
Оглавление:

Приборы для контроля зубчатых колес
- Классификация устройств для контроля шпор, скосов, червячных передач, червяков, а также термины и определения Классификационные группы для этих устройств перечислены в рекомендациях CMEA RS 5298-75. Устройство разделено на 1) устройства для управления передачей по назначению: цилиндр C, скос K, червяк O, червяк 2 и другие колеса (Смешанный, шпионский механизм и шпионский червь) 2) по типу конструкции: мольберт 5, накладные М.
3) Параметры (диаметр и Модуль) стандартный размер колесика управления: 4) Группировка по показателям контролируемой точности: 1 устройство для контроля кинематических ошибок, 2 устройства для контроля ошибок. Шаг 3 — Оборудование для контроля радиального биения (всего 14 групп). 5) Точность класса точности A, AB, B. Оборудование класса Точность A может использоваться для управления передачами, начиная с класса AB и B с третьей точностью, пятой и седьмой соответственно. Точность. Типы устройств, основные параметры и критерии точности контроля прямозубых зубчатых колес приведены в ГОСТ 5368-73.
Оптиметры используются для измерения с помощью концевого относительного метода длины, калибра, сферы, ролика и других высокоточных компонентов. Людмила Фирмаль
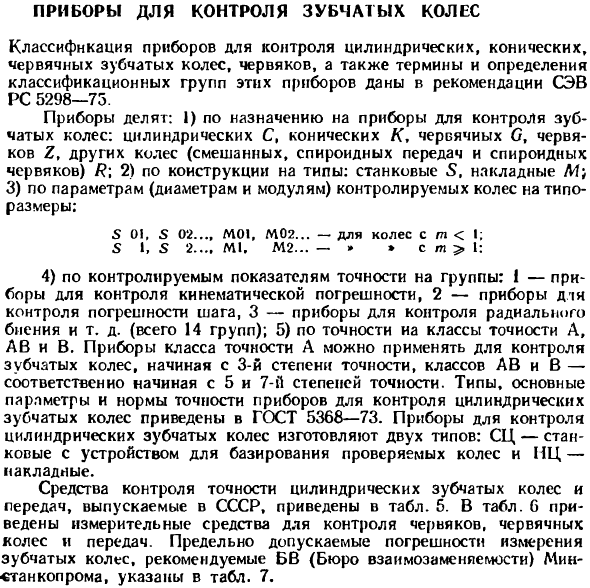
Устройства для контроля цилиндрических зубчатых колес включают колеса, проверенные SC, и SC — счет-фактура. В таблице ниже приведены инструменты контроля точности для цилиндрических зубчатых колес и зубчатых колес производства СССР. 5. В таблице. 6 указывает на измерение Средства для управления червями, червячными колесами и механизмами. Максимально допустимая погрешность измерения передачи, рекомендованная BV (бюро 6. Совместимость) Мин- танковая промышленность , приведенная в таблице. Ste номер параметра контроля по поре.
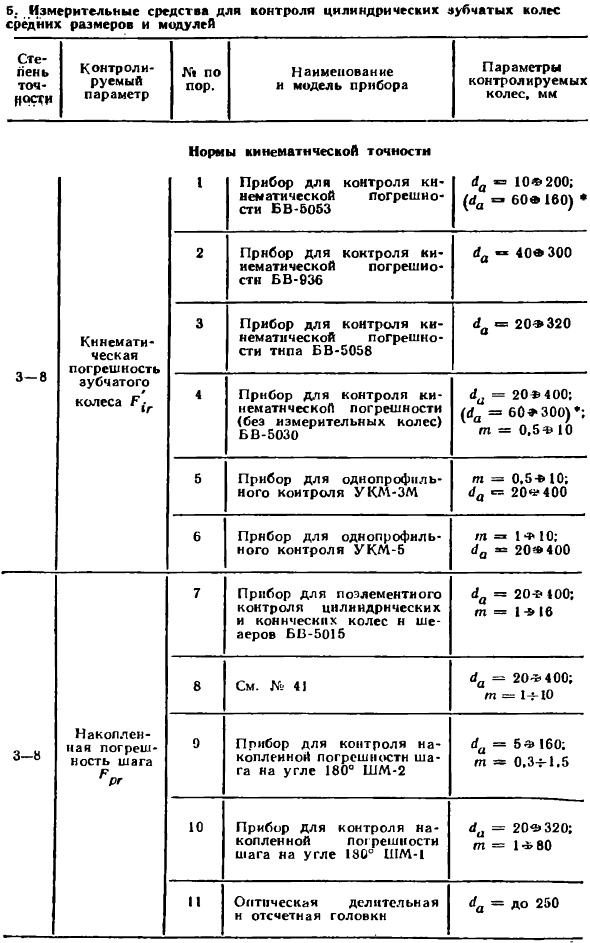
Модель контролируемых параметров устройства 3-8 6-8 Вибрация шестерни на оборот g 1g 12 Оборудование для контроля расстояния (от центра к центру) MT-160 ya = 254-160 13 МЦ-400Б ЧПУ дистанционное контрольно-измерительное оборудование 320 14 Измерительный центр устройства дистанционного контроля ^ СЦСамолисецшаш = 604-320 15 МЦМ-630 (B-5029) Отс, прибор для контроля расстояния до измерительного центра, = 1504-630 16 7-12 17 …. io ( o = t = 0,2-t-2 ygs 18 т = 14-10 19 Sy. 7, 16- 7-12 20 21 22 Normalmer BV-5045 1P-04-120 23 Normalmer BV-5046 07 = 504-350 24 Normalmer 2221-K V-1504-700 25 См. № 7.
