
Оглавление:
Понятие устойчивости
- Концепция устойчивого развития Автоматизированные системы всегда подвержены различным внешним помехам, которые могут помешать нормальной работе. Правильно спроектированная система должна стабильно работать при любых помехах. В простейшем случае понятие устойчивости системы связано со способностью восстанавливать равновесие (с определенной степенью точности) после потери внешних сил, вышедших из этого состояния. Если система нестабильна, система не вернется к выведенному равновесию, но отойдет от системы или вызовет недопустимо большие вибрации в окружающей среде.
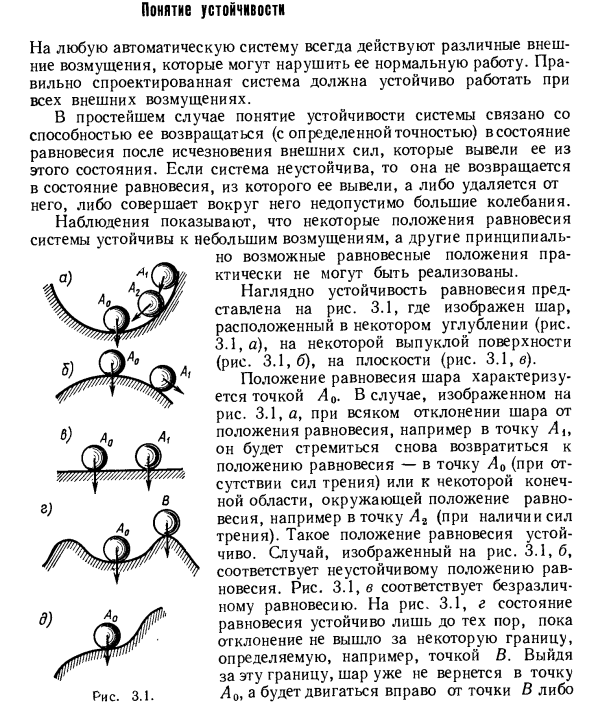
Понятно, что стабильность равновесия показана на рисунке. 3.1, показывает шар в определенной выемке (рис. 3.1, а), выпуклой поверхности (рис. 3.1.6), плоской (рис. 3.1, в). Положение равновесия мяча характеризуется точкой A0. Как показано на рисунке 3.1, a, например, отклонение шарика из положения равновесия в положение от стремления снова вернуться в положение равновесия — в точку absolute0 (если нет силы трения) или в некоторую окружающую положение равновесия Конечная область, например, точка 22 (если есть сила трения).
Наблюдение показывает, что некоторые положения равновесия системы устойчивы к небольшим возмущениям, но другие принципиально возможные положения равновесия достигаются редко. Людмила Фирмаль
Это равновесие стабильно. Дело показано на рисунке. 3.1 и b соответствуют неустойчивым положениям равновесия. Рисунок 3.1.6 соответствует индифферентному балансу. Рис. 3.1, d. Состояние равновесия стабильно только до тех пор, пока уклонение не превысит определенную границу, например, определенную точкой B. 3.1. Ло, а всегда перемещается вправо от точки В или переходит в новое состояние равновесия в соответствии с формой поверхности, то есть, наконец, в соответствии с уравнением движения шара. Поэтому в общем случае понятия «малая», «большая» и «общая» устойчивость вводятся при рассмотрении нелинейных систем.
Система является «маленькой» и устойчивой, если подтверждается только факт существования стабильной области и ее границы никак не определены. Как только граница области устойчивости определена, система называется «большой» устойчивостью. Это означает, что граница области начального отклонения, в которой система возвращается в исходное состояние, определена, и фактическое начальное отклонение принадлежит этой области. Если система возвращается в исходное состояние из-за начального отклонения, систему обычно называют «*». «Общая» устойчивость для определенного класса нелинейностей называется «абсолютной» устойчивостью.
Предмет теория автоматического управления тау
| Временные характеристики | Общая постановка задачи устойчивости по А. М. Ляпунову |
| Элементарные звенья и их характеристики | Теоремы к. М. Ляпунова об устойчивости движения по первому приближению |
Примеры решения и задачи с методическими указаниями
| Решение задач | Лекции |
| Сборник и задачник | Учебник |
- Таким образом, например, рисунок 3.1, a, «в целом», соответствует устойчивости, а случай 3.1, d, изображенный на рисунке, может учитывать либо «большую» стабильность, либо «небольшую» стабильность. Ясно, что система, которая «в целом» стабильна, является «большой» и «маленькой» стабильной. Стабильная «большая» система становится стабильной «маленькой» системой. На рисунке 3.1, e показано другое состояние равновесия, называемое метастабильным. Это в основном возможно с нелинейными системами.
