
Оглавление:
Общая постановка задачи устойчивости по А. М. Ляпунову
- А. Общее заявление по вопросам стабильности М. Ляпунова Русский ученый А. М. Ляпунов впервые дал строгое определение устойчивости в 1892 г. с работой «Общие проблемы устойчивости движения». Отсутствие такого определения часто вводит в заблуждение, поскольку движение, которое является устойчивым в одном смысле, может стать нестабильным, если вы понимаете эти слова в другом смысле, и наоборот. Определение стабильности А. М. Ляпунова было очень успешным и в настоящее время считается основной проблемой, поскольку оказалось лучшим способом решения многих технических проблем.
Опишем движение системы автоматического управления с помощью дифференциального уравнения. dyjdt = Yi {y t0. Y1 = Y \ (Y \ o. Y …… Y на * 0- (3.2) Решение (3.2) описывает поведение системы, которое определяется начальным состоянием. Некоторые из четко определенных движений систем, которые исследуются на устойчивость, называются невозмущенными движениями. Обратите внимание, что выбор беспрепятственного движения является произвольным. Это все возможные движения системы, как стационарные, так и нестационарные.
Предположим, что движение, описываемое функцией заданного времени, выбрано в качестве невозмущенного движения Y \ = Y \ (‘)> Yy = Y \ (0 «. Yn = Yn (‘) • (3 3) Людмила Фирмаль
Предположим, что функция y * (t) является частным решением дифференциального уравнения (3.1). dy; (() / di ^ Yt (yv /), (3.4) / = / 0 начальное условие Vx = V \ (t0), Vx = V \ (f0). — * Yn = Y ,, Co) — (3-5) В некоторых случаях, когда параметры системы не изменяются со временем и функция Yi не зависит явно от /, движение (3.3) является устойчивым состоянием. Они отвечают решением t / t = const, (3.6) Роль как корень уравнения ULU »U2 ….. одной компании) = 0. (3.7) Измените условие (3.5), чтобы получить небольшие приращения модуля e переменных y1, y2, …, yn, e2, …, en, то есть t- / 0 Vx = V \ Co) + V2 = 1 /; (o) + ®2 ….. = yn Co) + (3.8) Движение системы, соответствующее измененному начальному условию (3.8), называется движением возмущения.
Другими словами, возмущение системы — это движение системы, отличной от невозмущенной системы. Введите новую переменную * «= 01 (0-4 (0. <3-9) Равная разность переменной yt в возмущающем и невозмущенном движении. Переменные Xt называются отклонениями или вариациями Количество yi-если все отклонения равны нулю xx = 0, * 2 = 0 ….. xn = 0. (3.10) Возмущающее движение yt (t) соответствует возмущающему движению y * (t). Другими словами, нулевое значение переменной xt соответствует движению возмущения. Если t = ^, предположим, что переменная ^ принимает часть начального значения xiQ, хотя бы одно из которых не равно нулю. = * io = ei- (3.11)
Предмет теория автоматического управления тау
| Элементарные звенья и их характеристики | Теоремы к. М. Ляпунова об устойчивости движения по первому приближению |
| Понятие устойчивости | Условия устойчивости линейных систем автоматического управления |
Примеры решения и задачи с методическими указаниями
| Решение задач | Лекции |
| Сборник и задачник | Учебник |
- Начальное отклонение (3.11) называется возмущением. А. М. Ляпунов дал следующее определение устойчивости. Для любого положительного числа e, даже если любое положительное число e мало, непертурбативное движение, называемое устойчивым по отношению к возмущению xx, имеет вид 2 (3.12) И неравенство I> / / 0 2 (313) / = я В противном случае движение будет нестабильным. Определение устойчивости А. М. Ляпунова дает следующую геометрическую интерпретацию. Множество отклонений xi dxr, xn в n-мерном пространстве переменных Xi, xi, …, xn определяют точку M (называемую точкой изображения).
Беспрепятственное движение xt = 0 соответствует исходной точке с фиксированной точкой. Например, рассмотрим i «= 3 и построим в 3D 3 _ Координатное пространство X (две сферы: сфера s => радиус сфера b = 3 _ e = XxjQ2 с радиусом Выберите маленький радиус для сферы e. в противном случае
В возмущении репрезентативная точка представляет конкретную траекторию, когда величины x1, x1, …, xn изменяются. Людмила Фирмаль
Сфера b обладает следующими свойствами: нарисуйте точку M, которая начинает двигаться из любой точки Mo внутри сферы или на поверхности сферы, и любое дальнейшее движение всегда будет оставаться внутри сферы e и на ее поверхности. Никогда не достигайте (Рисунок 3.3). Если невозмущенное движение неустойчиво, траектория точки M изображения пересекает сферу изнутри наружу с течением времени (или ее поверхность входит в эту точку). Отметим, что если t> 3, движение точки изображения в многомерном пространстве относительно гиперповерхности (гиперсферы) должно быть учтено, и рассмотрение теряет свою видимость.
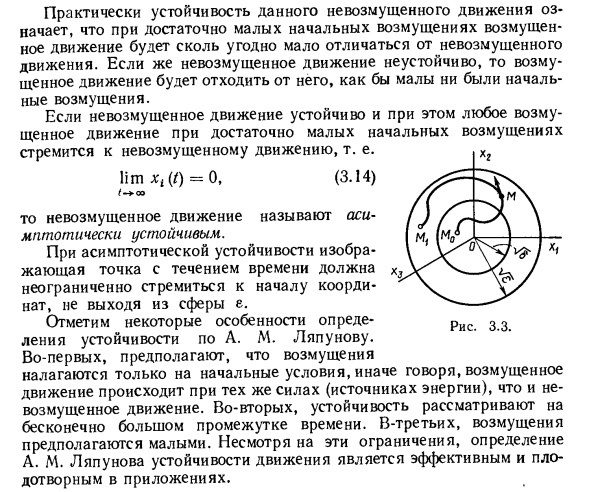
На практике устойчивость этого невозмущенного движения означает, что при достаточно малом начальном возмущении возмущенное движение почти такое же, как невозмущенное движение. Если движение без возмущения неустойчиво, движение возмущения удаляется от него, независимо от того, насколько малым является начальное возмущение. Движение возмущения с достаточно малым начальным возмущением имеет тенденцию быть невозмущенным, в то время как движение без возмущения устойчиво. Вызывается Рисунок 3.3. (3.14) lim *, (/) = 0, Упражнения без возмущений оптимально устойчивы.
В случае асимптотической устойчивости точка изображения стремится двигаться в направлении начала координат без границ с течением времени, не покидая сферу e. Отметим некоторые особенности определения устойчивости А. М. Ляпунова. Во-первых, нарушение Другими словами, возмущающее движение происходит с той же силой (источником энергии), что и невозмущающее движение. Во-вторых, стабильность рассматривается в течение бесконечно длительного периода. В-третьих, возмущение предполагается малым. Несмотря на эти ограничения, А. Определение кинематической устойчивости М. Ляпунова эффективно и плодотворно в приложениях.
