
Оглавление:

Сложение ускорений при поступательном переносном движении
- Определяет ускорение абсолютного движения в конкретном случае поступательного движения. Общий случай сложной вины для любого переносного двнжснина будет рассмотрен в главе. 5. Для переносного движения теорема сложения Скоростей верна. Поскольку белок представляет собой движущуюся систему отсчета Oxyz, он движется медленно с относительно небольшим движением ° iX1y1z1 и с той же скоростью n Root, равной скоростью, в зависимости от постепенного перемещения растительных точек тела, соединенных с этой системой. Происходит ускорение начала координат системы координат n точки О.
Изменяя начальное условие бесконечно малым, а начальное вращение вокруг оси бесконечно близким к Оа0, породия превращается в небольшую замкнутую кривую, бесконечно близкую к вершинам малой оси. Людмила Фирмаль
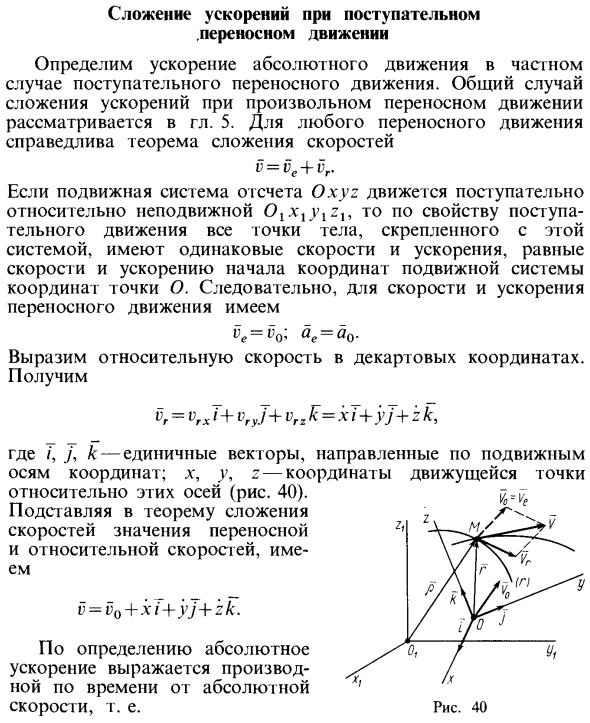
И ускорение конкретного движения у нас ve = v0; ae = a0. Относительная скорость выражается в декартовых координатах. получить Vr = ° rx ‘+ vryJ + Vrllc = xi + yj + zk, Где f, y и k — единичные векторы, ориентированные вдоль оси движения координат. x, y, z-координаты движущейся точки Одна из этих осей (рисунок 40). Портативная скорость и относительные значения скорости v = v0 + xT + yj + zk По определению, абсолютное ускорение производной по времени от абсолютной скорости времени, т.е. Рисунок 40 a = dv / dt = (d / dt) (vo + xi + yj + ‘zk).
- Кроме того, относительно фиксированной системы координат Oi ^ iyiZj необходимо учитывать изменения абсолютной скорости V и других векторов v0, i, j, k. С большей дифференциацией, a = dvo / dt + xi + yj + zk; dv0 / dt = a0 = ae, (20) Это потому, что производная по времени единичного вектора равна нулю. Если n0StepatelN0m это движение подвижной системы отсчета, ни один из по модулю или направлении не изменяется.
Это положение равновесия считается устойчивым, если начальное отклонение стержня от положения равновесия достаточно мало. Людмила Фирмаль
Использование формулы относительного ускорения в декартовых координатах ar = xG + y7 + H, Получите следующее уравнение для теоремы сложения точечного ускорения с поступательным движением. a = ae + ar, (21) То есть абсолютное ускорение точки в поступательном поступательном движении равно векторной сумме ускорения конкретного движения и относительного движения. Как правило, портативное ускорение ae и относительное ag не являются вертикальными, a = y / a ^ + a ^ + 2aearcos (ae, A ag). (21 ‘)
Смотрите также:
Задачи по теоретической механике
| Сложное движение точки | Плоское движение твердого тела |
| Сложение скоростей | Уравнения плоского движения твердого тела |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
