
Оглавление:

Влияние линейного сопротивления на вынужденные колебания
- Использование главных координат при учете линейного сопротивления не приводит к значительному упрощению системы дифференциальных уравнений, но в то же время нарушает симметрию, поэтому используйте произвольные обобщенные координаты q {и q2 Рекомендуется. В этом случае кинетическая энергия и потенциальная энергия выражаются уравнениями (57) и (60), а функция диссипации — (62). Рассмотрим гармонизацию обобщенных возмущающих сил. Qi = Ht sin (pz + 8); £? ® = W2sin (pz + 8).
Подстановка этих значений для указанных величин в уравнение Лагранжа (56) дает следующую систему линейных дифференциальных уравнений с принудительным дифференциалом с учетом линейного сопротивления. (Aii9i + Hn? I + Cii? I) + («i292 + Hi2? 2 + ci292) = W1sin (pr + 5); (97) (Ai29i + Hi2 «i + ti2? I) + (a22? 2 + H2292 + c2292) = H2sin (pz + 8). Решением системы уравнений (97) для каждой системы координат является сумма соответствующих движений qlc, q2c и вынужденных колебаний q1B, q2 „. ? 1 =? 1с + 91. ; 92 =? 2s +? 2.
Будем полагать, что массы присоединяющихся и отделяющихся точек в единицу времени малы по сравнению с массой тела и что процесс присоединения и отделения точек происходит непрерывно. Людмила Фирмаль
В зависимости от корня характеристического уравнения однородной системы, полученного путем отбрасывания правой части из (97), затухающие колебания и затухающие непериодические движения или эти движения могут быть линейно объединены по отдельности. Рассмотрим вынужденную вибрацию g «q2». Они являются конкретными решениями системы уравнений (97). В этом случае вам нужно искать в следующем формате 9le = B1sin (pr + 8) + n1cos (pz + 8) = / «iSin (pz- | -8- £ 1);) q2» -B2 sin (pZ + 8) + D2cos (^ z + 8) = J2sin (pf + 8-E2). J константы Dt, B2 и D2 связаны с константами At, A2, £ i и e2 соотношением.
И соответственно амплитуда At, A2 и сдвиг фазы et, e2 -4, = Uv | + /> 1; tge ^ -Dj / B ;; ‘L2 = Bl + D2J tge2 = — Присвойте (98) системе уравнений (97). Получите действительное удостоверение личности в любое время. Если вы собираете термины, которые включают синус и косинус отдельно для каждого тождества, их коэффициенты должны быть равны нулю. Это дает систему из четырех уравнений для определения неизвестного B. B2. D2: Bi (sc- «1 iP2) — £> j Привет iP + B2 (cl2-ai2p2) -l Blixnp + Dl (cit-allp2) + B2iii2p + D2 (cl2-ai2p2) = 0; I Bi (ci2-al2p2) -Dtiil2p + B2 (c22-a22p2).
Можно доказать, что это система неоднородных линейных уравнений. То есть определитель не равен нулю для значения р. Решите уравнения одновременности (101), чтобы полностью определить константы B2, B2 и D2. Неспособность решить уравнения одновременности (101) может сделать выводы о влиянии линейного сопротивления на вынужденную вибрацию системы с двумя степенями свободы. В системе с одной степенью свободы вынужденная вибрация представляет собой незатухающую гармоническую вибрацию, которая возникает на частоте возмущающей силы. Они не зависят от начальных условий. В отличие от отсутствия сопротивления, амплитуда вынужденных колебаний остается постоянной при резонансе.
Для систем с n-степенью свободы вывод о влиянии линейного сопротивления на вынужденную вибрацию остается тем же. Например, системы с бесконечными степенями свободы, такие как различные типы сплошных сред, генерируют более сложные колебания. В некоторых случаях система с конечными степенями свободы может быть заменена с достаточной точностью. Для сплошных сред дифференциальные уравнения движения являются дифференциальными уравнениями в частных производных. Это отличается от системы, в которой дифференциальное уравнение имеет нормальную конечную степень свободы. Пример 1.