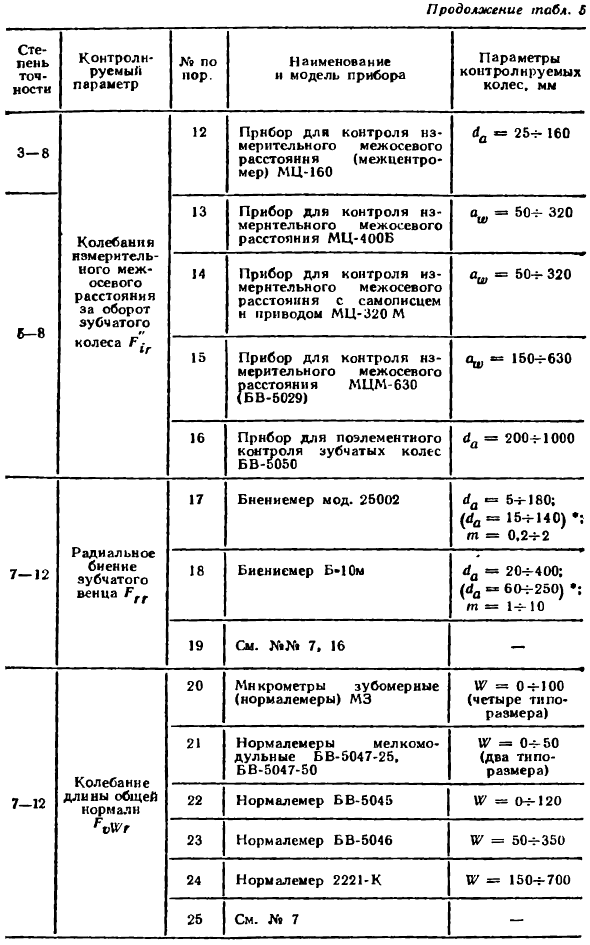
Продолжение таблицы. в Ste контролируемые параметры пор. Модель устройства контролируемых параметров колеса, мм Теодолит с 7-12 точностью 26 автоколлин- 27 IEC-2 электромагнитный магнитометр Автоматическое устройство измерения кинематической погрешности (точности) 28 зубофрезерного станка мод. КН-6М ст 1 соотношение. От 20 1 1 30 3-8 Локальная кинематическая погрешность 4 N Плавность работы Волнометр B V-5024 и BV-5024-s t = 1,5 + 10 30 км. См. 1.2.5, и Колебания 31 К.К. См. 12, 13, 14, 15, 16- Gearing) ^ rbg.
