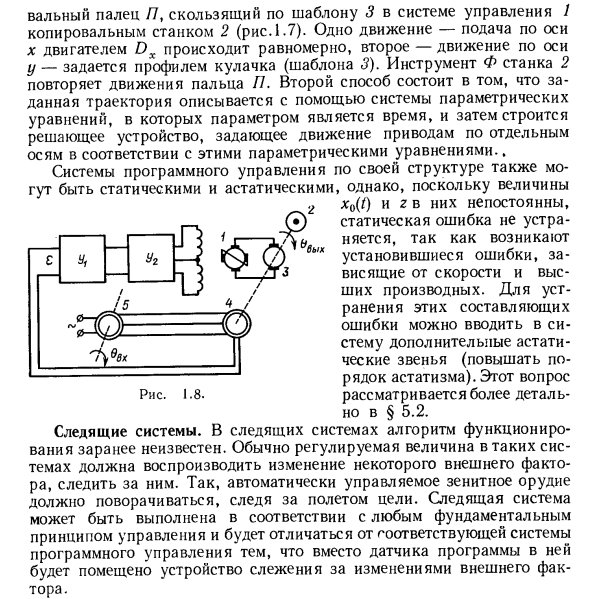
Система слежения заранее не знает, какой алгоритм работает. Обычно контрольные переменные таких систем необходимо отслеживать, воспроизводя изменения некоторых внешних факторов. В результате автоматически управляемая зенитная пушка вращается и контролирует полет цели. Системы слежения могут быть реализованы в соответствии с основными принципами управления и отличаются от соответствующих систем управления программами. Вместо программного датчика установлено устройство отслеживания изменений внешних факторов. бык Рисунок 1.8. В качестве примера, система трекинга 1.8 на фиг.1 представляет собой упрощенный вид угла обработки. Регулируемое значение — объект 2, управляемый с углом поворота 0 Вых.
Приводной двигатель 3 приводится в действие электромеханическим усилителем /. Входное движение подается на синхронный датчик 5 в виде угла поворота ротора Ovh. Тонкий датчик ячейки и тонкий приемник 4 ячейки, соединенные в цепи трансформатора, механически связаны с нагрузкой и генерируют напряжение, пропорциональное расхождению e-0VX-овых между входным валом и выходным валом системы слежения. Напряжение ошибки усиливается усилителями Y1 и Y2 и электромеханическим усилителем / и поступает на якорь привода, который вращает как объект (нагрузка) 2, так и ротор тонкого приемника ячейки, пока несоответствие не станет равным нулю.
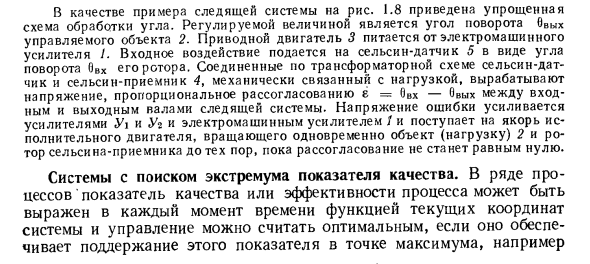
Система, которая ищет экстремальные значения показателей качества. Во многих процессах мера качества или эффективности процесса может быть выражена в каждый момент времени функцией текущих координат системы, и управление можно считать оптимальным, если оно гарантирует, что эта мера поддерживается на максимуме. вы Настройте радиостанцию на частоту передающей станции в соответствии с максимальной громкостью приема или максимальной яркостью светового индикатора. Такой контроль имеет одну неприятную функцию.
Когда точки настройки под воздействием различных возмущений смещаются от экстремальных значений, неясно, какое направление повлияет на регулятор для возврата к экстремальным значениям. Таким образом, экстремальный контроль начинается с поиска. Сначала выполняется небольшая тестовая операция в выбранном направлении, затем анализируется реакция системы на эти образцы, а затем на основе результатов анализа генерируются управляющие воздействия в форме импульсов, которые приближают систему к очень близким.
Первой ссылкой на экстремальный регулятор в литературе была статья М. Леблана (1922), описывающая регуляторы для контуров вибрации поезда, и Т. Стейн предложил идею для регулировки паровой печи в 1926 году. Четко вошел в книгу Котел, который сводит к минимуму потери дымохода. Кроме того, Y является крайним нормативным предложением. Предоставлено и изучено С. Хлебцевичем (1940) и В. В. Казакевичем (1943). Принципы экстремального регулирования стали широко известны в мировой литературе в 1950-х годах после публикации статей Дрэйпера, тылу других и Цян Сюэ-сен-сена (1954).
Рисунок 1.9 — это функциональная схема экстремального регулирования с поиском. Элементы измерения и преобразования IPE, которые измеряют координаты процесса и вычисляют индекс качества J-F (xit xg% …, xn), подключены к выходу объекта O. Тестовое устройство УПВ генерирует вит вит …, Vn тестовое действие в регуляторной системе. органическийДля поиска экстремальных значений необходим чувствительный элемент для определения экстремальных значений. Одним из способов определения экстремальных значений функции одной переменной y-f (x) является измерение частной производной dy / dx. Необходимые и достаточные условия для экстремальных значений выражаются следующим соотношением. Максимум dy / dx = 0 d2y / dx2 <0 минимальный du / dx = 0 d2y / dx2> 0