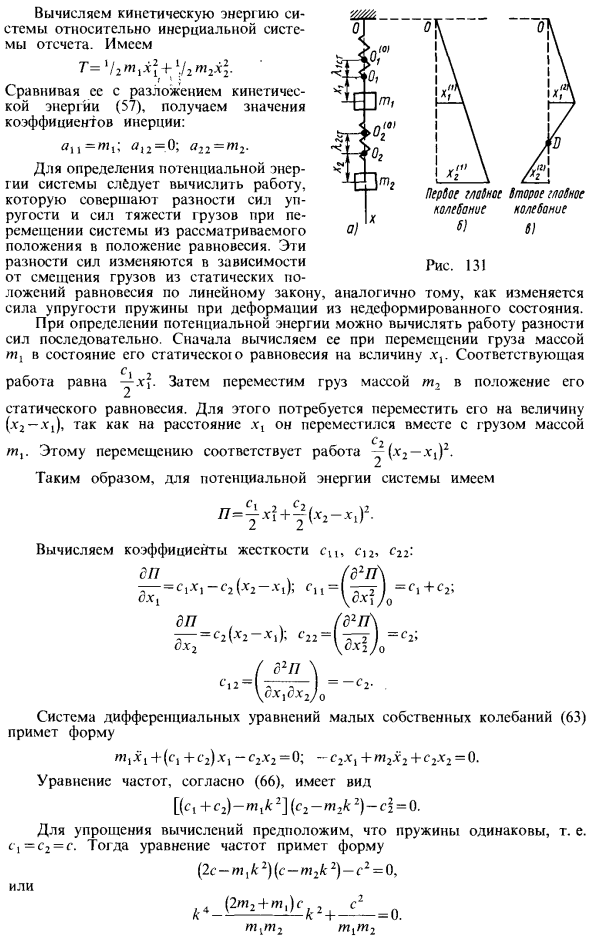
Две нагрузки массой t и t2 прикреплены к пружине с коэффициентами жесткости c и c2 (рис. 131, а). Исследовать вибрацию системы. Решения. Рассматривая движение продукта только в вертикальном направлении, вы можете видеть, что система имеет две степени свободы. Используйте обобщенные координаты системы перемещения груза x и x2. Рассчитать из положения о статическом равновесии товаров. Это удаляет гравитацию продукта из уравнения. Это связано с тем, что изделие находится в положении статического равновесия, уравновешенного упругостью пружины.
- Разность сил изменяется в зависимости от смещения нагрузки от положения статического равновесия по линейному закону, а также изменяется. Пружина упругой силы в момент деформации из недеформированного состояния. При определении потенциальной энергии разность сил может быть рассчитана последовательно. Сначала вычислите ce при перемещении груза массой m в состояние статического равновесия x. Соответствующая работа равна yx2. Затем переместите груз с массой tg в его положение равновесия. Для этого нужно было двигаться на оба расстояния x и перемещаться с грузом массы w. Работа y (x2 — xj2 соответствует этому смещению.
Следовательно, о потенциальной энергии системы, Рассчитайте коэффициент ^ ^ — ^ X.-Cj -’- (Sb = (Sb- Система является дифференциальной и принимает вид: небольшое уравнение собственных колебаний (63) Форма частотного уравнения согласно (66) имеет вид Для упрощения расчетов пружины одинаковы, то есть <! Предположим, что = C2 = s. Тогда частотное уравнение принимает вид: Его решение: Оба решения, и положительные м2 /! , = (), Ожидается, что будет эффективным Больше чем масса t2 & 1 = 0; кг = у / с1тг, Другими словами, нагрузка массы m не вибрирует, а нагрузка массы t2 вибрирует так, как если бы она была прикреплена к неподвижному телу одной пружиной.
На втором этапе, воспользовавшись уравнениями Лагранжа в обобщенных координатах, составим дифференциальное уравнение малых колебаний системы и найдем частоту и период этих колебаний. Людмила Фирмаль
Предполагая, что масса t2 бесконечно велика по сравнению с t2, kt = 0. k2 = .j2clm2. В этом случае груз с массой затем он т т нагрузки, он К кузову, который не двигается с двумя пружинами. Рассмотрим случай, когда новая вибрация принимает следующую форму: tx1 + 2cx1-cx2 = Таким образом, частотное уравнение выражается в виде (2e — m42) (c — mt2) — c2 = 0. Уникальное уравнение t2k4 — ztsk2 + c2 = 0. Из частотного уравнения определите квадрат частоты основной вибрации. Форм-фактор Согласно (69) значение Первая основная вибрация частоты A — это x («и xy ^ pjxV». Включает смещение x’21 и xy ‘= p2xi, поскольку p2 <0, x \ 2’ и xY противоположны. Основные формы вибрации изображены схематически.