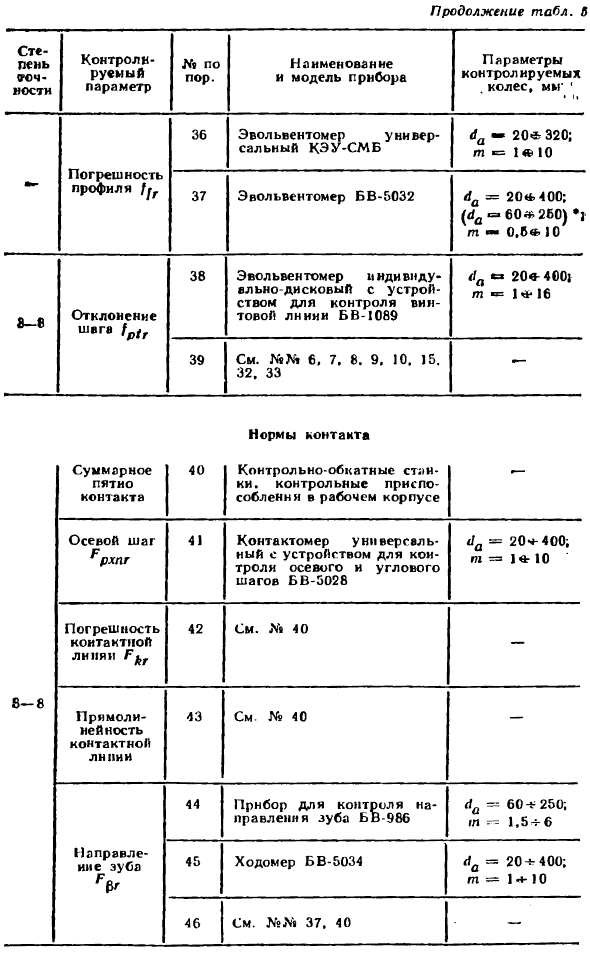
Мод Шагометра для контроля шага зацепления цилиндрического зубчатого колеса. 21501, 21601.21701 т-1,75 + 10 (мод. 21501); m = 8 + 16 (мод. 21601); t = 16 + 40 (мод. 21701) Шагомер BV-5001M t = 2e10 для контроля разницы между шагом 33 зацепления и любым шагом: да, пункт = 200 34 шагомер для контроля BV-5043 и BV-5044 t = 2 * 16; (BV-5043); t = 10 + 28; (BV-5044) См 7 Prsdolz Ste номер параметра контроля по поре. Модель устройства для управления. Колесо, мм 1 -36 универсальный эвольвентный счетчик КЭУ-СМБ Ла-20 * 320; t = 1 * 10 Ошибка профиля G g 37 Involventomer BV-5032 aa = 20 * 400; ( o = 60 * 260) m-0,6 * 10 8-8 шаг отклонения 1р1г38.
- Индивидуальный дисковый эвольвентный счетчик с использованием ligiiKB1V-R OY VI p to 20 * 400 t = 1 * 16. Смотри 3, ММ 6. 7. 8. 9. 10, 15.- 8-8 Блок управления контрольной обкаткой в общей сложности с 40 контактными эталонными работами V1еСгШаГ41 контактный измеритель обратного траления BV-5028 осевого и углового шага А = 20 * 400; t = 1 * 10 lniyaapg P 42 See X 40- Легко понять. 3 См. № 40- Возбудите ае 44 устройства BV-986 a0-60 + 250 для контроля направления зубов. 1л-1,5 * 6 45 прометер B-5034 1a = 20 + 400; Смотри 46 MM 37. 40.
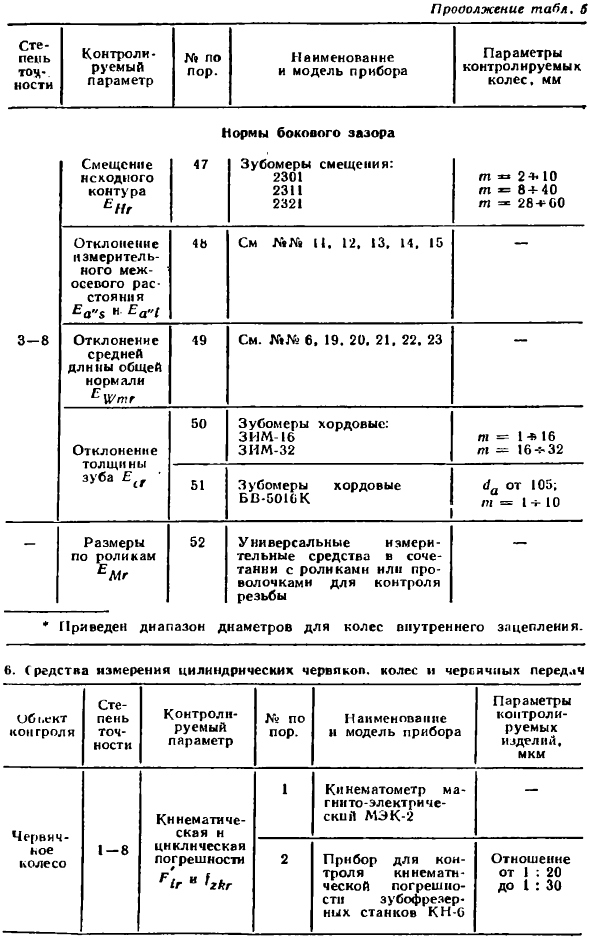
Продолжение таблицы. Ste-to Контрольные параметры Коэффициент бокового зазора 3-8 Смещение контура оттока Нг47 Шагомер смещения: 2311 2321 т = 2 * 10 т = 8 + 40 т-28 + 60 Смотрите МОЙ II. 12.13.14, 15 Всего 49 средних отклонений длины. Смотри 6. 19.20. 21. 21. 22. 23 Стоматолог с отклонением 50 код: ЗИМ-16 ЗИМ-32Щ- + 16 ^ 51 Код Bisher BV-5016K 1a OT 105; t = 1 + 10 ХГ 52 Универсальный измерительный прибор в сочетании с роликами управления или колесом управления Диапазон диаметров внутреннего зубчатого колеса указан. : Самый красный -Ste- Control n-paUameter por0 X.
