
Оглавление:


Твердое тело, движущееся вокруг неподвижной точки; применение триэдра, неизменно связанного с телом
- Представьте себе твердое материальное тело, движущееся вокруг неподвижной точки O. To определив положение этого тела относительно неподвижной оси oxxyxx, достаточно рассмотреть прямоугольный трехгранник O xyzt, который всегда соединен с body. В свою очередь, положение тела определяется в каждый момент положением этого трехгранного тела. То есть нам нужно знать 3 угла Эйлера 9, cf, как функцию времени.
Мгновенное вращение по угловой скорости твердого тела становится таким же, как и мгновенное вращение трехгранного тела, а его компоненты p, q, r вдоль движущейся оси Oxyz определяются по приведенной выше формуле 2.Здесь мы имеем дело с расчетом кинетической энергии тела и основного момента импульса различных точек тела относительно неподвижной точки O. кинетическая энергия тела. пусть v скорость точки m объекта с координатами x, y и z относительно движущейся оси Oxyz, связанной с объектом.
Вычислить моменты инерции однородного прямоугольного параллелепипеда со сторонами а, Ь, с относительно прямых, проходящих через центр и параллельных ребрам. Людмила Фирмаль
Поскольку проекция угловой скорости на ось Oxyz равна p, q, r, то проекция скорости v на эти оси vx, vy, vz разрез 44 ЧХ = кв ры, вы = ГХ ПЗ, ВЗ = пы ц, откуда = П2 + П2 = П2 У2 Z2 с 2 кв 22ч Х2 + Р2 Х2 + У2 2qryz 2rpzx 2 pqxy. Используйте обозначения, принятые в пункте 318. 5 nCU2 + Р2 = а, м З2 + Х2 = Б г Х2 + У2 = с, 2 РНЗ Д, 2=. S = F Где A, B и C моменты инерции тела относительно осей Ox, Oy и Oz, А D, E и F моменты центробежной инерции.
Затем вычисляют полную кинетическую энергию тела mv2, и обозначают через T: м = Ар2 4 Bq2 4 с Р2 2Dqr 2Erp 2Fpq. В частности, для оси Oxyz, связанной с телом, принимая главную ось инерции в точке O, коэффициенты D, E, F будут равны нулю, а кинетическая энергия будет иметь вид: м = АР2 + с 72 + файлов CR2. Ту же формулу для кинетической энергии можно получить следующим образом: Mk2 указывает момент инерции тела относительно мгновенной оси, а a, b и c указывают Косинус направления этой оси относительно оси Oz. Получаем стр. триста восемнадцать Af 2 = Aa2 4 Bb2 4 Cc2 2Dbc 2Ec 2Fab Так как угловая скорость вращения равна c, то кинетическая энергия равна Mk2 2.
- С другой стороны, проекции Р, Q и R вектора 0 на оси равны дя, БВ, и CW. После компиляции продукта Mk2 2 вы получите уже найденные формулы. Момент импульса. Точка. Построим главный момент ОА импульса всех точек тела относительно точки О, против времени t. проекция вектора 0 z на движущуюся ось равна zx, ay, ag. Каждая из этих проекций является суммой импульса для осей Ox, Oy и Oz. Проекция импульса точки m на оси Ox, Oy, Oz равна mvx, mvy, mvz.
Момент объема Таким образом, сумма моментов импульса для оси Ox всех точек тела равна xx = 2 м г = 2ИС 2 + Р2 ЗУ удара rxz Или, если вы расположите термины в порядке букв p, q, r, то: топор = АП КТ РП. 4 Эта формула показывает, что cx = при сравнении с уравнением кинетической энергии t. аналогично, угловой момент ag для осей Oy и Oz dt. АВ йй р р Принимая главную ось инерции тела в точке O, за ось Oxyz, мы уже упрощаем формулу a2, которая является: Гы = БК, ЗГ = СГ. 5 Уравнение движения. Далее мы обратимся к вопросу о механике. Данная сила Flt F2,..Примените теорему движения, чтобы вывести уравнение движения, в котором реакция неподвижной точки O Q действует на твердое тело.
Тогда на оси вращения будут существовать две точки, расположенные симметрично относительно центра тяжести, для которых будет выполнено указанное условие. Людмила Фирмаль
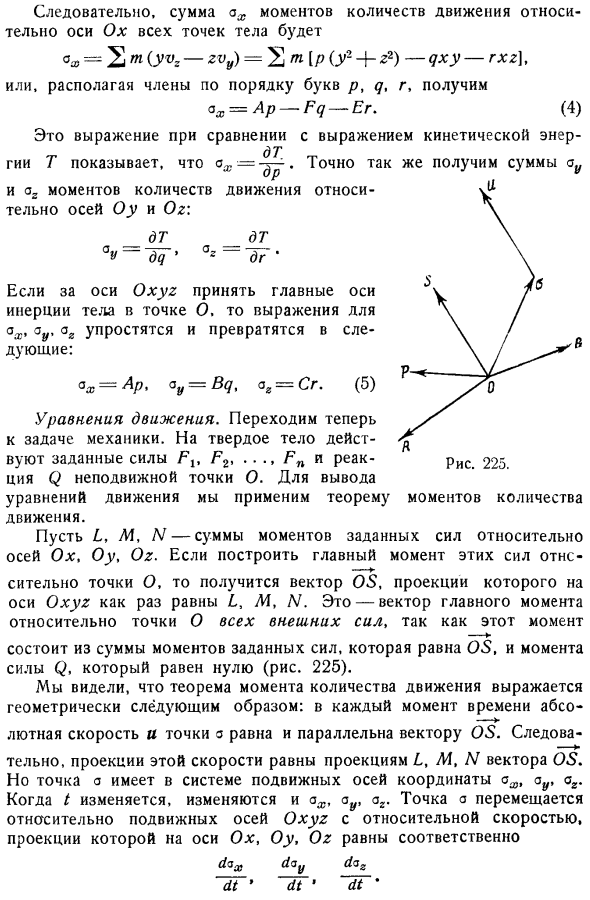
Пусть L, M, N сумма моментов силы относительно осей Ox, Oy и Oz. При построении основных моментов этих сил относительно точки O проекция на ось Oxyz приобретает вектор OS, который в точности равен L, M и N. It предполагается, что этот момент представляет собой силу, равную суммарной ОС данного момента, и силу нулевого Q момента рис.225. Было установлено, что теорема об угловом моменте выражается геометрически в виде follows. At в каждый момент времени абсолютная скорость и точка о равны и параллельны вектору ОС. Таким образом, проекция этой скорости будет равна проекции L, M, N вектора OS. Но координаты точки А это ay, ag, а система оси движется.
Если t изменяется, то ah, ay, sr также изменяется. Точка а движется относительно движущейся оси Oxyz с относительной скоростью, где проекции на оси Ox, Oy и Oz соответственно равны относительным скоростям. dax день daz dt 9 dt скорость переноса в точке c при движении оси dF проецируется на ту же ось Рэй, Ракс ПЭТ, РЗУ Итак, существует проекция на абсолютную скорость и точку А, которая является геометрической суммой относительной скорости и полезной нагрузки Дакс. деды. Рэй 1 Гаа Я заплачу Теорема о импульсе делает эти проекции равными L, Л4 и N. следовательно, существует уравнение движения. Даксдей. АР + Каз Г =Л Р + Гах па,=М.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