Смещение продуктов, которые вибрируют горизонтально справа налево, в основном отрицательное. Отложите расстояние продукта вертикально от вершины первой пружины. В случае первой основной вибрации смещение первой нагрузки представлено горизонтальной линией xU. Второй сегмент смещения нагрузки — горизонтальный xU (рисунок 131.6). Оба сегмента направлены вправо, поэтому они имеют одинаковый знак, например, положительный. Сегмент x, вторая основная вибрация (при условии, что смещение xY положительное, 21 размещено на правой стороне, а x’Y отрицательное, поэтому xY должно быть размещено на левой стороне (рис. 131, c ).
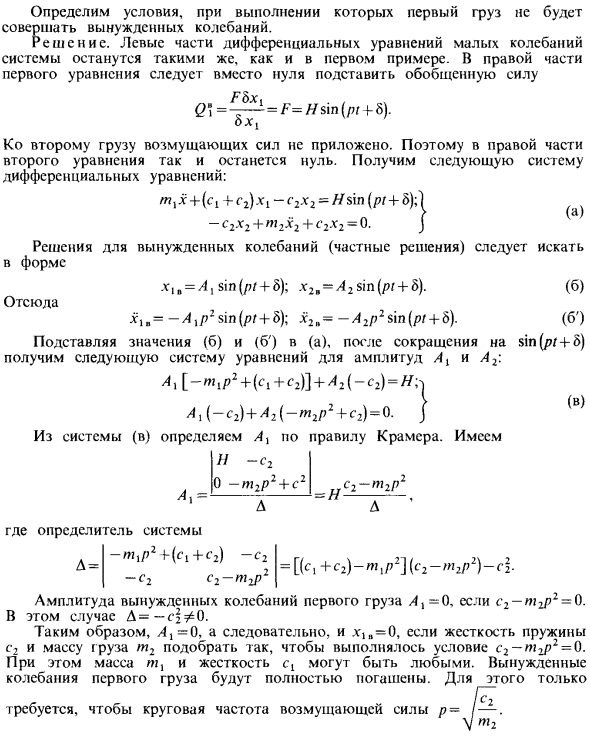
Во-вторых, пружина D во второй основной вибрации всегда остается неподвижной. Такая точка называется узлом. Вторая основная вибрация имеет один узел. Первой серьезной вибрации узла нет. Пример 2. Показать эффект демпфирования вынужденной вибрации первой нагрузки массой t2 с использованием условий в Примере 1. Для этого предположим, что сила гармонического возмущения F (t) = Hsin (pt + S) приложена к начальной нагрузке и направлена вертикально вниз. Кроме того, I, P и 8 являются постоянными. Определите условия, при которых первая нагрузка не заставляет колебаться. Решения. Левая часть дифференциального уравнения малого осциллятора системы остается такой же, как и в первом примере.
В правой части первого уравнения подставьте обобщенную силу вместо нуля Ci = «£ ~ = f = n sin0я + 8)’ Вторая нагрузка возмущающей силы не применяется. Таким образом, ноль остается в правой части второго выражения. Получена следующая система дифференциальных уравнений. Нужно искать решение для принудительной вибрации (конкретное решение) (А) t, sin (p / + 8); x2 = A2sin (pr + 8). liP2sin (pr + 8); x2, = — <42p2sin (pr + 8). Подставляя значения (b) и (b ‘) в (a) для упрощения, тогда система уравнений с амплитудами A и A1 [-t1p2 + (e1 + e2)] + L2 (-e2) = H; получить. L1 (-c2) + L2 (-t2p1 + c2) = 0 Дж.
Из системы (c) определите A согласно правилам Крамера. У нас есть Отсюда (В) (С) Место будет определено Амплитуда вынужденной вибрации первой нагрузки L | = 0. если cr-W2Pr = 0. В этом случае A = -c2 # 0. Следовательно, если масса жесткости пружины c2 и нагрузки t2 выбрана так, что выполняется условие c1-m1p2 = 0, то Λ = 0 и, следовательно, x1b = 0. Кроме того, масса m и жесткость ct являются необязательными. Первое принудительное изменение нагрузки полностью окупается. для Требуется круговая частота возмущающей силы.
Смотрите также:
Задачи по теоретической механике