Приведенные примеры не исключают возможности использования методов замещения для устранения многих ошибок, возникающих при измерении. Людмила Фирмаль
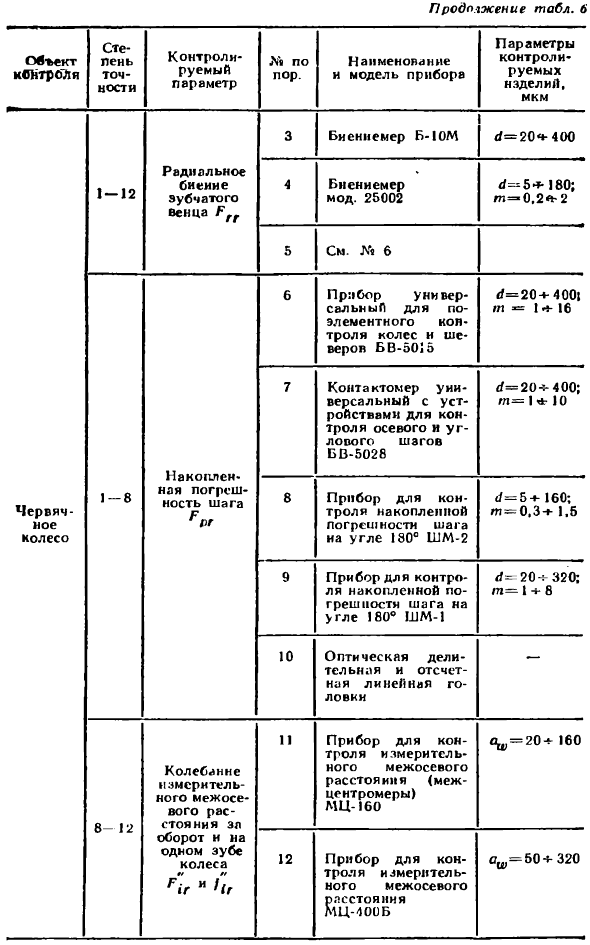
Управление ol-y delny 1-8 Циклическая ошибка1g g 1skiy IEC-2 Коэффициент соотношения коических погрешностей к ^ с2 зубофрезерного станка КН-6 составляет от 1:20 до 1:30. og + ov = o-CHVAHIOANGI I OOH-noah ma Oodiots 3 И 31 -8-ННВБЕ 091 + ог = н. 091 PI (1H 1ENO 1XNaP-Noi N OodiOi II -ig vnyaenihio 0 echepchecheon je onv nN 8-1 8 + 1 = wh ze og = r vn v vt shupteaz -oLkhnoi шт Oodiots 6 d * e, o = -091 + 8 = p SPTA Shaon peoOhOS Джои Ив 1od 1c 8 0 (* = w: oo + ог = вго ^ ядядpoison-Ли и ововоои 11 11 11 11и ннннхохо ^ ^ ^ Янянччччч 91 + 1 = w uip + ogrr B 05-ad aoOea-Oeain X ^ odsoc 9 9 Hell Oh W 31-1 L7y: .yaad oo * oz = p H01-9 W в 1od 1i ch1ge он и ой w-hehe B1C0 tsch i Продолжение таблицы. 6 Управление Stet-Control параметрами пор ° Название устройства и модель Червяку -8 12 Вибрация G1g n Yy 13.