Чтобы определить устойчивость равновесия, мы вводим понятие невозмущенного состояния равновесия, соответствующего состоянию покоя в точке A0 на рисунке 1. 3.1, a и состояния возмущения соответствуют, например, точке Alt, когда внешняя сила подвела шар, а затем прекратила движение. Переходя из возмущенного состояния в конкретную область, окружающую невозмущенное равновесие, система становится устойчивой.
В приведенном выше примере с использованием шарика проблема устойчивости решается очень легко. Людмила Фирмаль
Однако в целом не всегда понятно, при каких условиях равновесное положение системы является стабильным. Концепция устойчивости может быть распространена на более общий случай, когда она не является положением равновесия системы и ее движение рассматривается как невозмущенное, например, движение системы по заданному пути. Даже без данного системного движения Совместные изменения должны определяться по определенному закону изменения независимых координат y * (t), y2 * (t), … yn * (t) — как в случае положения равновесия Определенные движения называются непертурбативными движениями. Любые помехи, действующие на систему, приведут к отклонению фактического движения системы от установленного.
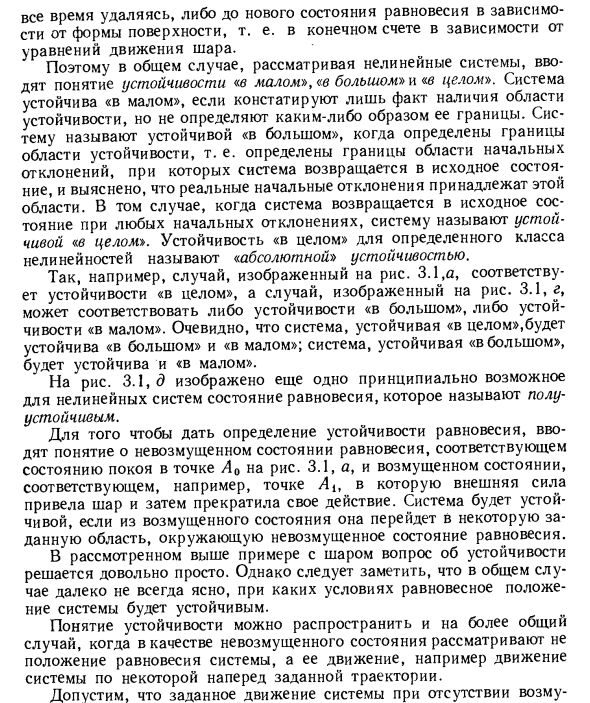
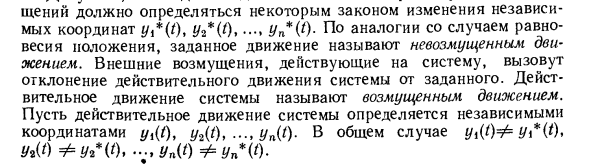
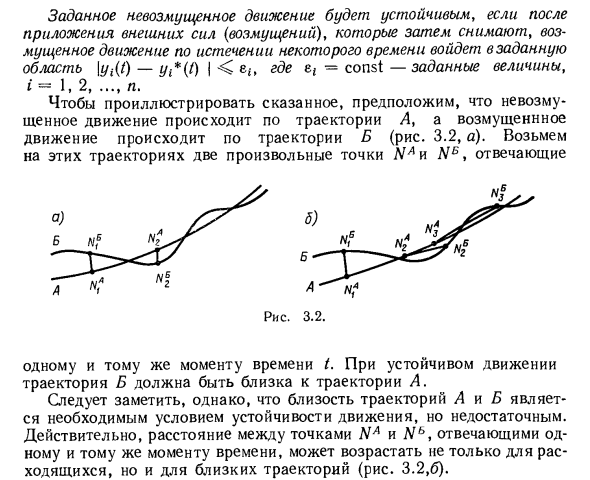
Фактическое движение системы называется возмущением. Убедитесь, что фактическое движение системы определяется независимо Координаты * /, (/), y2 (t) ….. yn (t). Общий случай yM Fy ** ®, ~;, yn (() fup * «). После приложения внешней силы (возмущения), после приложения внешней силы (возмущения), после входа в объем или часть, где задано движение возмущения, движение без данного возмущения стабилизируется | /) — Уf * (/) | <eit, где et-const заданы значения i-1, 2 ….. p. Чтобы объяснить вышесказанное, предположим, что непертурбативное движение происходит вдоль локуса A, а возмущающее движение происходит вдоль локуса B (рис. 3.2, а).
Пусть эти траектории соответствуют двум произвольным точкам NA и Nb. Рисунок 3.2. Т в то же время. Для стабильного движения локус B должен быть близок к локусу L. Однако отметим, что близость траекторий A и B является необходимым условием устойчивости движения, но этого недостаточно. Фактически, расстояние между точками NA и Li, соответствующее одному и тому же моменту, может не только расходиться, но и увеличиваться на близких трассах (рис. 3.2.6).