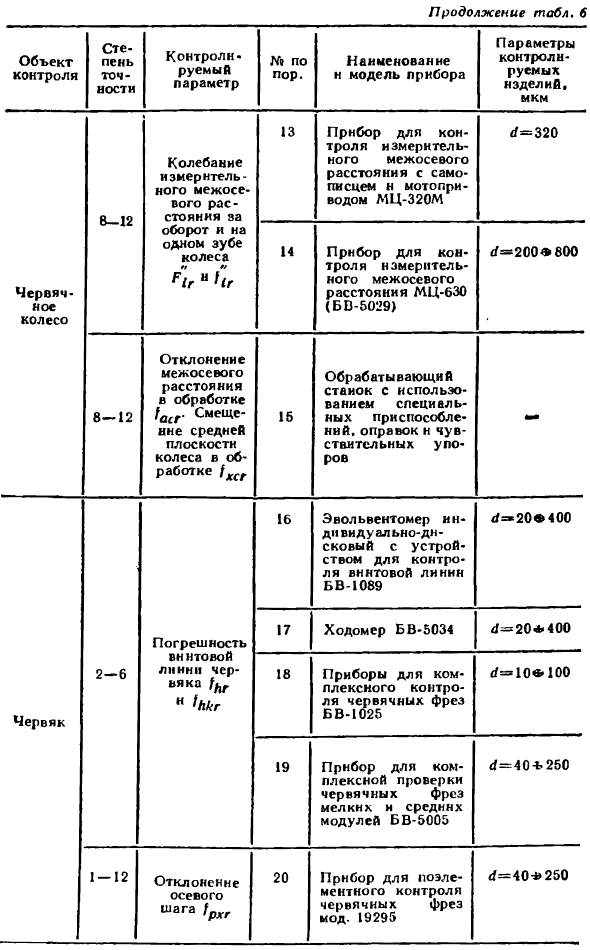
Оборудование для контроля дальномера с регистратором и электроприводом МЦ-320М = 320 14 контрольно-измерительная аппаратура дальнего действия МЦ-630 (БВ-5029) 4 = 200 * 800 8-12 Обработка на центральной плоскости колеса во время обработки) Обработка станка с помощью специального инструмента hsg 16, Оправка и труба Червячный с точностью 2-6 l n 0 At 16 ВИНТОВЫЕ ЛИНИИ BV-1089 Эвольвентный эвольвентный счетчик с контрольным устройством = 20 * 400 17 BV-5034 Walker 4 = 20 * 400 18.
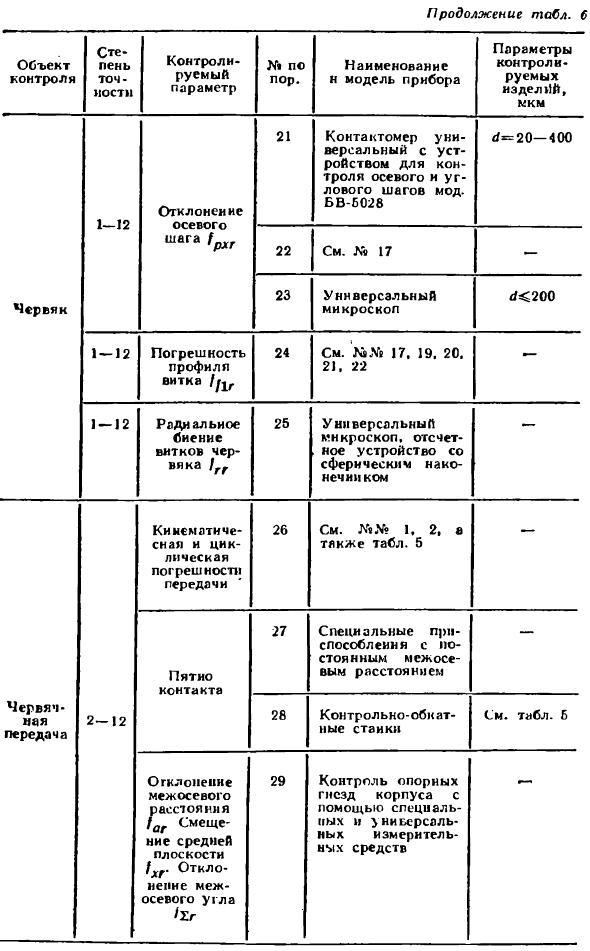
Интегрированное контрольное оборудование-BV-iK5YACHN = 10 * 100 19 модуль NBV- ZHNH4 = 40 * 260 периодического нагрева мельничного устройства 1-12 отклонение 20 управляющего устройства для каждого элемента червячной фрезы 4 = 40 * 250 Продолжение стола, 6 Управляющий объект Ste-Controlled N. n модели устройства параметров управления Контактный измеритель с червячной 21-й осью и блоком контроля ug-BV-6028 1 = 20-400 Смотри 22 № 17- 23 Универсальный JS200 1 12 оборотов профиля ошибка 1 1 г 24 Ct. См. 17. 19. 20. 21. 21. 22 1-12 радиальный 26 Y или общий сферический на I.
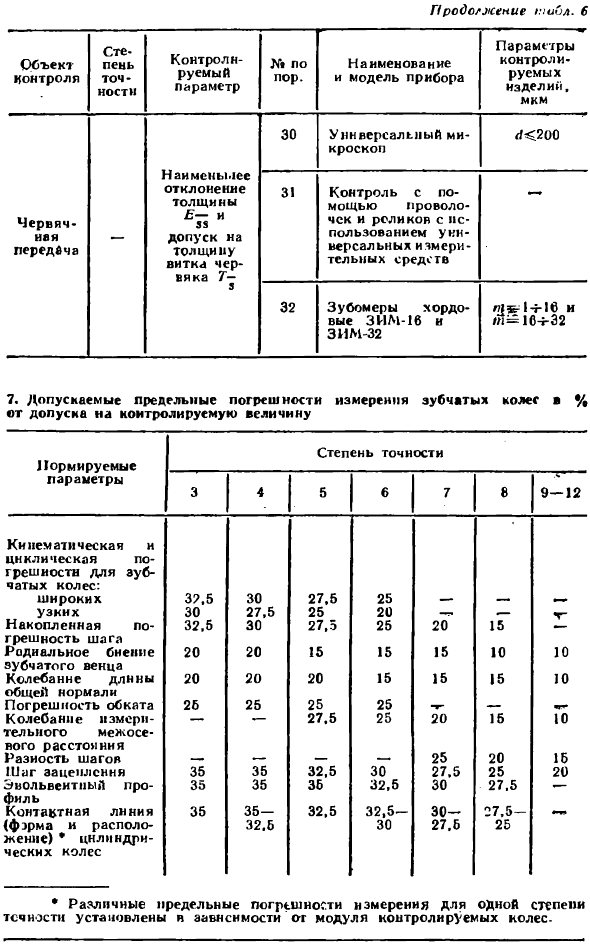
Коробка передач 2-12 Ошибка передачи 26 См. 1.2 и таблицу. 6 27 специальное расстояние 28 элементов управления Среднее отклонение угла оси Xg 29 Поддержка затяжки и контроль универсальных средств Продолжение и ибл. 6 Целью управления является поры параметра Ste-Control n. Имя устройства и параметры управления моделью * Червь-30 Универсальный средний 1 200 Толщина вращения червяка контролируется почкой и валиком с допуском толщины G-31PS- Збал код ZIM-16 n ZIM-32 л № 1 + 10 и № 10 + 32 2. Я принимаю.
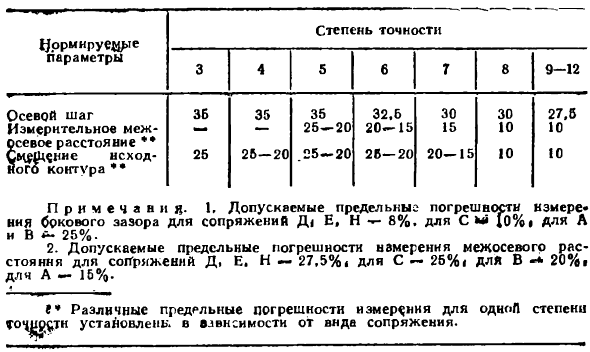
Очевидные ошибки в намерениях сопряженных D, E межосевых гонок. Н-27,5%, С: -26%, В: — * 20%. Точность качества корма Параметр 3 4 5 6 8 9-12 Осевой шаг 36 35 35 32,6 30 30 27,6 25-21 20-15 15 10 Осевое расстояние * ^ ^ coeture X ° D 26 26-20 .25-20 26-20 20-15 10 10 I. Допустимые сопряженные пределы D, E, H- Одностадийные различные предельные погрешности измерения T ° 1 ^ tn устанавливаются с той же разницей, что и тип * .. сопряженного.
Смотрите также:
Решение задач по метрологии с примерами
